本节开始讲解SLAM中另外一个常用的基本知识,绝对位姿约束,这里的绝对位姿是个通用叫法,所谓绝对位姿,即为世界坐标系下的位姿,如再松耦合当中经常使用的激光/视觉/rtk求解的pose跟其它传感器的融合,接下来我们看如何求解这类问题;
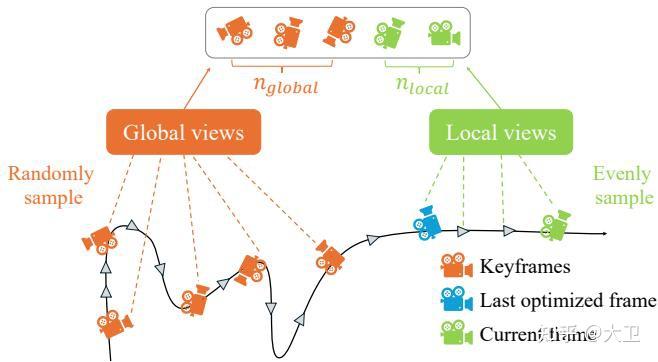
类似上图,当前轨迹,被一个全局观测拉住,这样轨迹漂移就会减少
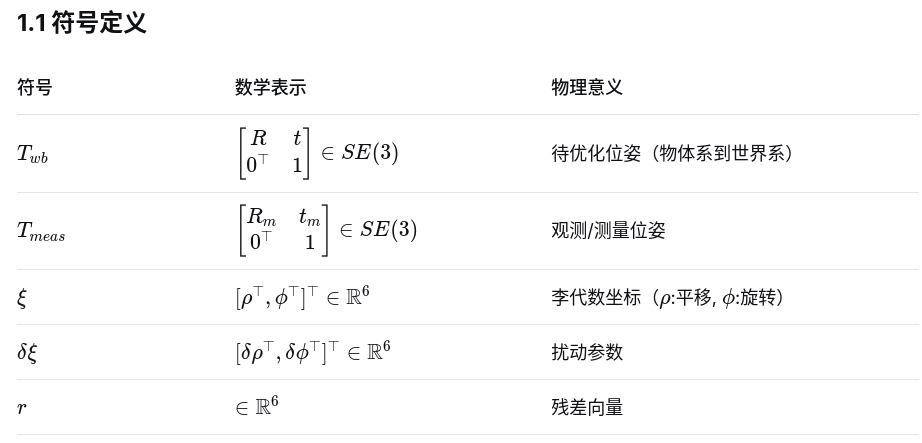
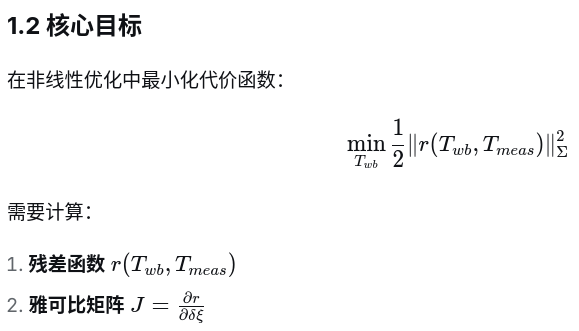
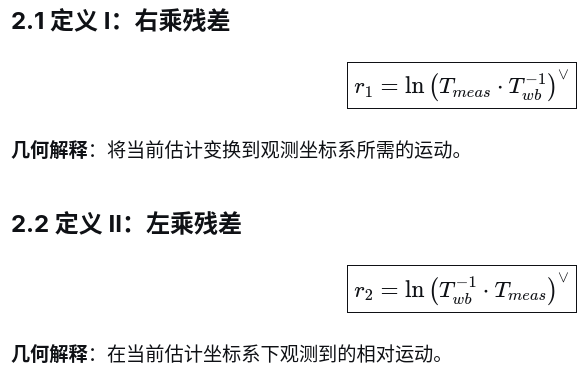
