一、查找的基本概念(基础必懂)
✅ 查找的定义
- 在一个给定的数据集合中,找出满足某种条件的元素的过程。
- 每个元素都有一个关键字(Key),用于比较和定位。
✅ 分类方式
| 类型 | 特点 |
|---|---|
| 静态查找 | 查找过程中数据不变化,只支持查找操作 → 如顺序表、索引表 |
| 动态查找 | 支持插入、删除、查找操作 → 如二叉排序树、哈希表 |
✅ 效率指标:平均查找长度(ASL)
- ASL = 所有查找路径长度之和 / 总查找次数
- 查找成功 ASL:找到目标元素时的平均比较次数
- 查找失败 ASL:未找到时的平均比较次数
💡 考点:计算不同查找方法的 ASL
二、线性结构查找(重点掌握)
✅ (一)顺序查找
📌 算法思想:
- 从第一个元素开始,逐个比较,直到找到或遍历完
📌 步骤:
cpp
typedef struct { // 查找表的顺序结构(顺序表)
ElemType *elem; // 动态数组基址
int TableLen; // 表的长度
} SSTable;
int Search_Seq(SSTable ST, ElemType key) {
ST.elem[0] = key; // 哨兵
int i;
for(i = ST.TableLen; ST.elem[i] != key; i--); // 从后往前找
return i; // 若查找成功,则返回元素下标,查找失败则返回0
}📌 时间复杂度:
- 最坏:O(n)
- 平均:ASL = (n+1)/2
📌 适用场景:
- 无序表、小规模数据
✅ 优点 :简单,无需排序
❌ 缺点:效率低
✅ (二)折半查找(二分查找)
📌 前提条件:
- 有序表(升序或降序)
📌 算法思想:
- 每次比较中间元素,根据大小决定在左半部分还是右半部分继续查找
📌 步骤:
cpp
typedef struct { // 查找表的顺序结构(顺序表)
ElemType *elem; // 动态数组基址
int TableLen; // 表的长度
} SSTable;
int Binary_Search(SSTable L, ElemType key) {
int low = 0;
int high = L.TableLen - 1;
int mid;
while(low <= high) {
mid = (low + high) / 2; // 取中间位置
if(key > L.elem[mid]) {
low = mid + 1; // 从后半部分继续查找
} else if(key < L.elem[mid]) {
high = mid - 1; // 从前半部分继续查找
} else {
return mid; // 查找成功则返回所在位置
}
}
return -1; // 查找失败,返回-1
}📌 时间复杂度:
- 查找成功 ASL ≈
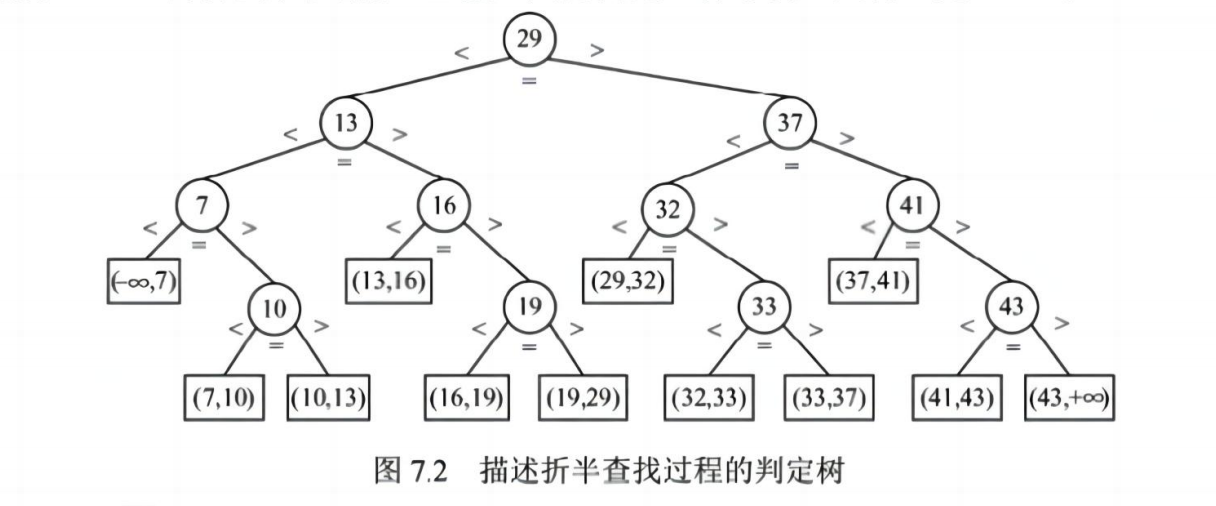
📌 构造判定树:
- 将查找过程画成一棵二叉树,每个节点为比较值
- 叶子节点表示查找失败位置
💡 考点:手写折半查找过程、构造判定树、计算 ASL
✅ (三)分块查找
📌 思想:
- 将有序表分为若干块,每块内无序,但块间有序
- 先在块索引中用折半查找确定目标块,再在块内顺序查找
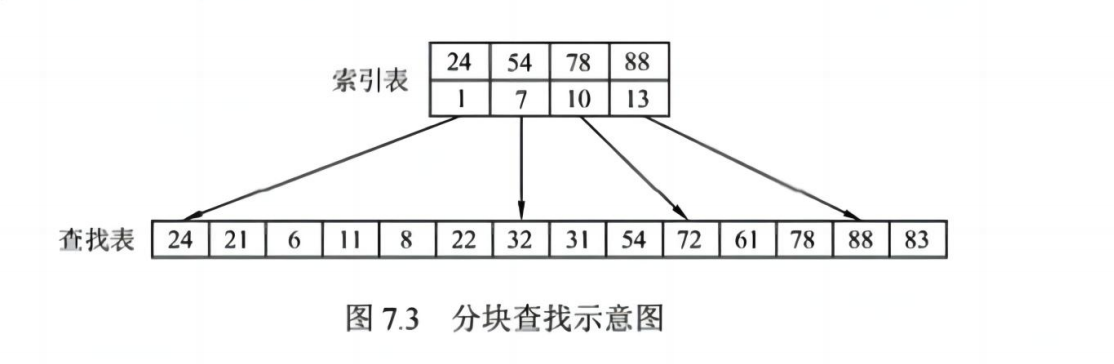
📌 步骤:
- 在索引表中折半查找目标块
- 在该块内顺序查找
📌 时间复杂度:
- 块数
,每块约
✅ 优点 :比顺序查找快,比折半查找灵活
❌ 缺点:需要额外空间存储索引
💡 考点:理解分块查找原理,能估算 ASL
三、树形结构查找(重中之重!)
