在上一篇中,我们解析了CoDeSys软件模型的分层架构和"设备"这一顶层元素。而软件模型的核心价值------程序的并行执行与精准控制,主要依赖于"任务配置"和"应用对象"的协同工作。本文将聚焦任务配置、程序组织单元(POU)、全局变量等核心应用对象,详细讲解其功能、配置方法及使用要点,帮助你掌握程序运行的核心控制逻辑。
一、任务配置:程序执行的"调度核心"
在CoDeSys软件模型中,任务是控制程序执行节奏的核心元素,通过任务机制可实现程序不同部分按不同时间、不同频率并行执行,彻底突破传统PLC顺序扫描的局限。任务隶属于应用对象,每个应用内可配置多个任务,由任务调度器根据优先级和周期管理程序的执行顺序。
1. 任务的核心作用与分类
任务的核心作用是定义程序的执行规则,包括执行周期、优先级、触发方式等,确保不同功能的程序模块在合适的时机运行。根据触发方式的不同,CoDeSys中的任务主要分为两类:
- 周期性任务:按固定周期重复执行,是最常用的任务类型,适用于需要定期采集数据、执行控制逻辑的场景(如温度采集、电机转速调节等)。周期可根据需求灵活设置,例如10ms、100ms、1s等。
- 事件触发任务:不按固定周期执行,仅在特定事件发生时触发,适用于突发场景的处理(如急停信号触发、故障报警响应等)。常见的触发事件包括:外部信号上升沿/下降沿、定时器溢出、中断请求等。
由于 CoDeSys V3.x 在任务配置时有如下的属性,编程者需遵循如下规则:
循环任务的最大数为 100;
自由运行任务的最大数为 100;
事件触发任务的最大数为 100;
根据目标系统,PLC_PRG 可能会在任何情况下作为一个自由程序执行,而不用手动插入 任务配置中;
处理和调用程序是根据任务编辑器内自上而下的顺序所执行的。
2. 任务的核心配置参数
在CoDeSys中,任务配置通过设备树的"任务配置"节点完成,核心配置参数包括:
- 任务名称:用于标识任务,建议采用"功能+周期"的命名方式(如"温度采集_100ms"),提升可读性;
- 执行周期:仅针对周期性任务,设置任务重复执行的时间间隔,需根据控制精度需求合理选择,避免周期过短导致CPU负载过高;
- 优先级:任务的执行优先级,数值越高优先级越高(具体范围因PLC型号而异)。当多个任务同时就绪时,调度器优先执行高优先级任务,确保关键逻辑(如急停处理)优先响应;
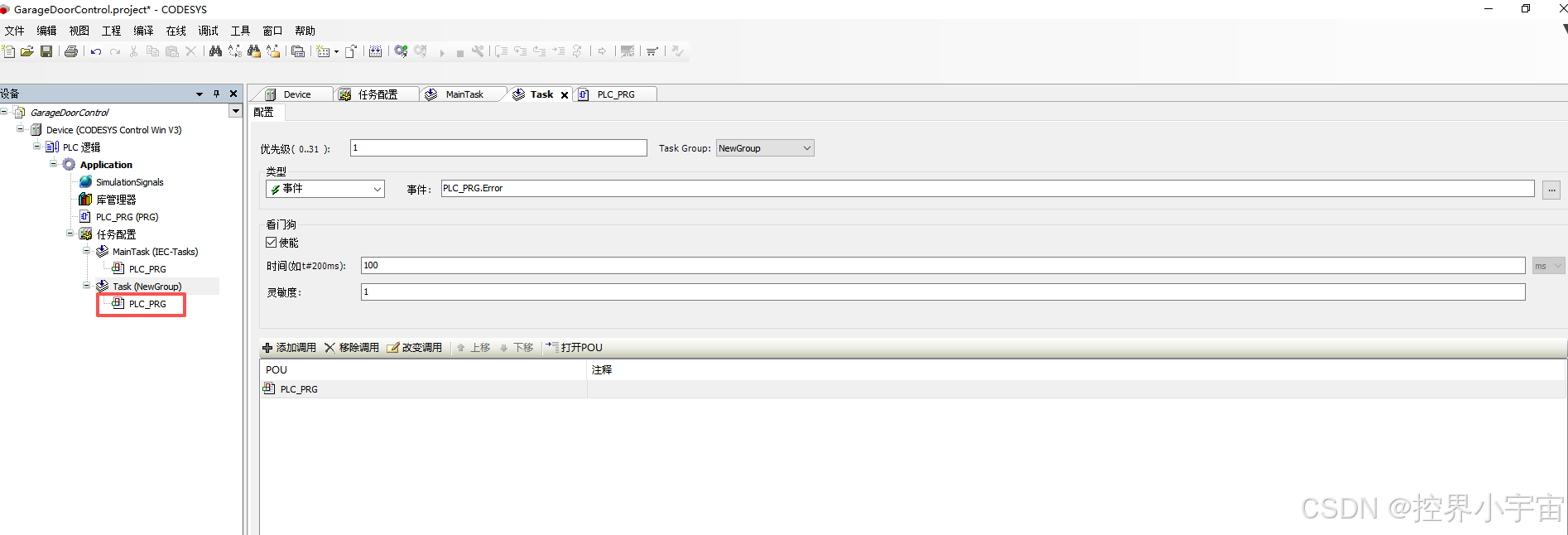
- 关联程序:指定该任务需要执行的程序组织单元(POU),一个任务可关联多个POU,按配置顺序执行;
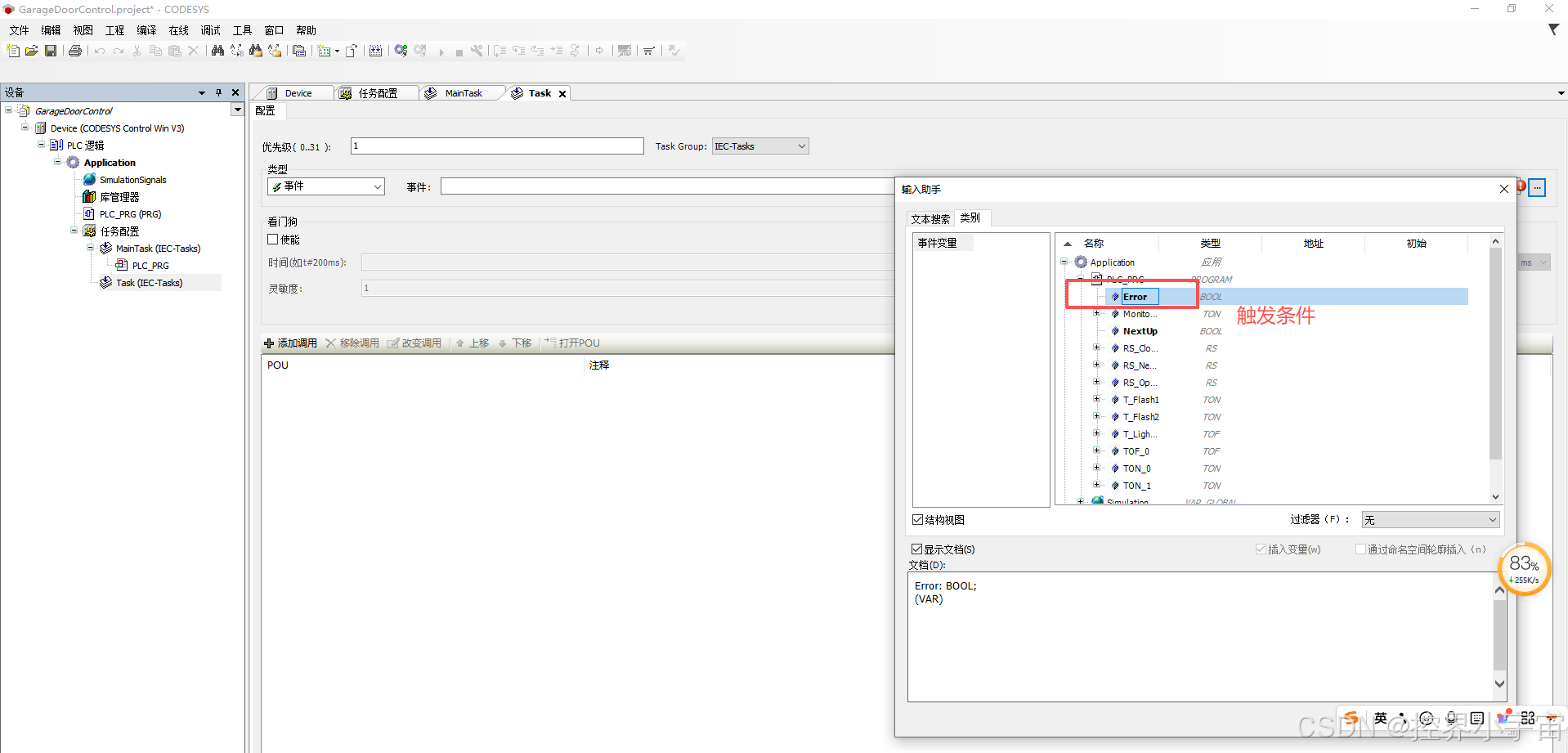
- 触发条件:仅针对事件触发任务,设置触发任务执行的具体事件(如"%IX0.0上升沿""定时器T1溢出"等);
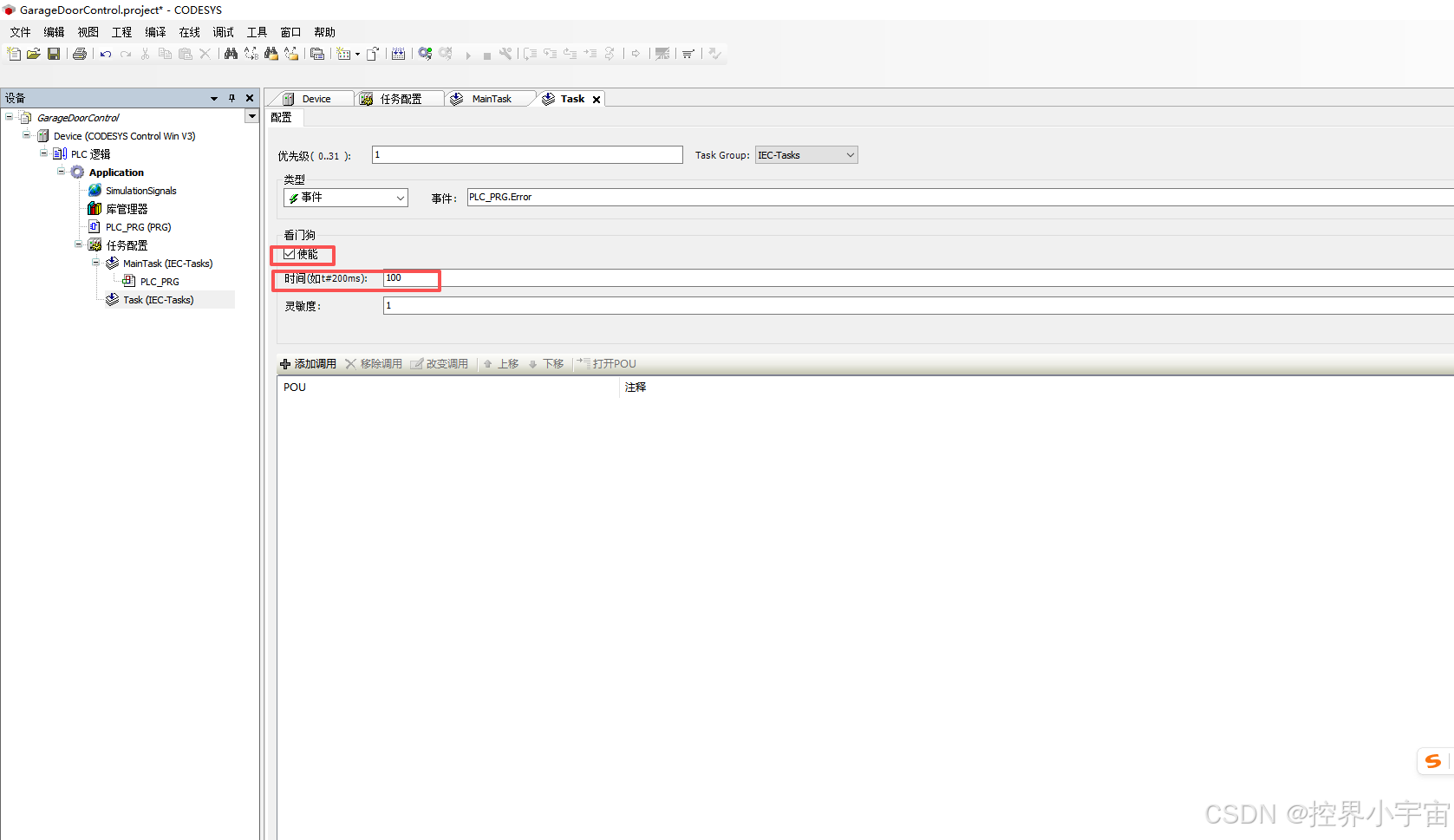
