在传统工业自动化中,机械臂常被编程执行固定路径的重复动作,当传送带上的工件开始以不确定的轨迹和速度运动时,这套固定的程序便难以进行。现代柔性制造与智慧物流的核心挑战之一,正是如何让机械臂具备实时感知与动态响应的能力,精准抓取运动中的目标。机器视觉引导的动态跟随抓取技术,便是解决这一难题的钥匙,它通过构建一个高速闭环的系统,让机械臂化身为能够预判和抓取移动目标的智能体。
一、 动态跟随抓取核心原理
机器视觉引导机械手动态取技术的本质,是建立一个精确且高速的空间信息转换与运动预测模型。其核心在于处理多个坐标系之间的动态关系,系统至少涉及四个关键坐标系,机器人基坐标系、传送带坐标系、视觉坐标系以及动态的物体坐标系。
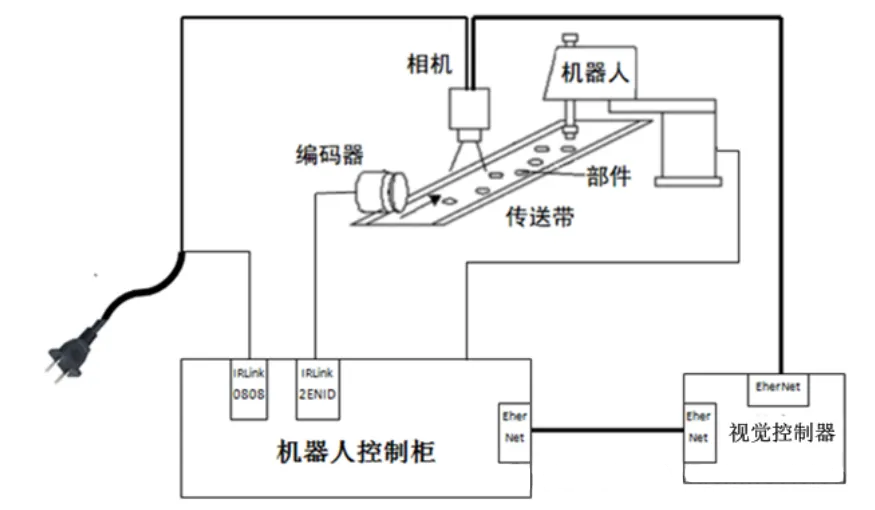
整个过程始于精准的感知。安装在固定位置的工业相机,通过硬件触发方式,在精确的时刻对传送带进行拍照。相机与传送带的相对位置通过标定确定,构成了视觉坐标系。先进的图像处理算法在获取的图像中,快速识别并提取出工件上预先定义的标识或特征,计算出该工件在视觉坐标系下的瞬时二维位置。然而,仅有视觉提供的单帧"快照"是不够的,它无法直接提供工件的连续运动状态。
因此,系统引入了编码器来检测传送带的实时位移。视觉系统将识别到的工件位置,结合编码器反馈的传送带位移量,共同推算出工件在传送带坐标系下的连续运动轨迹。此时,一个虚拟的、随工件一起移动的物体坐标系被建立起来,它精确描述了工件在空间中的位置与朝向。
最终,通过已知的传送带坐标系与机器人基坐标系之间的固定变换关系,系统便能实时计算出动态物体坐标系在机器人世界中的准确位姿。这不仅仅是追踪当前位置,更是通过算法对工件的运动速度和方向进行估计,从而预测其未来的位置,为机械臂规划出一条超前的抓取轨迹。
二、 并行的检测与跟随闭环
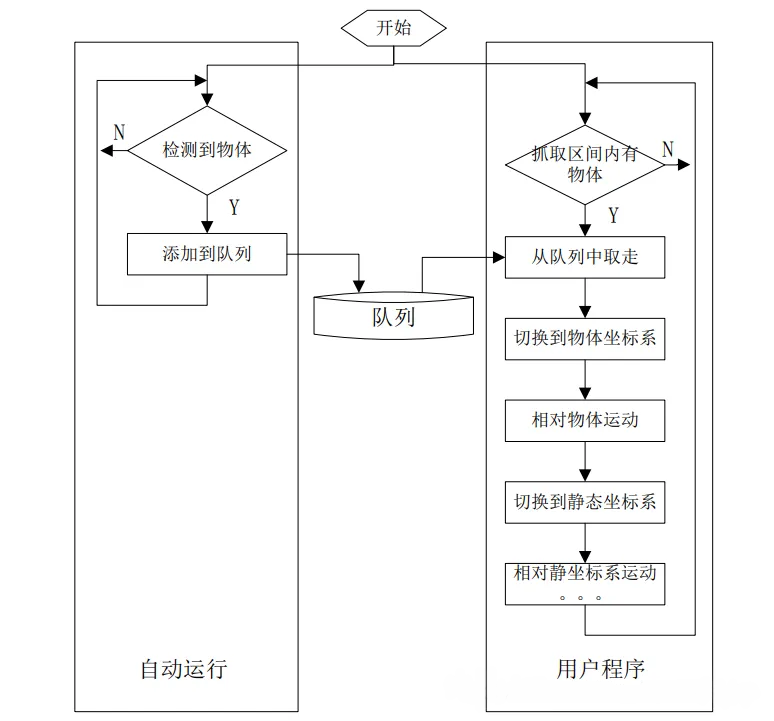
动态跟随抓取并非简单的串行步骤,而是一个高度协同、并行处理的精密闭环。其工作流程可清晰地分为检测与跟随运动两大并行的线程,它们通过共享的数据队列进行无缝衔接。
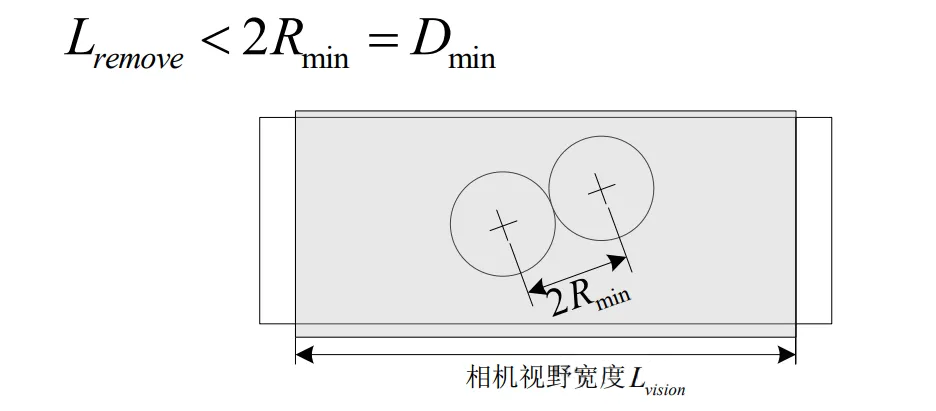
在检测线程中,系统持续运行。视觉系统根据预设的拍照间距周期性地触发拍照。这个间距的设置至关重要,需确保相邻两次拍摄的视野有适当重叠,其宽度需大于工件标识的最大尺寸,以保证每个工件至少能被完整捕获一次,避免漏检。
