1.打开两个终端
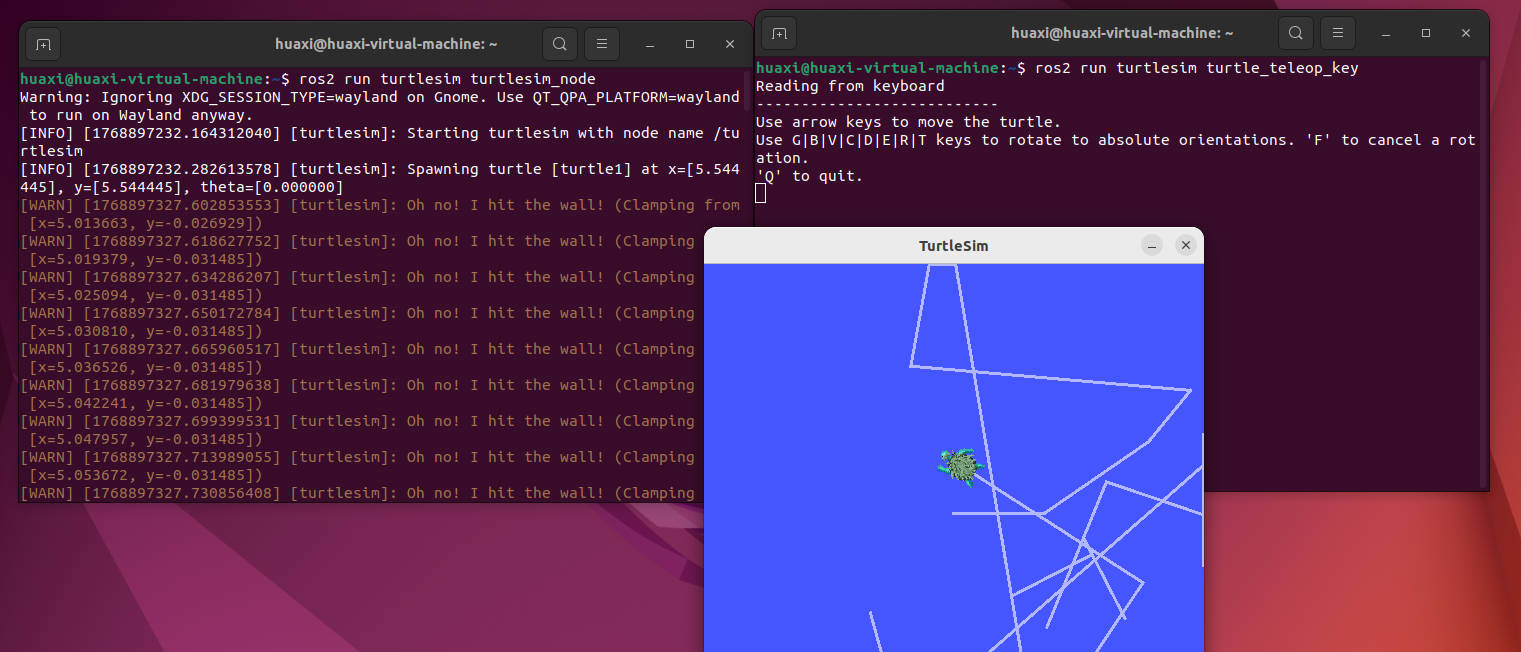
在第一个终端输入 :ros2 run turtlesim turtlesim_node
回车会出现带海龟的界面
在第二个终端输入:ros2 run turtlesim turtle_teleop_key
保持第二个终端处于选中的状态
2.按键盘上的上下箭头键可以让海龟上下运动,左右箭头键可以让海龟旋转
1.打开两个终端
在第一个终端输入 :ros2 run turtlesim turtlesim_node
回车会出现带海龟的界面
在第二个终端输入:ros2 run turtlesim turtle_teleop_key
保持第二个终端处于选中的状态
2.按键盘上的上下箭头键可以让海龟上下运动,左右箭头键可以让海龟旋转