**一.问题描述:**SE(3) 位姿残差与雅可比矩阵推导




上述左右雅克比的关系,可参考本系列博客《SLAM中的非线性优-3D图优化之相对位姿Between Factor左扰动(六)》中附录部分。
总结
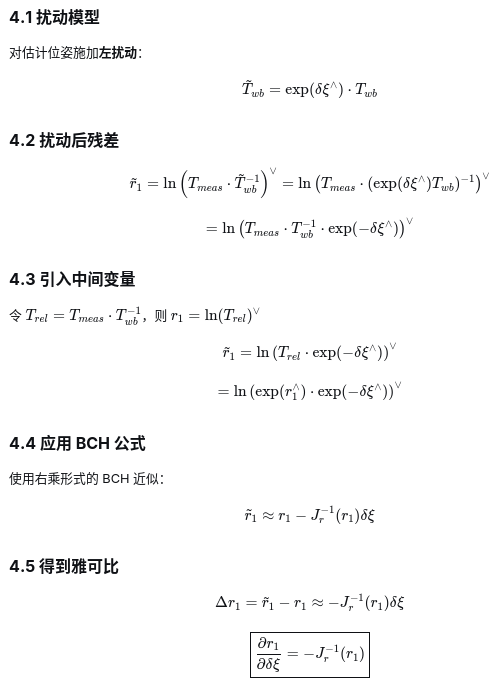
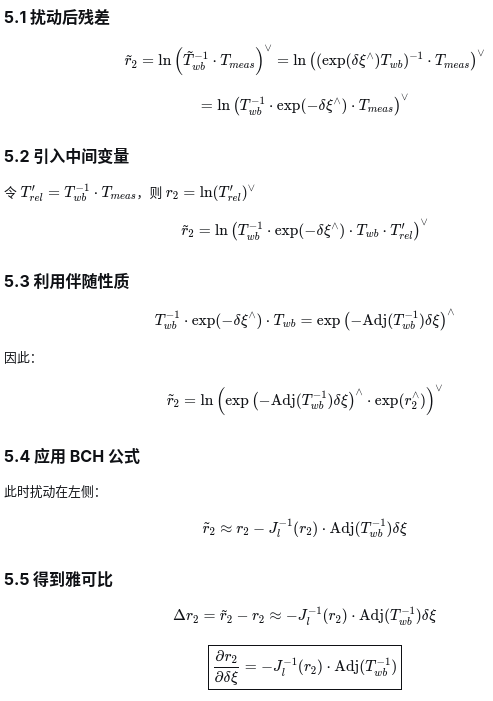
本节推导了左扰动下,绝对位姿的残差跟雅克比,实际上与相对位姿类似,就是构建BCH公式,推导总体上也比较简单;
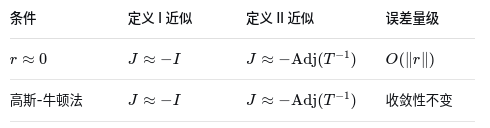
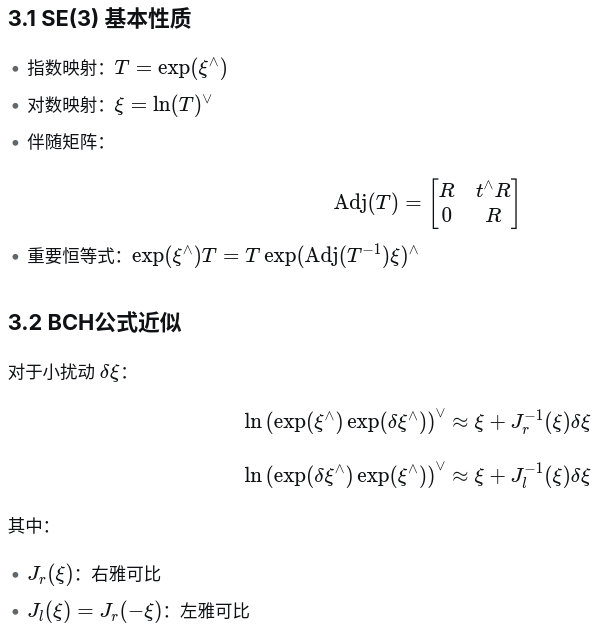
常用近似方案