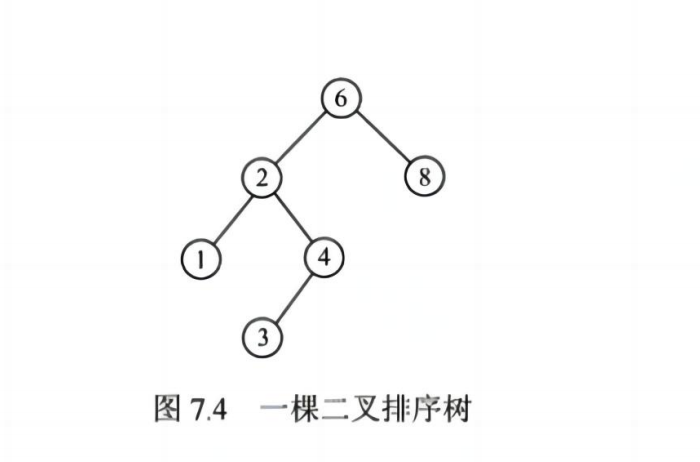
✅ (一)二叉排序树(BST)
📌 定义:
- 左子树所有节点 < 根节点 < 右子树所有节点
- 是一种动态查找表
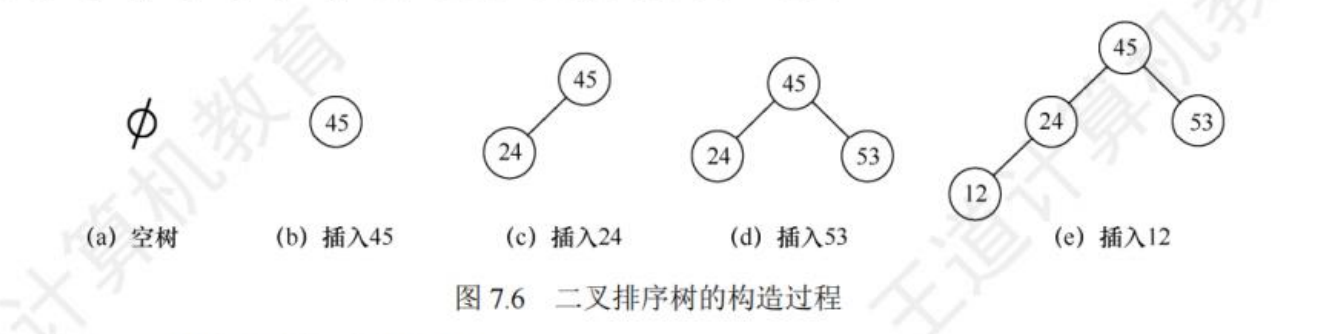
cpp
// 构造二叉排序树
void Create_BST(BiTree &T, KeyType str[], int n) {
T = NULL;
int i = 0;
while(i < n) { // 依次将每个关键字插入二叉树
BST_Insert(T, str[i++]);
}
}📌 操作:
- 查找:类似折半查找
cpp
typedef struct BSTNode {
ElemType data; // 数据域
struct BSTNode *lchild, *rchild; // 左、右孩子指针
} BSTNode, *BiTree;
BSTNode *BST_Search(BiTree T, ElemType key) {
while(T != NULL && key != T -> data) { // 若树空或等于根结点值,则结束循环
if(key < T -> data) { // 小于,则在左子树上查找
