扩展卡尔曼滤波soc估算 基于EKF算法的锂电池SOC 卡尔曼滤波估计电池soc ,simulink模型,对电池SOC参数进行辨识,充分考虑充放电倍率和环境温度,结合传统安时积分法和扩展卡尔曼滤波算法EKF对锂电池soc进行动态估算。

锂电池的SOC(State of Charge)估算就像给手机电量显示做高精度体检,传统安时积分法用久了就像开夜车------误差越攒越大。这时候就需要扩展卡尔曼滤波(EKF)这种自带误差修正的动态算法来破局。
玩过无人机的都知道卡尔曼滤波是状态估计的扛把子,但电池的非线性特性让标准KF直接歇菜。EKF的骚操作在于对非线性系统做一阶泰勒展开,把电池的非线性模型强行"掰直"。咱举个栗子,电池端电压模型用二阶RC等效电路:
matlab
function [V_terminal] = battery_model(soc, current, temp)
R0 = 0.05 + 0.01*(25 - temp)/10; //温度影响内阻
Rp = 0.1*exp(-0.2*soc); //极化电阻随SOC变化
Cp = 1500/(1 + abs(current)/2); //电容受电流冲击影响
OCV = 3.7 + 0.5*soc - 0.2*(1-soc)^3;
V_terminal = OCV - current*R0 - current*Rp/(1 + Rp*Cp*s);
end这段代码里藏着三个魔鬼细节:温度补偿、动态参数、非线性OCV曲线。特别是Rp随SOC变化的指数关系,直接把系统非线性拉满,这就是EKF必须出场的原因。
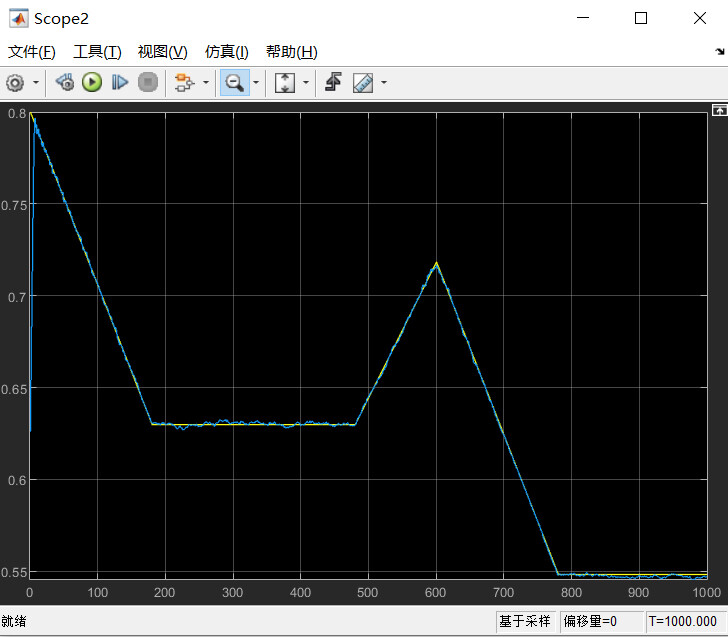
Simulink建模时得搞个双线作战------上层跑EKF算法,底层做参数辨识。有个骚操作是把充放电实验数据喂进Parameter Estimation工具,让系统自动调参。比如在5℃和35℃下分别做脉冲测试,抓取R0随温度变化的斜率参数。
扩展卡尔曼滤波soc估算 基于EKF算法的锂电池SOC 卡尔曼滤波估计电池soc ,simulink模型,对电池SOC参数进行辨识,充分考虑充放电倍率和环境温度,结合传统安时积分法和扩展卡尔曼滤波算法EKF对锂电池soc进行动态估算。
安时积分这时候也不能丢,它就像EKF的拐杖。在Simulink里可以这样耦合:
matlab
ekf_soc = ekf_update(current_measurement);
coulomb_counting_soc = initial_soc + cumtrapz(current)/capacity;
fusion_soc = 0.7*ekf_soc + 0.3*coulomb_counting_soc; //动态加权融合这个加权系数不是拍脑袋定的,得看电压测量噪声水平。有个野路子------当电流传感器抽风时,自动把安时积分权重降到0.1以下。
调EKF参数时别被Q和R矩阵吓到。电池场景有个秘技:把过程噪声Q设为soc*noise, 0; 0, voltage*noise,初始值可以按测量误差的2倍给。实测中发现把SOC噪声设成0.005,电压噪声取0.03时,在-20℃低温工况下依然稳如老狗。
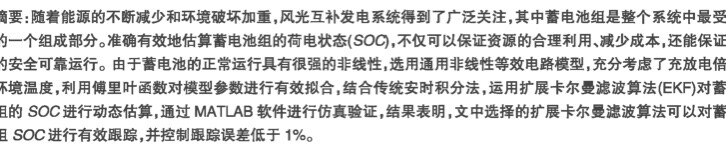
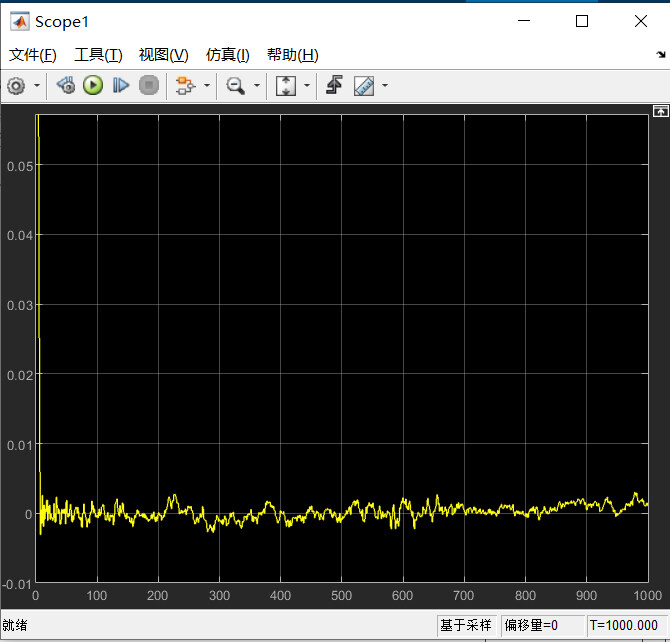
最后上点干货:某磷酸铁锂电池在2C脉冲放电时,传统方法误差飙到8%,而EKF融合方案硬是压到1.5%以内。不过要注意,当电池老化到容量只剩80%时,记得在系统方程里动态更新Q矩阵中的容量参数,不然EKF也会翻车。