- 看门狗设置:启用看门狗功能后,若任务执行时间超过设定阈值,系统会触发报警或停机,避免程序卡死影响系统安全。看门狗的主要功能是监控程序执行时出现的异常或内部时钟发生的故障。如当系统出现死机或当程序进入死循环时,看门狗计时器就会对系统发出重置信号或停止 PLC当前运行的程序。我们可以形象的将它理解为一只小狗需要主人定时的去给它喂食,如果超过规定的时间没有喂,则他马上就会饿。要配置看门狗,必须定义两个参数,时间和灵明度
3. 任务配置的实操流程
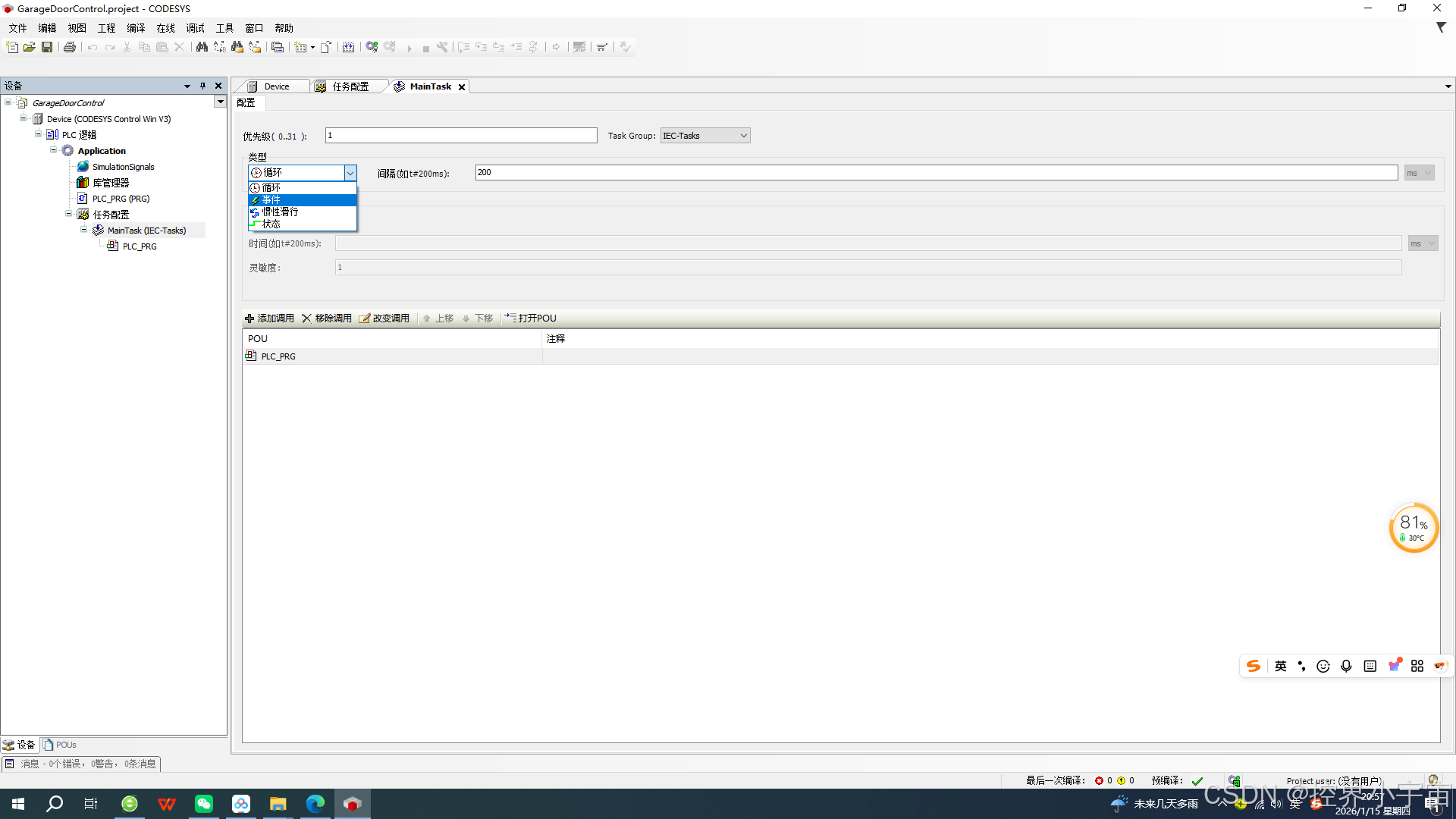
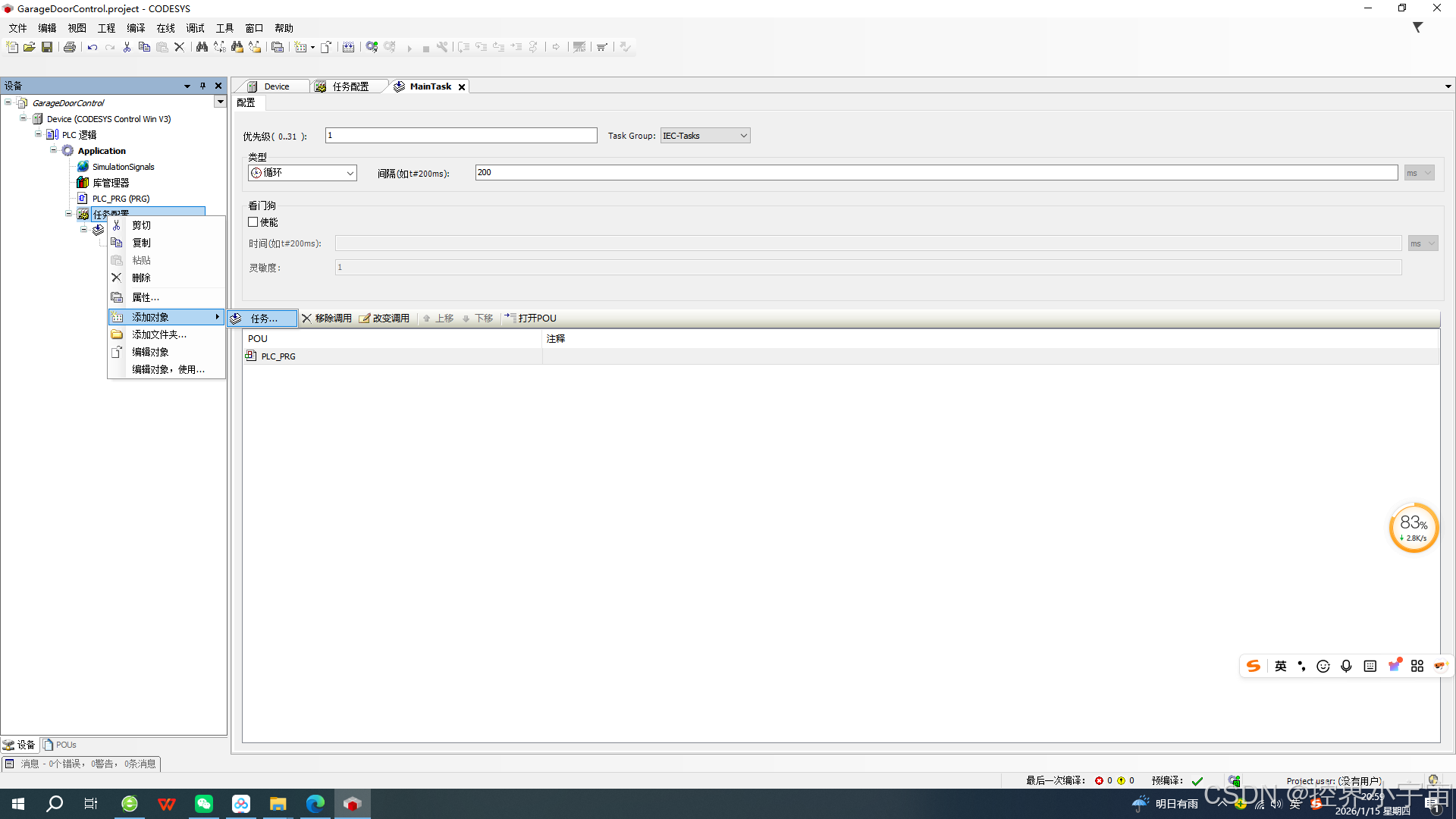
- 打开任务配置:在设备树中找到目标应用节点,展开后右键选择"添加任务",或双击"任务配置"节点进入配置界面;
- 创建任务:点击"新建"按钮,选择任务类型(周期性/事件触发),输入任务名称;
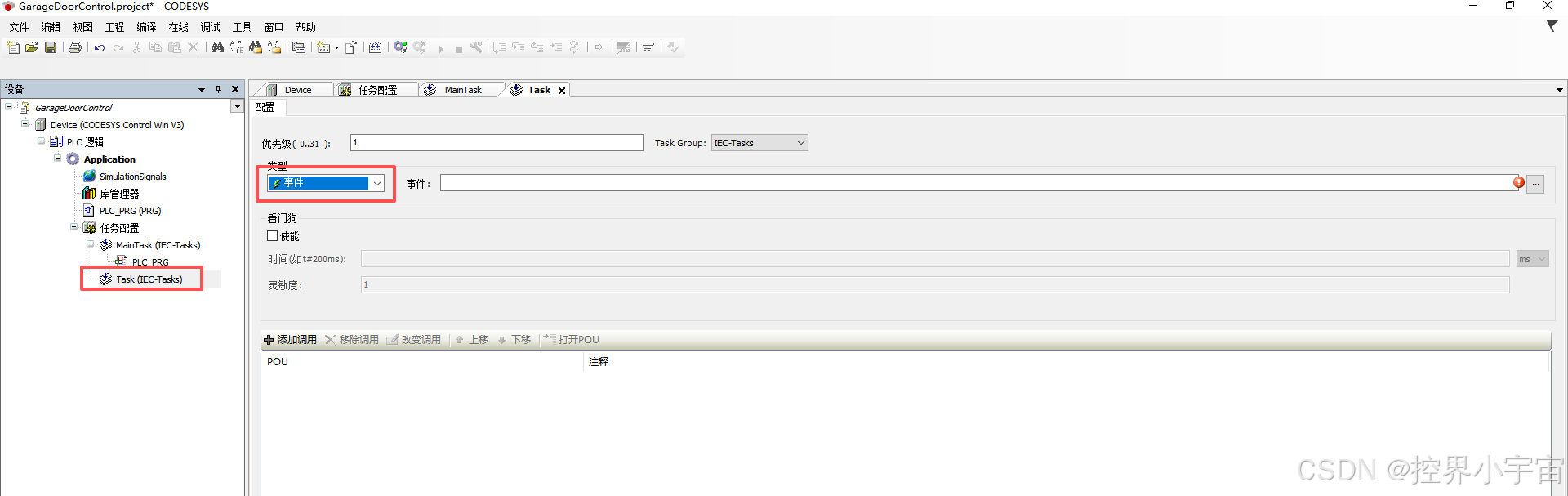
- 设置核心参数:根据任务需求配置执行周期、优先级、触发条件等参数;
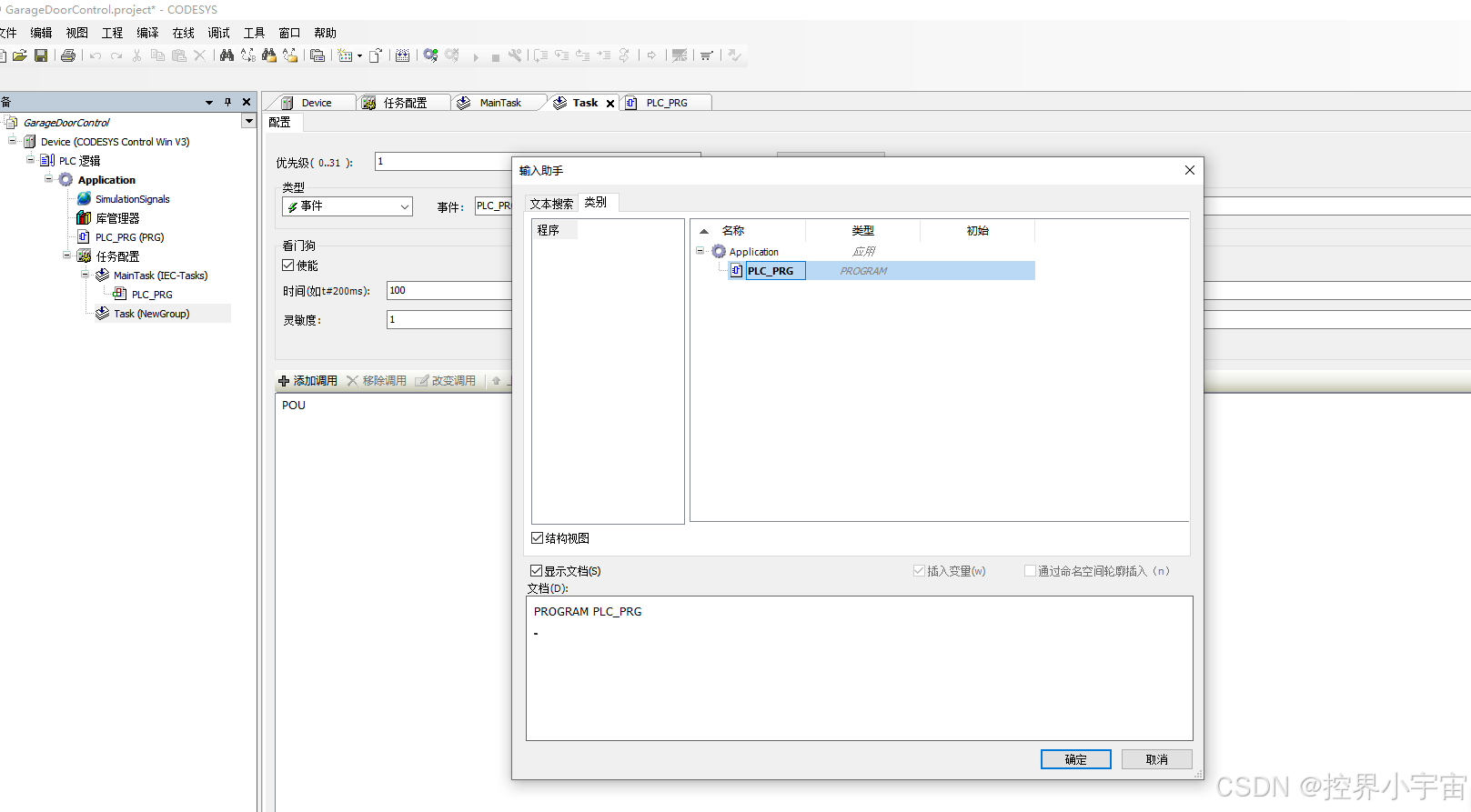
- 关联程序:在任务配置界面的"关联程序"选项卡中,添加需要由该任务执行的POU;
- 保存配置:完成参数设置后点击"确定",保存配置并更新设备树。
