小编2026 Spring 预计开启一段关于Robotics的学习,本文记录了在 Windows 系统上配置 Isaac Lab 环境的完整过程,包括所有使用的命令、详细步骤以及遇到的问题和解决方案。

目录
环境要求
在开始之前,请确保您的系统满足以下要求:
- 操作系统: Windows 10/11
- Python 版本: Python 3.11(Isaac Sim 5.X 必需)
- GPU: NVIDIA GPU(推荐,用于 CUDA 加速)
- 磁盘空间: 至少 20GB 可用空间
- 网络: 稳定的网络连接(
⚠️ 重要提示:
- Isaac Sim 5.X 需要 Python 3.11
- Isaac Sim 4.5 需要 Python 3.10
- 其他 Python 版本不兼容
安装步骤
步骤 1: 安装 Python 3.11
首先需要安装 Python 3.11。有多种方法:
从官网下载(推荐)
- 访问 Python 官网
- 下载 Python 3.11.x 版本
- 重要: 安装时务必勾选 "Add Python to PATH"
验证安装
powershell
# 检查 Python 版本
python --version
# 或
py -3.11 --version
# 查看所有已安装的 Python 版本
py -0步骤 2: 启用 Windows 长路径支持
这是非常重要的一步! Isaac Sim 的某些文件路径会超过 Windows 默认的 260 字符限制,必须启用长路径支持。小编在这里使用了方法1。
方法 1: 使用注册表编辑器(推荐)
-
按
Win + R,输入regedit打开注册表编辑器 -
导航到:
HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Control\FileSystem -
找到或创建
LongPathsEnabled项(DWORD 类型) -
将值设置为
1 -
重启计算机(必须重启才能生效)
方法 2: 使用 PowerShell(需要管理员权限)
powershell
# 以管理员身份运行 PowerShell
New-ItemProperty -Path "HKLM:\SYSTEM\CurrentControlSet\Control\FileSystem" -Name "LongPathsEnabled" -Value 1 -PropertyType DWORD -Force然后重启计算机。
方法 3: 使用批处理脚本
batch
# 以管理员身份运行
reg add "HKLM\SYSTEM\CurrentControlSet\Control\FileSystem" /v LongPathsEnabled /t REG_DWORD /d 1 /f验证是否已启用
重启后,在 PowerShell 中运行:
powershell
reg query "HKLM\SYSTEM\CurrentControlSet\Control\FileSystem" /v LongPathsEnabled如果显示 0x1,说明已成功启用。
步骤 3: 创建虚拟环境
使用 Python 3.11 创建虚拟环境:
powershell
# 方法 1: 使用 py launcher
py -3.11 -m venv env_isaaclab