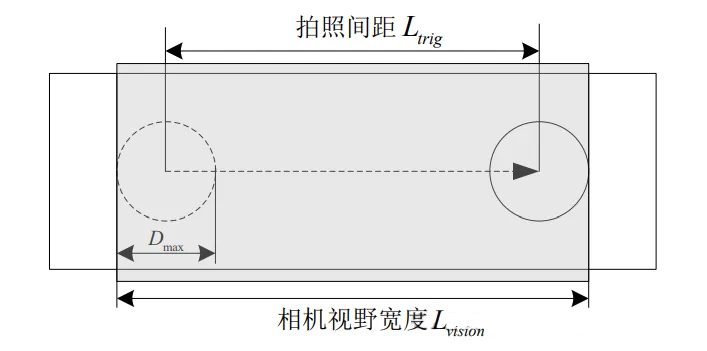
同时,算法会设定一个重复检测判定距离,当同一工件因视野重叠被相邻两次拍摄同时识别时,系统能根据其位置接近程度进行智能去重,确保每个目标在队列中只被记录一次。识别成功的工件,连同其计算出的实时位置、速度矢量以及预设的工件高度参数,被作为一个完整的动态坐标信息包,放入一个先进先出的传送带对象队列中。
与此同时,跟随运动线程独立且同步地运行。机器人控制器不断从队列头部获取最新的目标动态坐标包。基于此,路径规划器不再是计算指向工件当前位置的路径,而是解算一条能够令机械臂末端执行器在未来某一时刻、空间某一点,与运动工件实现速度同步、位置重合的交汇轨迹。
这条轨迹需充分考虑机器人自身的运动学与动力学极限。规划完成后,高响应的伺服控制系统驱动机械臂各轴严格跟随这条动态轨迹。当末端执行器与工件成功交汇并实施抓取后,一个抓取周期完成,系统随即从队列中提取下一个目标,开始新的循环。这种检测与运动的并行化,是实现高节拍、不间断作业的关键。
三、 典型的应用场景
这项技术极大地拓展了工业机器人的应用边界,使其从结构化环境走向非结构化的动态场景,核心解决的是运动中对运动目标的精准作业问题。
最典型的应用是高速流水线的精准分拣与包装。在食品、药品、化妆品包装线上,产品在传送带上高速移动且间距不一。视觉系统快速识别产品类型、颜色或包装缺陷,动态跟随系统则引导高速并联机器人或关节机器人,以极高的节拍对运动中的产品进行分选、装箱或贴标。系统能够处理产品流动的不均匀性,确保操作精度和生产线整体效率。

此外,在物流包裹分拣和光伏板、玻璃板等易碎板材的搬运中,该技术也至关重要。对于物流包裹,系统动态读取面单信息并实时计算抓取点,引导机械臂在包裹不间断运输中将其投入对应格口。对于大型易碎板材,动态跟随技术可实现机械臂与生产线运动的绝对同步,在零相对速度下进行接触和取放,彻底避免了因加速度冲击导致的材料破损。
四、 总结
机器视觉引导的机械手动态跟随抓取技术,通过将实时视觉感知、多坐标系统合与高动态运动控制深度集成,成功赋予了自动化设备在非结构化动态环境中的作业能力。它打破了固定自动化程序的局限,是构建柔性智能制造体系、智慧物流系统的核心技术模块。
未来,这项技术将不仅局限于工业围栏之内,更将向农业自动化采摘、服务机器人乃至特种作业领域渗透,持续推动机器人与物理世界进行更自然、更敏捷、更智能的交互,成为连接数字指令与物理执行的关键桥梁。