提示:多任务配置时,需合理分配优先级和周期,避免高优先级任务频繁占用CPU,导致低优先级任务无法及时执行。建议通过CoDeSys的CPU负载监控功能,优化任务配置。
二、应用对象:程序运行的"功能载体"
应用对象是隶属于应用的核心元素,包括程序组织单元(POU)、全局变量、文本列表等,其中POU是程序逻辑的核心载体,全局变量是应用内数据共享的关键。下面重点讲解POU和全局变量的功能与使用要点。
1. 程序组织单元(POU):程序逻辑的核心单元
POU是CoDeSys编程的核心,用于封装具体的控制逻辑,与软件模型中的"应用"紧密关联------每个POU需隶属于某个应用,通过任务调度执行。根据功能和特性的不同,POU分为功能(Function)、功能块(Function Block)、程序(Program)三类,完全遵循IEC 61131-3标准,确保程序的通用性和可迁移性。
(1)功能(Function):无状态的"计算工具"
功能是无内部状态的POU,核心作用是接收输入参数,经过运算后输出一个确定的结果(支持单个数据或结构体、数组等复合数据)。其关键特性是"输入相同则输出必相同",即使局部变量声明为RETAIN,也不会写入保留区,无法保留状态。
使用要点:
- 声明格式:必须指定返回值类型,格式为"FUNCTION 功能名: 数据类型"(如"FUNCTION F_Add: INT");
- 结果赋值:运算结果必须赋值给功能名(即将功能名作为输出变量);