# 方法 2: 如果 python3.11 在 PATH 中
python3.11 -m venv env_isaaclab创建完成后,激活虚拟环境:
powershell
# Windows PowerShell
.\env_isaaclab\Scripts\Activate.ps1
# Windows CMD
env_isaaclab\Scripts\activate.bat如果 PowerShell 执行策略限制,需要先运行:
powershell
Set-ExecutionPolicy -ExecutionPolicy RemoteSigned -Scope CurrentUser步骤 4: 更新 pip
激活虚拟环境后,更新 pip 到最新版本:
powershell
python -m pip install --upgrade pip验证 pip 版本:
powershell
python -m pip --version步骤 5: 安装 Isaac Sim
5.1 安装 Isaac Sim pip 包
这是最耗时的步骤,可能需要 20-40 分钟,请耐心等待:
powershell
pip install "isaacsim[all,extscache]==5.1.0" --extra-index-url https://pypi.nvidia.com参数说明:
isaacsim[all,extscache]==5.1.0: 安装 Isaac Sim 5.1.0 完整版本,包含所有扩展和缓存--extra-index-url https://pypi.nvidia.com: 指定 NVIDIA 的 PyPI 镜像源
5.2 安装 PyTorch(CUDA 版本)
根据您的系统架构安装对应的 PyTorch:
Windows (x86_64):
powershell
pip install -U torch==2.7.0 torchvision==0.22.0 --index-url https://download.pytorch.org/whl/cu124Linux (x86_64):
bash
pip install -U torch==2.7.0 torchvision==0.22.0 --index-url https://download.pytorch.org/whl/cu124验证 PyTorch 和 CUDA:
python
python -c "import torch; print(f'PyTorch: {torch.__version__}'); print(f'CUDA available: {torch.cuda.is_available()}')"步骤 6: 验证 Isaac Sim 安装
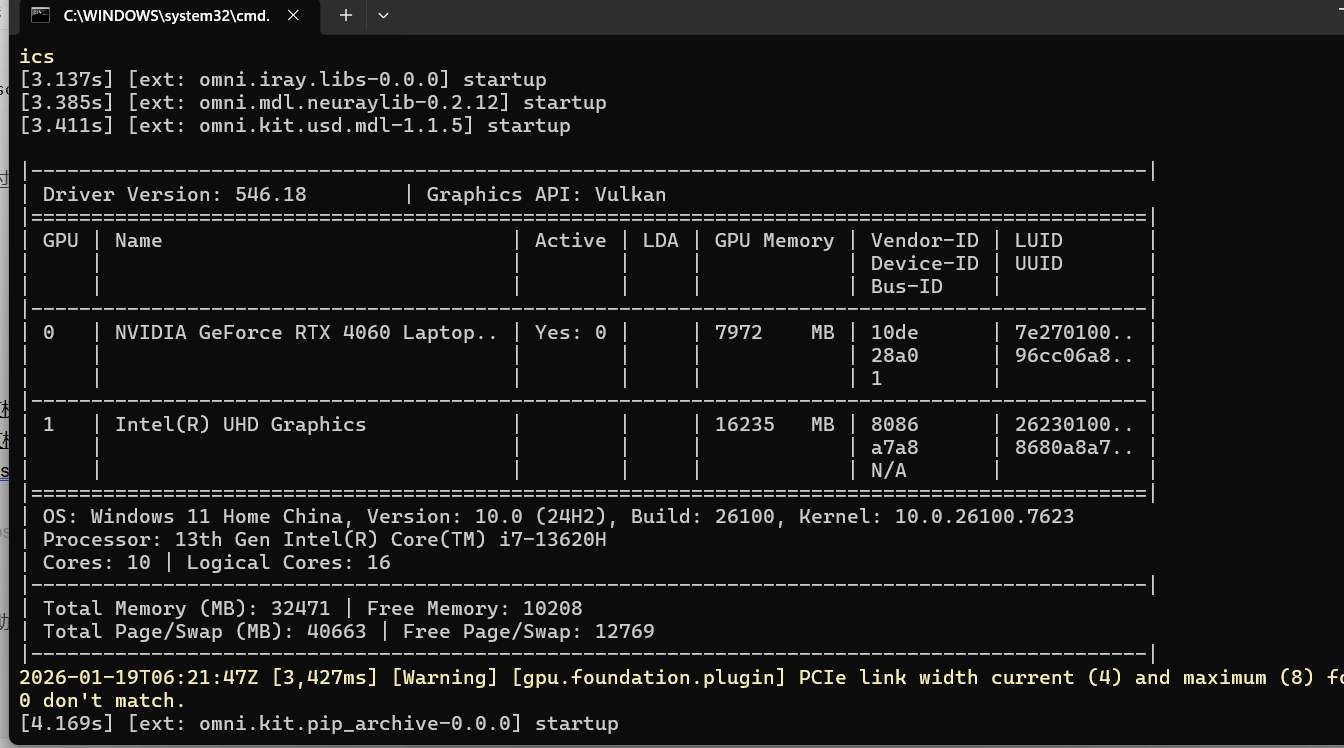
运行以下命令验证 Isaac Sim 是否安装成功:
powershell
isaacsim首次运行提示:
- 首次运行时会提示接受 NVIDIA Omniverse 许可协议(EULA)
- 在提示处输入
Yes即可 - 首次运行需要提取扩展,可能需要 10 分钟,这是正常的
- 扩展提取后,后续运行会使用缓存,速度会快很多
如果看到 Isaac Sim 界面,说明安装成功!
