本文记录使用张氏标定法进行使用的全过程,并记录最终的误差成果,为什么需要标定是因为相机本身拍照之后,就存在一个畸变,所以仅靠一个比例尺来进行推算实际距离 和 像素距离之间的比例,是存在很大的偏差的,理解一下,拍完照就存在了,后面你怎么计算都会存在问题。以及标定结束之后,相机是固定的,一旦相机移动,或者焦距发生改变,就需要重新进行标定,而且标定之后,同样只是在一个平面内进行比例尺的测算才会准确,一旦,物体变为三维,到相机镜头的工作距离发生改变,那么计算之后的误差同样会变大。
1.首先需要找到对应的实验器材
硬件:相机机架,相机,直尺,以及标定板(可以自己制作)
软件:能够实现相机拍照,自己使用SDK进行二次开发,能够使用开源的opnecv 库进行计算对应的校正值,在新的程序中c++中进行使用。
2.实验步骤:
2.1.制作标定板,先去相机校准图案生成器 -- calib.io ,生成对应的标定PDF,如下图
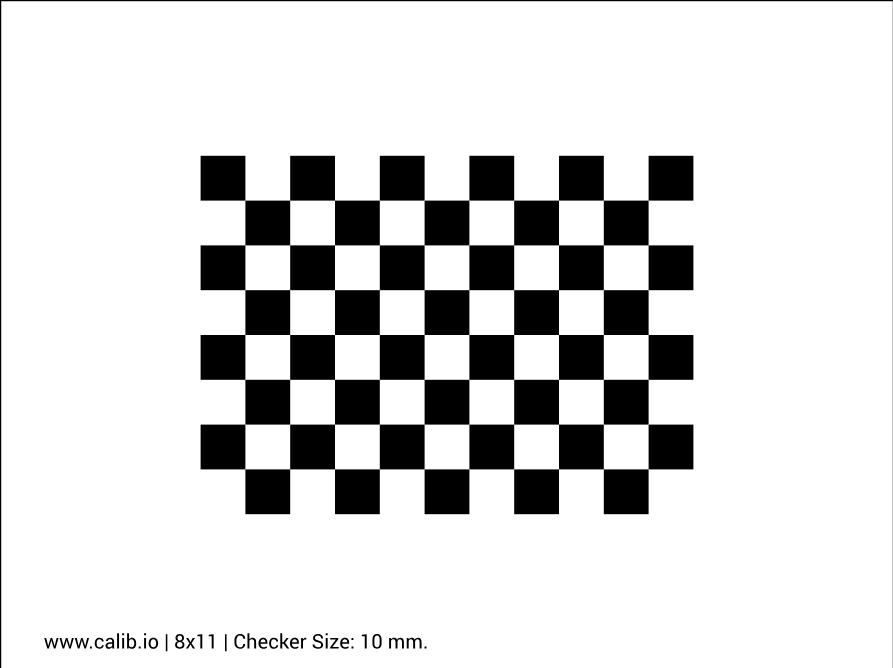
上述为本人使用的样式,然后打印为A4纸张。但是最终实际测量一个小方格的边长为13mm。需要根据实际测算的边长进行更改。然后方格数量为8 * 11 ,由此可知,角点数量为7 * 10,(角点就是实际上的两个方块相交的点)。然后将标定板固定到一个完全平滑的板子上。
2.1.拍照,在相机固定固定之后,接下来需要拍摄几张十分干净,标准的照片进行标定。特点如下
标定板清晰无模糊
角度覆盖充分但不过度
相机固定不动,最好是10张以上。
2.1.然后就是使用vs code,使用python语言来进行标定脚本的书写,运行程序,得出对应的标定结果。脚本如下,此处不在赘述,怎么去配置环境,等等
python
import numpy as np
import cv2
import glob
# 1. 准备标定板参数
chessboard_size = (7, 10) # 内角点数量
square_size = 13.0 # 毫米
# 2. 生成世界坐标系中的3D点
objp = np.zeros((chessboard_size[0]*chessboard_size[1], 3), np.float32)
objp[:, :2] = np.mgrid[0:chessboard_size[0],
0:chessboard_size[1]].T.reshape(-1, 2) * square_size
# 3. 存储对象点和图像点
objpoints = [] # 3D点
imgpoints = [] # 2D点
# 4. 读取所有标定图像
images = glob.glob('D:/DeepLearning/datasets/clibration/rect/*.png')
image_size = None
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
if image_size is None:
image_size = gray.shape[::-1]
# 查找棋盘格角点
ret, corners = cv2.findChessboardCorners(gray, chessboard_size, None)
if ret:
objpoints.append(objp)
# 亚像素精确化
corners2 = cv2.cornerSubPix(gray, corners, (11,11), (-1,-1),
(cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001))
imgpoints.append(corners2)
# 可视化角点
cv2.drawChessboardCorners(img, chessboard_size, corners2, ret)