- 调用方式:可在表达式中作为操作数直接调用,支持IL、ST、FUP等多种IEC标准语言;
- 典型应用:数学运算(如加减乘除、三角函数)、范围校验(如溢出校验、零校验)等无状态逻辑。
(2)功能块(Function Block):带状态的"功能模块"
功能块与功能的核心区别在于"带内部状态",它没有返回值,通过多个输入/输出变量与外部交互,每次调用后的状态会保留到下一次调用。功能块必须通过"实例化"才能调用,每个实例有独立的标识符和数据结构,外部仅能访问其输入/输出变量,无法直接操作内部变量。
使用要点:
- 声明格式:以"FUNCTION_BLOCK"开头,格式为"FUNCTION_BLOCK 功能块名"(如"FUNCTION_BLOCK FB_Timer");
- 实例化:声明实例的格式为"实例名: 功能块名;"(如"fb_TempCtrl: FB_TempCtrl;");
- 调用方式:通过"实例名.变量名"访问输入/输出变量,支持调用时直接赋值(如ST语言:fb_TempCtrl(SetTemp:=25, ActualTemp:=temp););
- 状态保留:若功能块包含RETAIN变量,整个实例会被存储在PLC的保留区,断电后状态不丢失;
- 典型应用:定时器、计数器、PID调节器等需要维持状态的逻辑模块。
(3)程序(Program):全局的"主逻辑载体"