T = T -> lchild;
} else { // 大于,则在右子树上查找
T = T -> rchild;
}
}
return T;
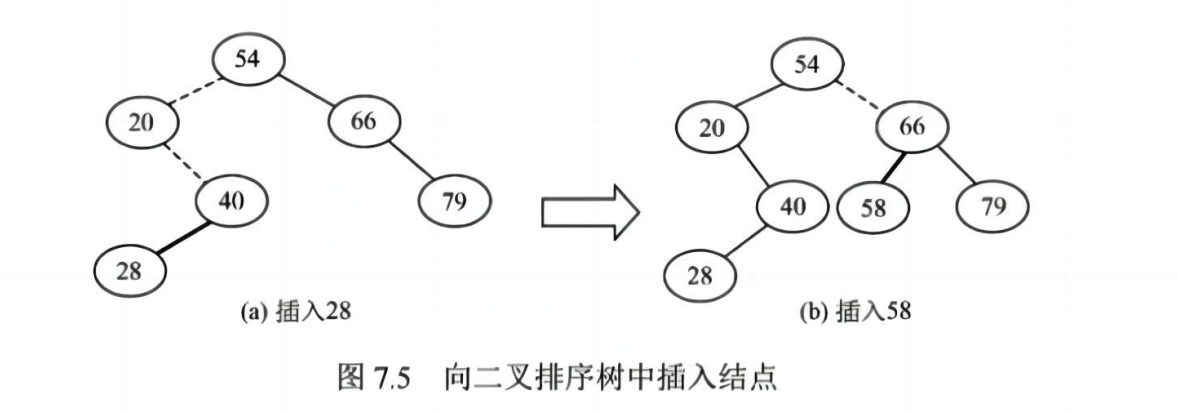
}- 插入:从根开始,按大小关系插入合适位置
cpp
// 二叉排序树插入
int BST_Insert(BiTree &T, ElemType key) {
if(T == NULL) { // 原树为空,新插入的根结点记为根结点
T = new BSTNode();
T -> data = key;
T -> lchild = NULL;
T -> rchild = NULL;
return 1; // 返回1, 插入成功
} else if(key == T -> data) { // 树中存在相同的关键字,插入失败
return 0;
} else if(key < T -> data) { // 插入T的左子树
return BST_Insert(T -> lchild, key);
} else { // 插入T的右子树
return BST_Insert(T -> rchild, key);
}