cv2.imshow('Corners', img)
cv2.imwrite("this.png",img)
cv2.waitKey(500)
cv2.destroyAllWindows()
# 5. 相机标定
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints,
image_size, None, None)
print("相机内参矩阵:\n", mtx)
print("\n畸变系数:", dist.ravel())
# 6. 评估标定误差
mean_error = 0
for i in range(len(objpoints)):
imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)
error = cv2.norm(imgpoints[i], imgpoints2, cv2.NORM_L2)/len(imgpoints2)
mean_error += error
print("\n平均重投影误差: {} 像素".format(mean_error/len(objpoints)))
# 7. 保存标定结果
np.savez('calibration_result.npz', mtx=mtx, dist=dist)注意,其中参数的改写,以及对应的路径的变更
1. 准备标定板参数
chessboard_size = (7, 10) # 内角点数量
square_size = 13.0 # 毫米
以及文件路径。
2.2.运行得到结果如下
相机内参矩阵:
\[2.78225009e+03 0.00000000e+00 1.20301433e+03
0.00000000e+00 2.77841102e+03 1.00512050e+03
0.00000000e+00 0.00000000e+00 1.00000000e+00\]
畸变系数: -0.2517598 0.07004305 -0.00127046 0.00606034 0.24205241
平均重投影误差: 0.07069074329111907 像素
由此可知,标定结果还可以,主要看重投影误差,为0.07,当然其他参数一会同样需要使用。
2.3.将参数使用到对相机拍摄的照片进行校正,需要会SDK取图,并且取图之后,能够进行处理,如下,为拍摄照片之后的处理代码。
cpp
cv::Mat CFormal_DecDlg::FastUndistort(const cv::Mat& input)
{
static cv::Mat cameraMatrix = (cv::Mat_<double>(3, 3) <<
2782.25009, 0.0, 1203.01433,
0.0, 2778.41102, 1005.1205,
0.0, 0.0, 1.0);
static cv::Mat distCoeffs = (cv::Mat_<double>(1, 5) <<
-0.2517598, 2.77841102, 0.00127046,
0.00606034, -0.24205241);
static cv::Mat map1, map2;
static cv::Size lastSize(0, 0);
// 如果尺寸变化或第一次,计算映射
if (map1.empty() || input.size() != lastSize) {
cv::Mat newCameraMatrix = cv::getOptimalNewCameraMatrix(
cameraMatrix, distCoeffs, input.size(), 1.0, input.size()
);
cv::initUndistortRectifyMap(