程序是全局的POU,可返回多个值,其状态会保留到下一次运行。程序不能在功能中调用,且无需实例化,直接通过名称调用即可。需要特别注意的是,每个工程默认必须包含一个特殊的程序POU------PLC_PRG,它是单任务程序的主程序,每个控制循环仅调用一次;若工程配置了多任务,则可无需PLC_PRG,由任务直接关联其他程序POU。
使用要点:
- 声明格式:以"PROGRAM"开头,以"END_PROGRAM"结束(如"PROGRAM PLC_PRG ... END_PROGRAM");
- 调用方式:可直接指定输入输出变量(如ST语言:Prg_Main(in_Var:=33, out_Var=>result););
- 状态特性:程序状态在多次调用中持续保留,即使被不同POU调用,状态变化也会延续。
(4)动作(Action):POU的"附加执行逻辑"
动作是可分配给功能块和程序的附加执行逻辑,可使用与主逻辑不同的IEC语言编写,且共享主POU的输入/输出变量和局部变量。调用动作的格式为"程序名.动作名"或"功能块实例名.动作名",在顺序功能图(SFC)中应用广泛,用于实现步的执行逻辑。
2. 全局变量:应用内的数据共享枢纽
全局变量是隶属于应用的变量类型,在整个应用内部的所有POU中均可访问,无需通过参数传递,是应用内数据共享的核心枢纽。全局变量的定义和管理通过设备树的"全局变量"节点完成,支持IEC标准的所有数据类型(如BOOL、INT、REAL),也支持用户自定义的结构体、枚举类型。
全局变量的使用要点:
- 定义位置:在应用节点下的"全局变量"编辑器中定义,格式为"变量名: 数据类型;"(如"g_Temp: REAL; // 全局温度变量");
- 作用域:仅在所属应用内有效,不同应用的全局变量相互独立,若需跨应用共享数据,需通过"访问路径"实现;
- 命名规范:建议添加前缀(如"g_")区分全局变量与局部变量,避免变量名冲突;
- 慎用原则:全局变量的过度使用会增加程序的耦合度,降低可读性和可维护性,建议仅用于必要的数据共享场景(如多POU需访问的公共参数、状态标识等)。
3. 其他常用应用对象
- 文本列表:用于将数值与文本关联(如将"0"映射为"停止","1"映射为"运行"),提升可视化界面的可读性,常用于报警信息、设备状态的显示;
- 参数列表:用于集中管理设备或功能块的参数,方便参数的批量配置和修改,适用于参数较多的复杂系统;
- 报警配置:定义系统的报警类型、触发条件、处理逻辑,实现故障的实时报警和记录,保障系统安全运行。
三、应用对象与任务的协同机制
在CoDeSys软件模型中,应用对象与任务的协同是程序运行的核心逻辑,具体流程如下:
- 应用作为载体,包含全局变量、任务、POU等应用对象;
- 任务通过配置关联特定的POU,定义POU的执行规则(周期、优先级、触发条件);
- PLC运行时,任务调度器根据任务配置,按优先级和触发条件调度任务执行;
- 任务执行时,调用关联的POU,POU通过全局变量或参数传递实现数据交互;