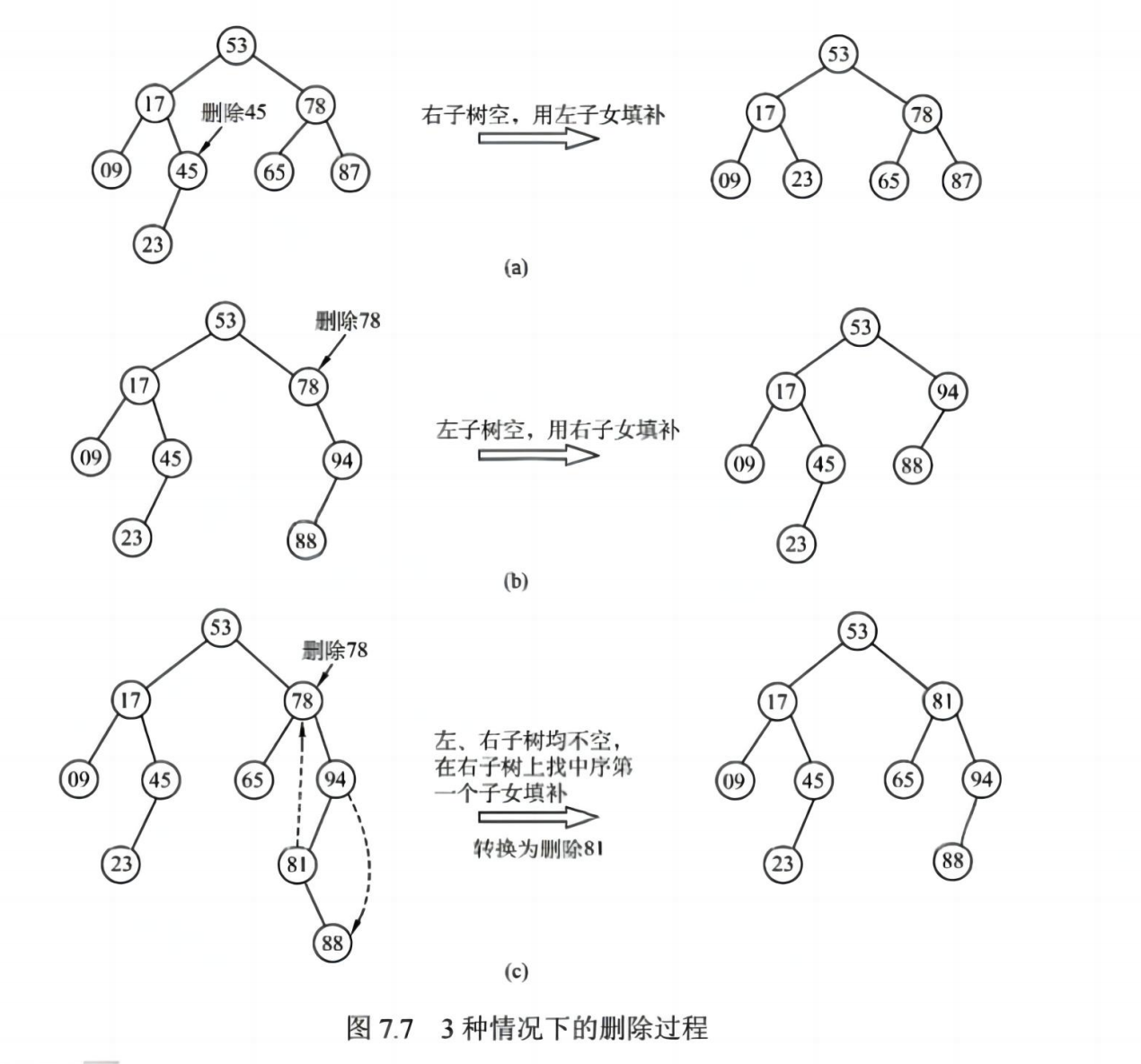
}- 删除 :三种情况
- 无子树 → 直接删
- 一个子树 → 替换
- 两个子树 → 找后继或前驱替换
📌 性质:
- 中序遍历得到有序序列
- 平衡时查找效率高,最坏退化为链表
💡 考点:构造 BST、插入/删除操作、判断是否为 BST
✅ (二)平衡二叉树(AVL 树)
📌 定义:
- 是一种自平衡二叉排序树
- 任意节点的左右子树高度差 ≤ 1
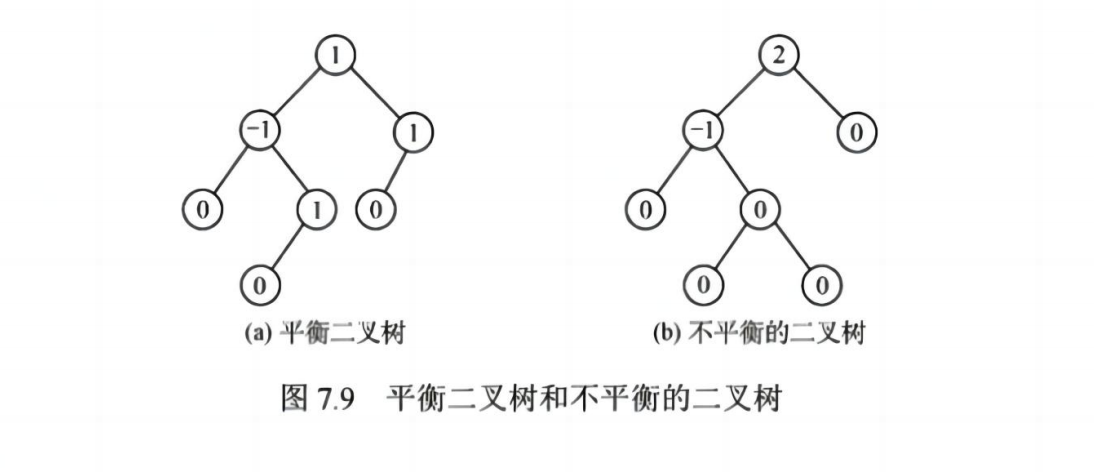
📌 平衡因子(BF):
- BF=左子树高度−右子树高度BF=左子树高度−右子树高度
- BF ∈ {-1, 0, 1}
📌 失衡处理(四种旋转):
| 类型 | 说明 |
|---|---|
| LL 型 | 左孩子左子树过高 → 右旋 |
| RR 型 | 右孩子右子树过高 → 左旋 |
| LR 型 | 左孩子右子树过高 → 先左旋再右旋 |
| RL 型 | 右孩子左子树过高 → 先右旋再左旋 |
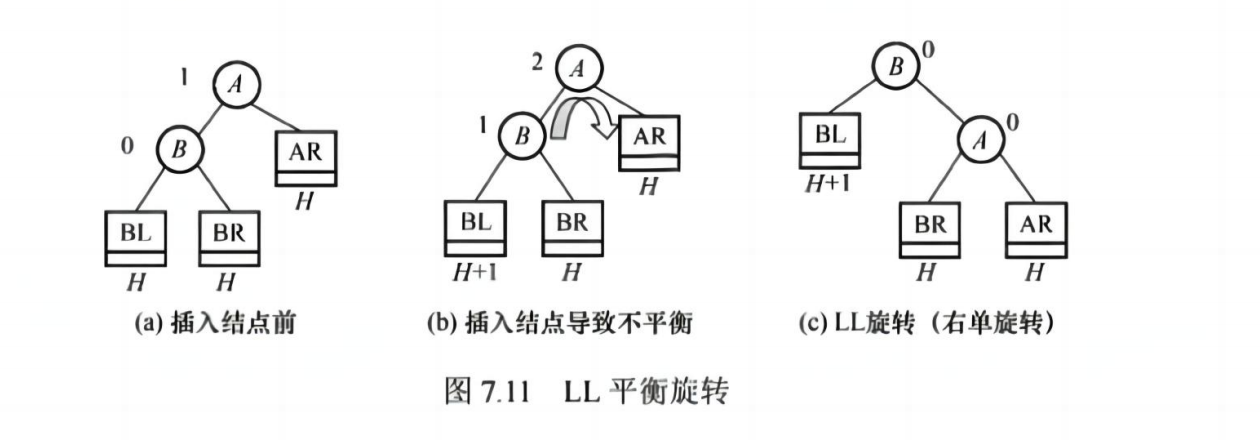
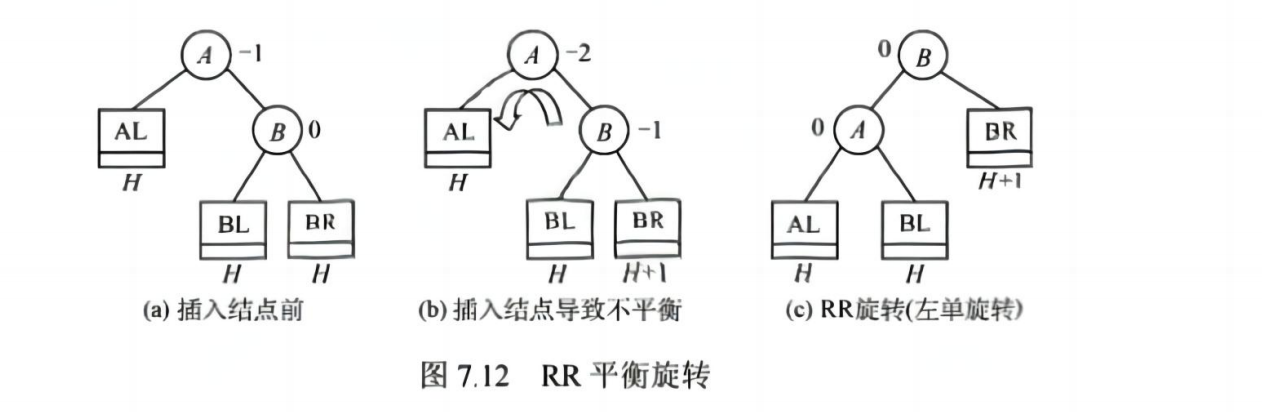