步骤 7: 克隆 Isaac Lab 仓库
使用 Git 克隆 Isaac Lab 仓库:
powershell
# 使用 HTTPS(推荐)
git clone https://github.com/isaac-sim/IsaacLab.git
# 或使用 SSH(如果已配置)
git clone git@github.com:isaac-sim/IsaacLab.git
# 进入目录
cd IsaacLab步骤 8: 安装 Isaac Lab
在 IsaacLab 目录下,使用 isaaclab.bat 工具安装:
8.1 安装所有框架(推荐)
powershell
# Windows
isaaclab.bat --install all
# 或简写
isaaclab.bat -i all这会安装:
- Isaac Lab 核心扩展
- 所有强化学习框架(rl_games, rsl_rl, sb3, skrl)
8.2 仅安装特定框架
powershell
# 仅安装 rl_games
isaaclab.bat --install rl_games
# 不安装任何学习框架
isaaclab.bat --install none8.3 安装依赖项(仅 Linux)
如果在 Linux 上,需要先安装系统依赖:
bash
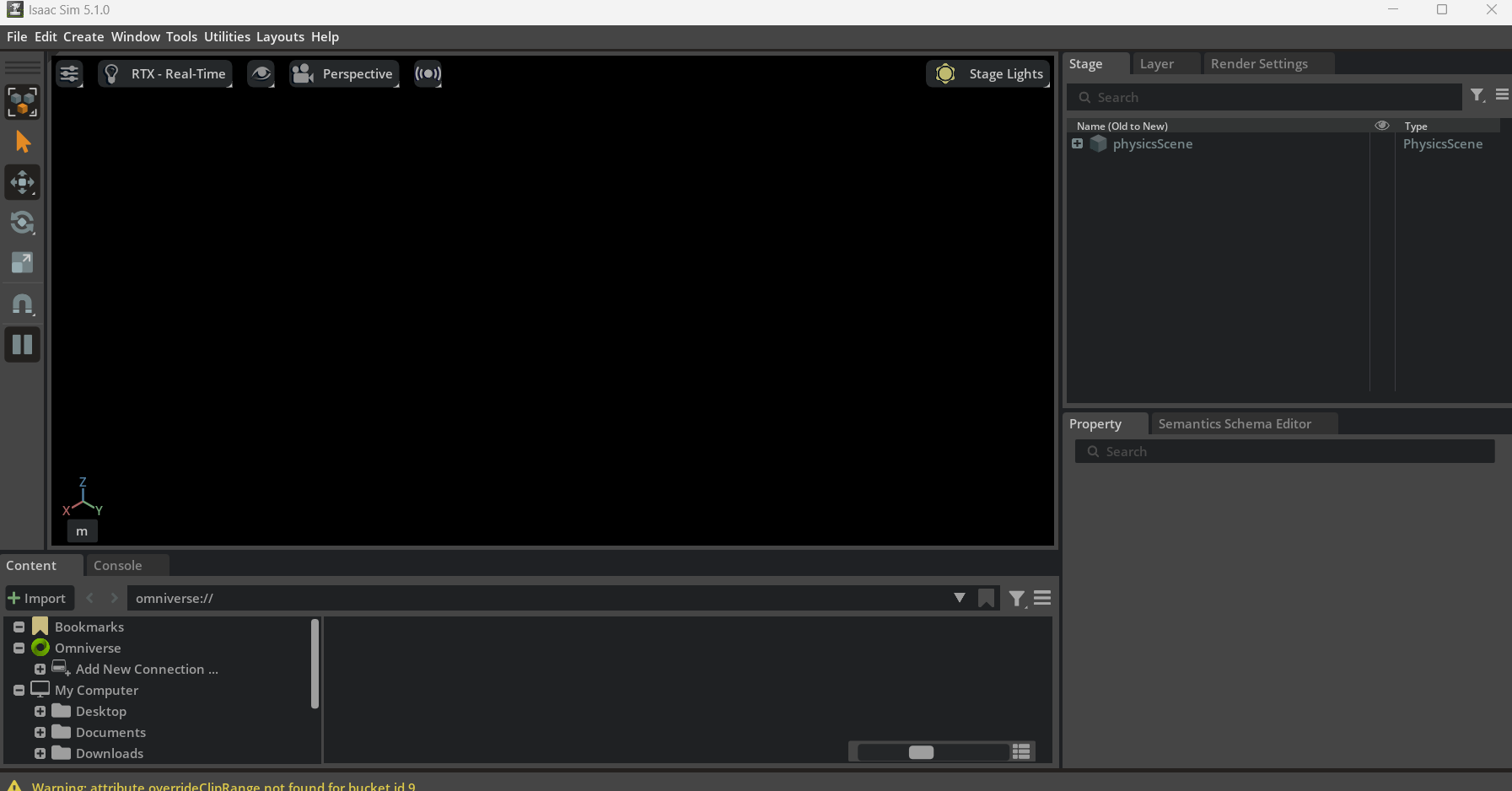
sudo apt install cmake build-essential步骤 9: 验证 Isaac Lab 安装
运行验证脚本确认安装成功:
powershell
# 在 IsaacLab 目录下
isaaclab.bat -p scripts\tutorials\00_sim\create_empty.py预期结果:
- 应该启动仿真器,显示一个带黑色视口的窗口
- 如果看到黑色视口窗口,说明安装成功!
退出方式:
- 在终端按
Ctrl+C退出 - Windows 上也可以按
Ctrl+Break或Ctrl+fn+B
遇到的问题及解决方案
问题 1: Windows 长路径限制错误
错误信息:
ERROR: Could not install packages due to an OSError: [WinError 206] 文件名或扩展名太长原因: Windows 默认限制文件路径长度为 260 个字符,Isaac Sim 的某些文件路径超过了这个限制。
解决方案 :
按照 [步骤 2](#步骤 2) 启用 Windows 长路径支持,并重启计算机。
验证:
powershell
reg query "HKLM\SYSTEM\CurrentControlSet\Control\FileSystem" /v LongPathsEnabled问题 2: Python 版本不兼容
错误信息:
ERROR: This package requires Python 3.11原因: Isaac Sim 5.X 严格要求 Python 3.11,其他版本不兼容。
解决方案:
-
安装 Python 3.11(参考步骤 1)
-
使用 Python 3.11 创建虚拟环境:
powershellpy -3.11 -m venv env_isaaclab
验证安装
完成所有安装步骤后,运行以下命令进行完整验证:
1. 检查 Python 环境
powershell
python --version
# 应该显示: Python 3.11.x2. 检查 Isaac Sim
powershell
isaacsim --help3. 检查 PyTorch 和 CUDA
python
python -c "import torch; print(f'PyTorch: {torch.__version__}'); print(f'CUDA available: {torch.cuda.is_available()}'); print(f'CUDA version: {torch.version.cuda if torch.cuda.is_available() else \"N/A\"}')"4. 检查 Isaac Lab
powershell
cd IsaacLab
isaaclab.bat -p scripts\tutorials\00_sim\create_empty.py如果所有检查都通过,恭喜您,环境配置成功!
参考资源
希望这篇指南能帮助您顺利配置 Isaac Lab 环境!如果遇到其他问题,欢迎在评论区讨论。