- 多个任务并行执行,实现不同功能模块的同步控制,通过优先级确保关键逻辑优先响应。
示例:某温度控制系统中,"温度采集_100ms"任务关联"F_ReadTemp"功能(采集温度数据),将结果存入全局变量"g_Temp";"温度调节_500ms"任务关联"FB_TempCtrl"功能块,读取"g_Temp"并输出调节信号;"急停处理"事件触发任务关联"Prg_EmergencyStop"程序,确保急停信号触发时优先执行停机逻辑。
四、实操注意事项
- POU的调用规范:功能可嵌套调用,但不可递归调用;功能块必须实例化后调用,避免重复实例化导致资源浪费;
- 任务配置优化:避免多个高优先级任务周期重叠,防止CPU负载过高;关键任务(如急停、故障处理)建议设置最高优先级;
- 变量管理:全局变量需严格命名规范,局部变量仅在必要时使用RETAIN属性,减少保留区占用;
- 兼容性检查:所有POU的编写需遵循IEC 61131-3标准,避免使用专有扩展功能,确保程序可在其他兼容标准的PLC平台上迁移。
本文详细讲解了CoDeSys任务配置与核心应用对象的功能、配置方法及协同机制。任务作为程序执行的"调度核心",决定了程序的运行节奏;POU和全局变量等应用对象作为"功能载体",封装了具体的控制逻辑和数据。掌握两者的协同工作原理,是构建高效、稳定控制系统的关键。后续系列博客将进一步讲解基于软件模型的工程实践案例,帮助你将理论知识转化为实操能力,敬请关注!