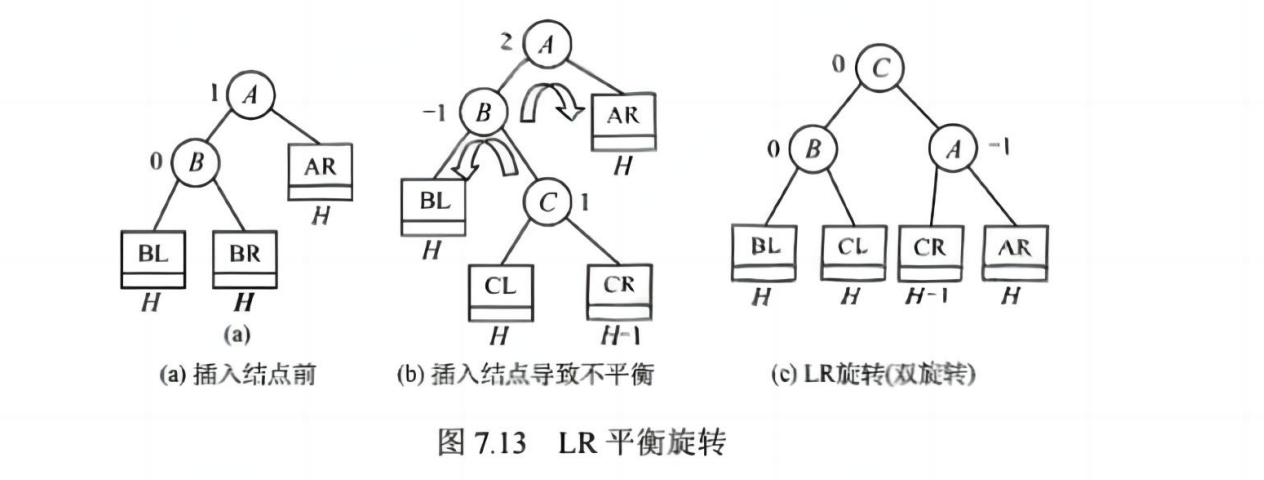
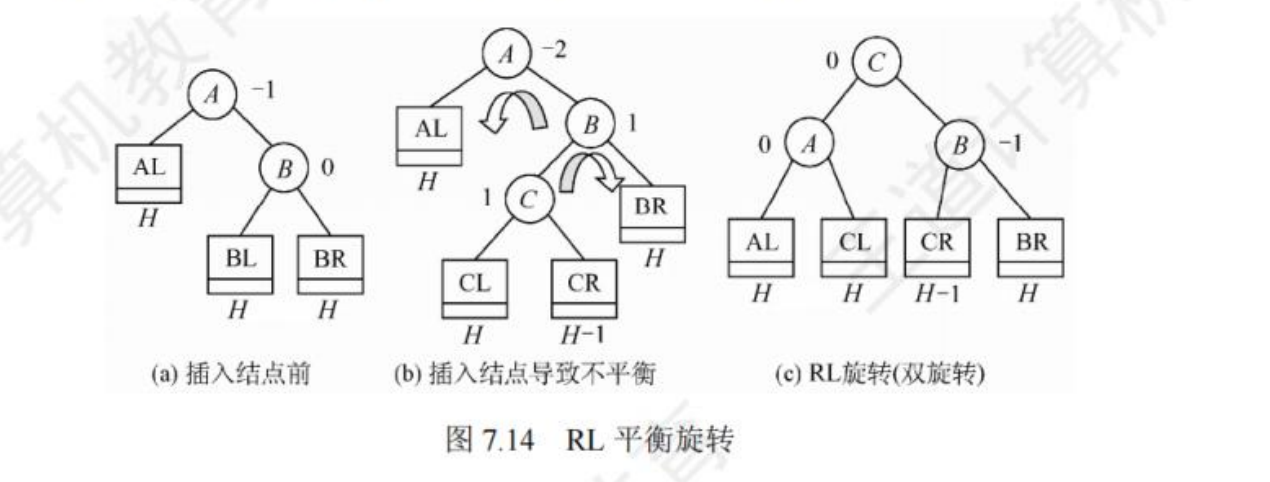
💡 考点:理解旋转机制,能判断失衡类型并画出调整后的树
✅ (三)红黑树
📌 定义:
- 是一种近似平衡的二叉排序树
- 保证最长路径不超过最短路径的 2 倍
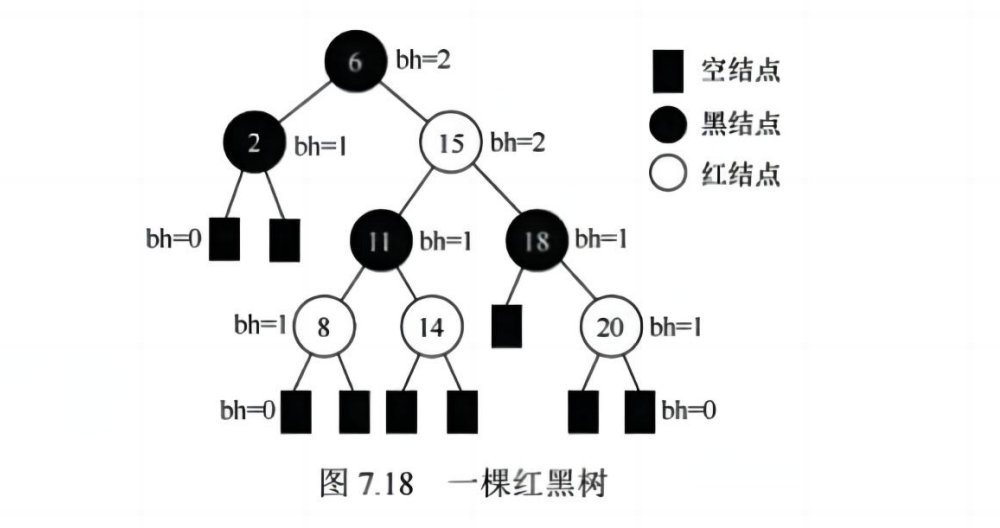
📌 五条性质(必须记住):
- 每个节点是红或黑
- 根是黑色
- 叶子(NIL)是黑色
- 红节点的子节点必须是黑
- 任一节点到其叶子的所有路径包含相同黑节点数
🔥 红黑树的插入规则(核心考点!)
红黑树的插入过程分为两步:
第一步:按 BST 规则插入新节点,并将其染为红色
- 新节点总是作为叶子插入
- 初始颜色设为 红色(避免破坏性质5,因为增加红节点不影响黑高)
第二步:修复可能被破坏的红黑性质
插入红色节点后,唯一可能被破坏的是性质4 (红-红冲突)。
我们通过重新着色 (recoloring)和旋转(rotation)来修复。
⚠️ 注意:根节点始终要保持黑色,若修复后根变红,最后需将其染黑。
🧩 插入后的三种主要情况(设当前节点为 z,父节点为 p,叔叔节点为 u)
| 情况 | 条件 | 处理方式 |
