无人机螺距设计的核心,是在拉力、效率和飞行速度之间找到最佳平衡。你需要先明确无人机的用途,然后针对性地选择桨叶尺寸与螺距,有时还需考虑采用变桨距等高级技术。
螺旋桨核心参数与设计选择
首先是桨叶的关键参数:
直径:指桨叶旋转时划出的圆形直径。
几何螺距:指理论上螺旋桨在固体中旋转一周前进的距离。
弦长:桨叶的宽度。
桨叶数量:常见的有两叶、三叶、四叶。
以下是不同设计因素的平衡与选择要点:

先进螺距技术与设计方法
除了基本选择,还有一些先进技术能显著提升性能:
变桨距技术:允许飞行中改变桨叶角度。相比固定螺距,它能大幅提升控制响应速度、效率和动力失效时的安全性。尤其适合高空长航时太阳能无人机(需适应巨大空气密度变化)和对机动性要求极高的专业机型。
固定螺距的优化设计:即使是固定桨,通过优化翼型、弦长与扭转角分布也能提升效率。例如,有专利通过让桨叶根部能沿轴向小幅摆动,来吸收振动能量,提高寿命和稳定性。
涵道设计:在螺旋桨外加装涵道,可以约束气流、提高气动效率,并增加一部分额外升力。但会增加重量和结构复杂度,需权衡利弊。
螺距设计决策流程
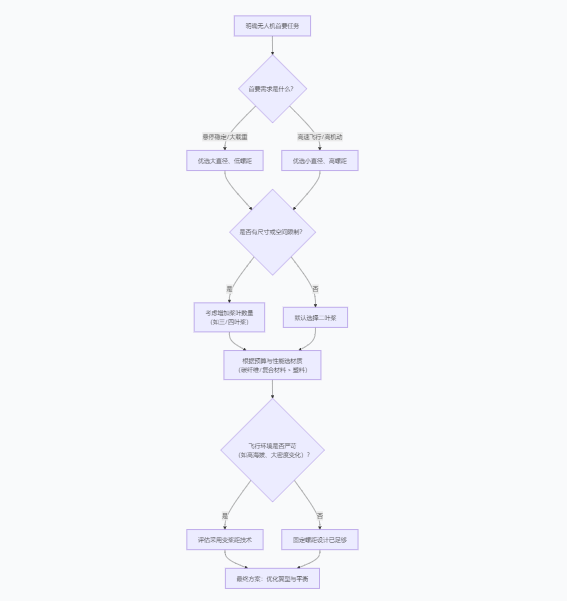
核心要点总结
总结来说,螺距设计的核心在于:
1.任务定义优先:悬停载重选"大径低距",高速竞速选"小径高距"。
2.平衡取舍是关键:直径、螺距、桨叶数相互制约,没有"最好",只有"最合适"。
3.技术按需升级:在固定螺距优化基础上,如有跨越大空域飞行或极致机动性能需求,再考虑变桨距技术。
4.细节决定品质:材料选择和动平衡工艺直接影响可靠性、振动和寿命。