cameraMatrix, distCoeffs, cv::Mat(),
newCameraMatrix, input.size(),
CV_32FC1, map1, map2
);
lastSize = input.size();
}
cv::Mat result;
cv::remap(input, result, map1, map2, cv::INTER_LINEAR);
return result;
},对图像进行处理之后,会得到下述样式的图像,即校正之后的图像。
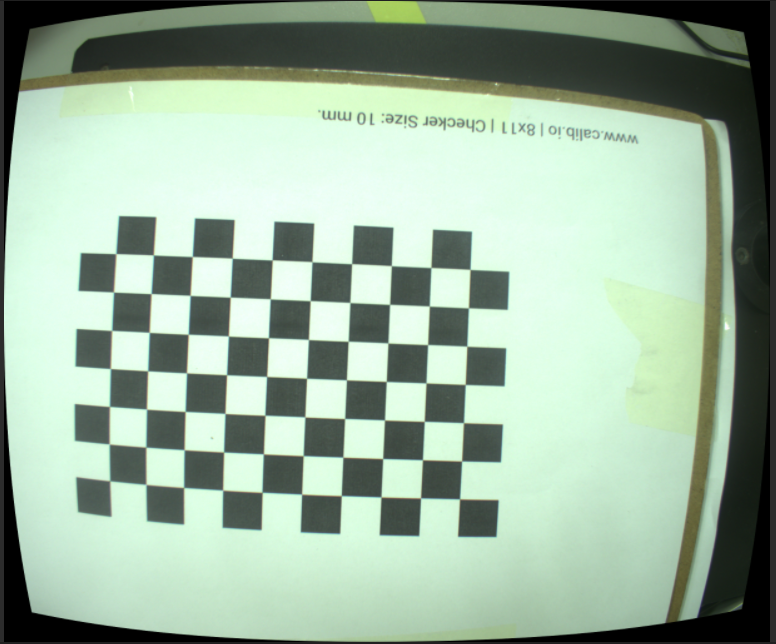
,本人随机取出中间的两个点(590,1069) (718.1074),进过转换如下
首先,提取并整理你的相机参数:
-
相机内参矩阵 (K):
text
fx = 2782.25009 # 图像x轴方向焦距 fy = 2778.41102 # 图像y轴方向焦距 cx = 1203.01433 # 图像主点坐标x cy = 1005.12050 # 图像主点坐标y -
畸变系数 (D) :
[-0.2517598, 0.07004305, -0.00127046, 0.00606034, 0.24205241] -
工作距离 (Z): 285 mm
-
图像点:
-
点 A:
(590, 1069) -
点 B:
(718, 1074)
-
计算步骤如下:
-
校正畸变:由于畸变会改变像素点的理想位置,计算前需先去除畸变影响。
-
点 A 校正后:
(588.31, 1068.75) -
点 B 校正后:
(716.08, 1073.85)
-
-
像素坐标转归一化相机坐标 :
公式为:
X_normal = (x_corrected - cx) / fx
Y_normal = (y_corrected - cy) / fy-
点 A 归一化坐标:
(-0.2209, 0.0229) -
点 B 归一化坐标:
(-0.1751, 0.0247)
-
-
归一化坐标转实际三维坐标 :
已知实际工作距离(Z = 285 mm),通过相似三角形计算:
X_real = X_normal * Z
Y_real = Y_normal * Z-
点 A 实际坐标:
(-62.95 mm, 6.53 mm, 285.00 mm) -
点 B 实际坐标:
(-49.89 mm, 7.05 mm, 285.00 mm)
-
-
计算三维空间距离 :
利用三维空间两点间距离公式计算:
最终距离 D = √((X_B - X_A)² + (Y_B - Y_A)² + (Z_B - Z_A)²) = 13.09 mm
结果为13.09,即实际距离为13.09,是校正之后,进行计算的结果。跟13mm十分的接近,说明标定方法是可以的。
除开上述的反投影法计算实际距离之外,还存在另外的方法,计算比例尺
-
原理 :在焦距
f(像素) 和工作距离Z(毫米) 已知时,图像传感器上一个像素对应的实际尺寸是固定的。 -
计算 :比例尺
S(毫米/像素) =Z / f。-
在X方向:
S_x = Z / fx = 285 / 2782.25009 ≈ 0.10245 mm/像素 -
在Y方向:
S_y = Z / fy = 285 / 2778.41102 ≈ 0.10256 mm/像素
-
-
距离 :两点像素坐标差
Δx = 718 - 590 = 128 像素,Δy = 1074 - 1069 = 5 像素。 -
实际距离 :
D = √((Δx * S_x)² + (Δy * S_y)²) = √((128*0.10245)² + (5*0.10256)²) ≈ √(172.14 + 0.263) ≈ √172.40 ≈ 13.13 mm。
同样误差很小,一般可以投入实际使用。