|---|---|---|
| 情况1 | z 的父节点 p 是黑色 |
✅ 无需调整!直接结束。 |
| 情况2 | z 的父节点 p 是红色 ,且叔叔节点 u 也是红色 |
🔁 重新着色 : - 将 p 和 u 染黑 - 将爷节点 g 染红 - 令 z = g,继续向上检查 |
| 情况3 | z 的父节点 p 是红色 ,但叔叔节点 u 是黑色(或 NIL) |
🔄 旋转 + 重新着色 : 根据 z 相对于 p 和 g 的位置,分四种子情况: 1. LL 型 (z 是左孩子,p 是左孩子)→ 右单旋,父换爷+染色 2. RR 型 (z 是右孩子,p 是右孩子)→ 左单旋,父换爷+染色 3. LR 型 (z 是右孩子,p 是左孩子)→ 左右旋,子换爷+染色 4. RL 型 (z 是左孩子,p 是右孩子)→ 右左旋 ****,子换爷+染色 |
✅ 关键记忆点:
- 先看父
- 父为黑 → 直接插入
- 父为红再看叔
- 叔为红 → 变色上移
- 叔为黑或NULL → 旋转调整
📌 优势:
- 插入/删除效率稳定,
- 实际应用广泛(如 Linux 内核、Java TreeMap)
💡 考点:理解红黑树性质,了解其用途,不要求手写旋转
✅ (四)B 树与 B+ 树(难点!)
