测试:
Kotlin
fun main() {
val xiaoMing = Human("小明")
xiaoMing.speak()
var chenHaoNan = Human("陈浩南", "我陈浩南出来混,靠的就是三样东西:够狠、够义气、够朋友!")
chenHaoNan.speak()
}
class Human (var name: String, var zuoyouming: String) { // 主构造函数
constructor(name: String): this(name, "好好学习,天天向上") { // 辅助构造函数(secondary constructor)
println("Human secondary constructor...")
// this.name = name;
// this.zuoyouming = zuoyouming;
}
init {
println("Human init...")
}
fun speak() {
println("我是$name, 我的座右铭是:$zuoyouming")
}
}打印:
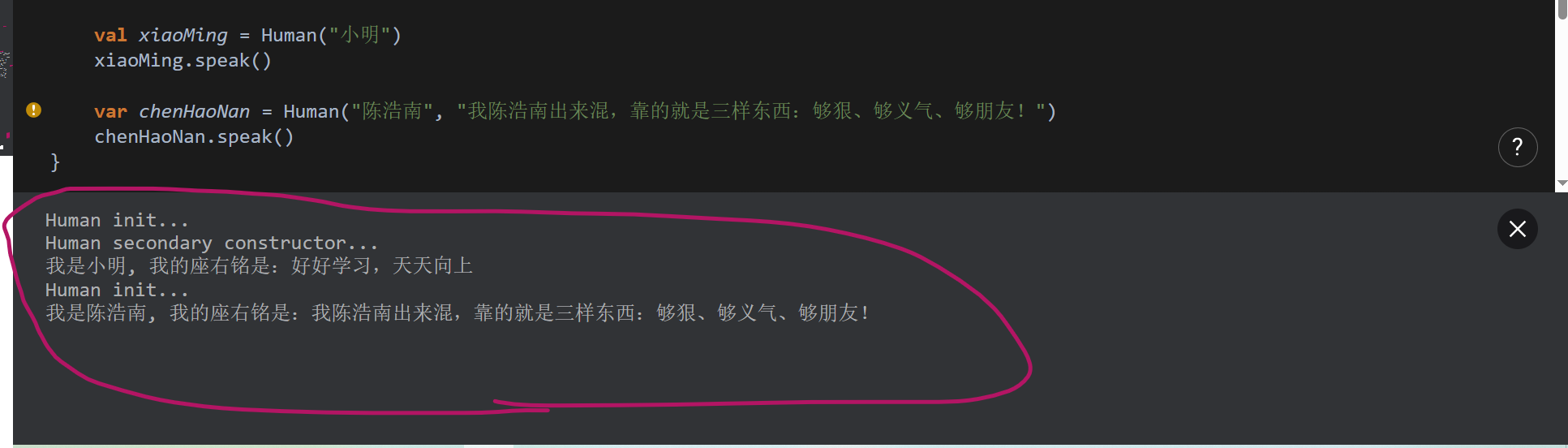
ok. 可以看出int代码块比构造函数调用早。