📌 B 树(B-tree)
✅ 定义:
- 多路搜索树,常用于数据库和文件系统
- 所有叶子在同一层,非叶子节点至少有 ⌈m/2⌉ 个子树(除根结点)
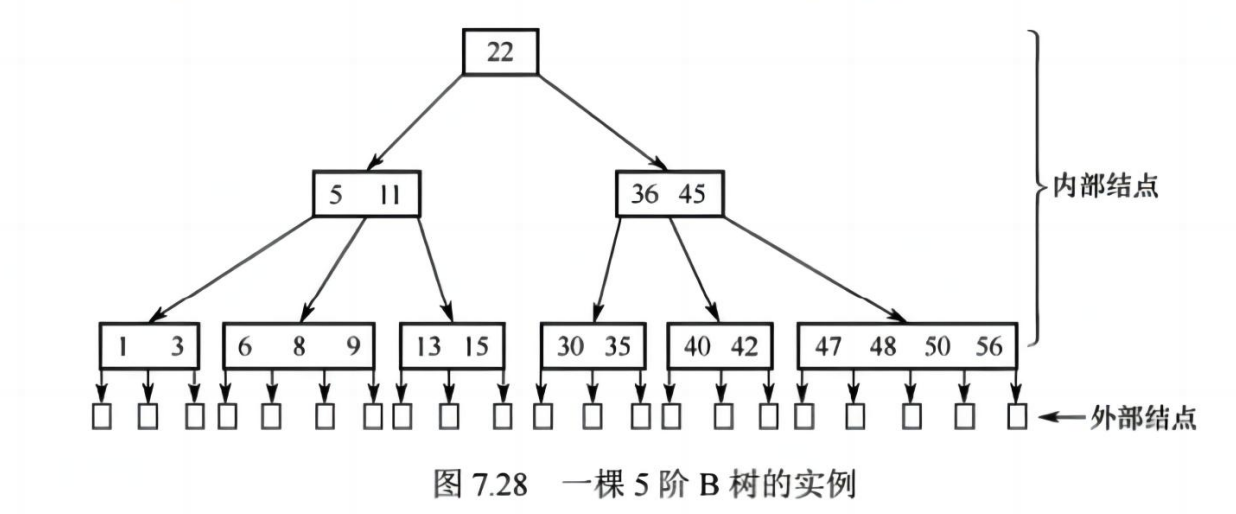
✅ 性质:
- 每个节点最多 m 个子树,m -1 个关键字
- 关键字按顺序排列,子树按大小划分区间
- 插入、删除可能导致分裂或合并
✅ 操作:
- 查找:从根开始,按区间递归
- 插入:先查找,若满则分裂
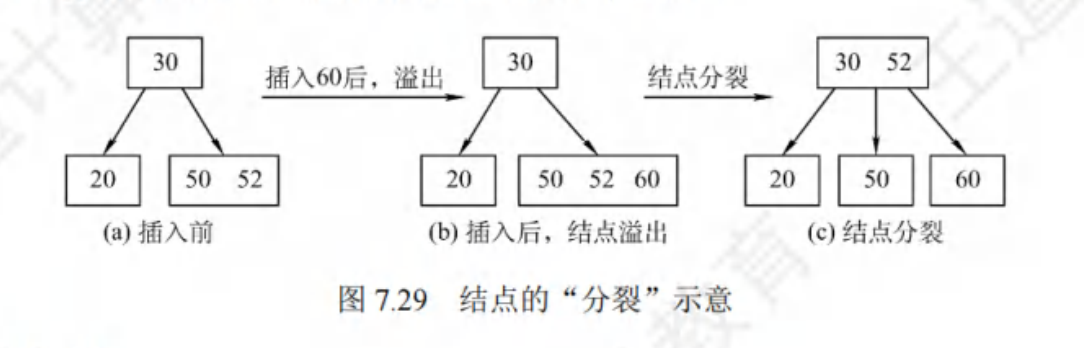
- 删除:若不足则借或合并
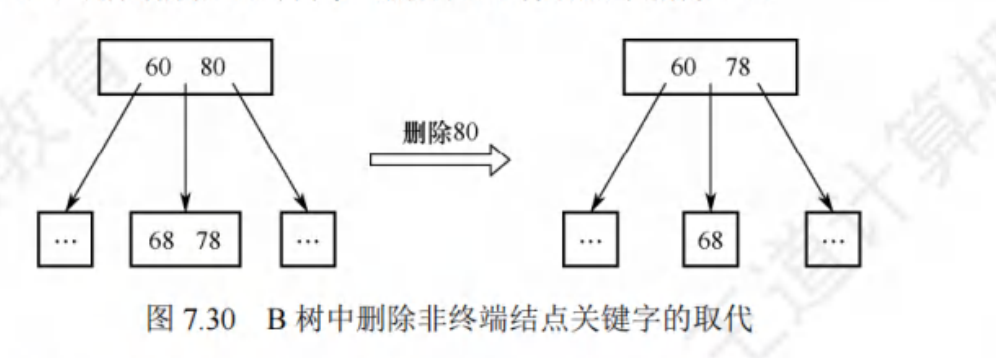
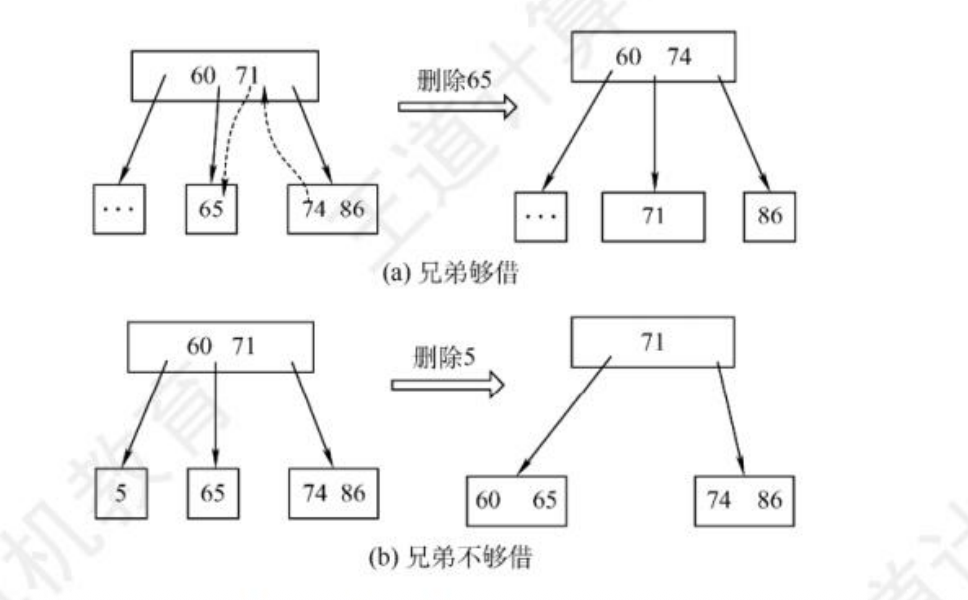
💡 考点:掌握插入、删除、查找的操作过程(王道要求)
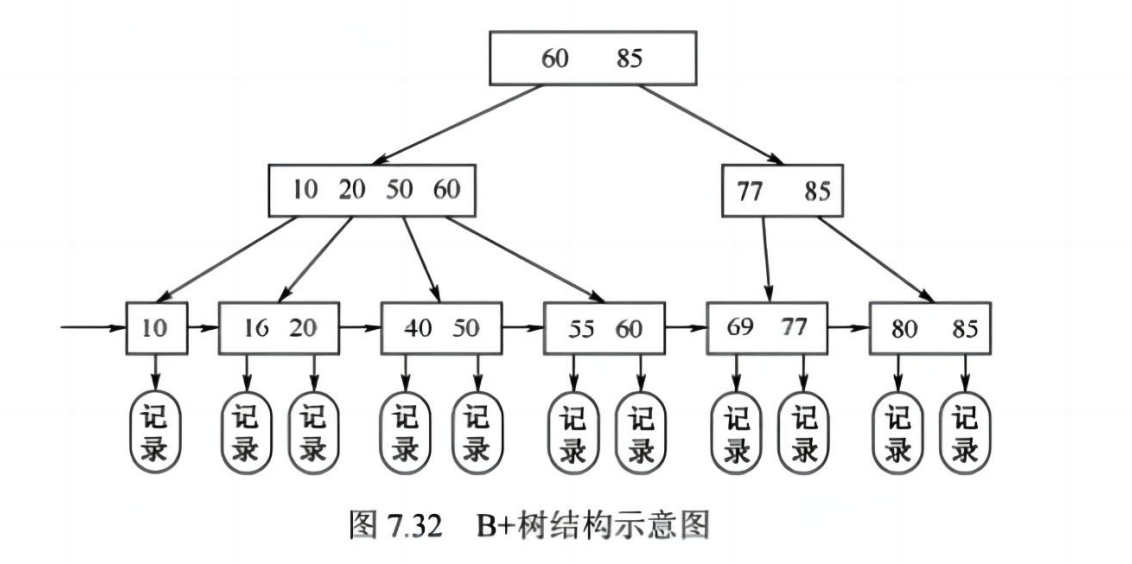
📌 B+ 树(B+-tree)
✅ 与 B 树的区别:
| 对比项 | B 树 | B+ 树 |
|---|---|---|
| 数据存储位置 | 所有节点(包括非叶子)都可存数据 | 仅叶子节点存数据,非叶子只存索引 |
| 关键字重复 | 每个关键字在整个树中唯一 | 关键字在非叶子(索引)和叶子(数据)中重复出现 |
| 叶子节点结构 | 无连接 | 所有叶子通过指针链接成链表 |
| 范围查询效率 | 低(需多次回溯) | 高(顺序遍历叶子即可) |
| 典型应用 | 较少用于现代数据库 | MySQL、Oracle 等数据库索引 |
✅ 优点:
- 更适合磁盘存储(减少 I/O)
- 支持高效范围查询(如
SELECT * FROM table WHERE id > 10)
💡 考点:了解基本概念和性质,知道用于数据库索引
四、散列(Hash)表(重点!)
✅ 基本思想:
- 通过散列函数将关键字映射到地址,实现快速查找
✅ 散列函数设计原则:
- 均匀分布
- 计算简单
- 减少冲突
✅ 常见散列函数:
- 直接定址法
- 除留余数法(最常用)
- 平方取中法
- 折叠法
✅ 冲突处理方法(必须掌握):
| 方法 | 原理 | 优点 | 缺点 |
|---|---|---|---|
| 开放定址法 | 在表内寻找空闲位置 | 不需额外空间 | 聚集问题严重 |
| 拉链法 | 每个桶挂一个链表 | 无聚集,易扩展 | 需额外指针空间 |
| 公共溢出区 | 单独区域存放冲突元素 | 便于管理 | 需额外空间 |
💡 考点:理解各种方法的原理,能画出链地址法的结构图
✅ 散列查找的性能分析
散列表的查找效率主要取决于三个因素
- 散列函数
- 冲突处理方法
- 装填因子(α)
装填因子 α = 表中元素个数 n / 散列表长度 m
ASL= 查找长度 / 地址数(地址数是用作%的数,不是表长!!!)
✅ 散列表 ASL 计算(线性探测法)
关键字 :22, 41, 53, 46, 30, 13
H(key) = key % 11,表长 m = 11
最终散列表:
| 地址 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 关键字 | 22 | 46 | 13 | 41 | 53 | 30 |
- ASL成功 = (1+1+1+1+3+2)/6 = 1.5
- ASL失败 = (2+1+3+2+1+1+1+1+5+4+3)/11 = 24/11 ≈ 2.18
注:失败查找从每个地址 i 开始,循环探测至第一个"真正空"单元(地址1、4~7)。
⚠️ 重要注意事项(开放定址法)
- 删除元素时不能置空,需设为"已删除"标记(tombstone)。
- 查找时遇到"已删除"单元必须继续探测 ,只有遇到从未使用的空槽才停止。
- 因此,ASL失败 的终止条件是"真正空",不是"已删除"。
考研若未提删除,默认无标记,按上述方法计算即可。
💡 考点:计算 ASL,分析性能