前言
- 继Zephyr学习之点亮LED文章。
- 本次使用的示例工程blinky_pwm
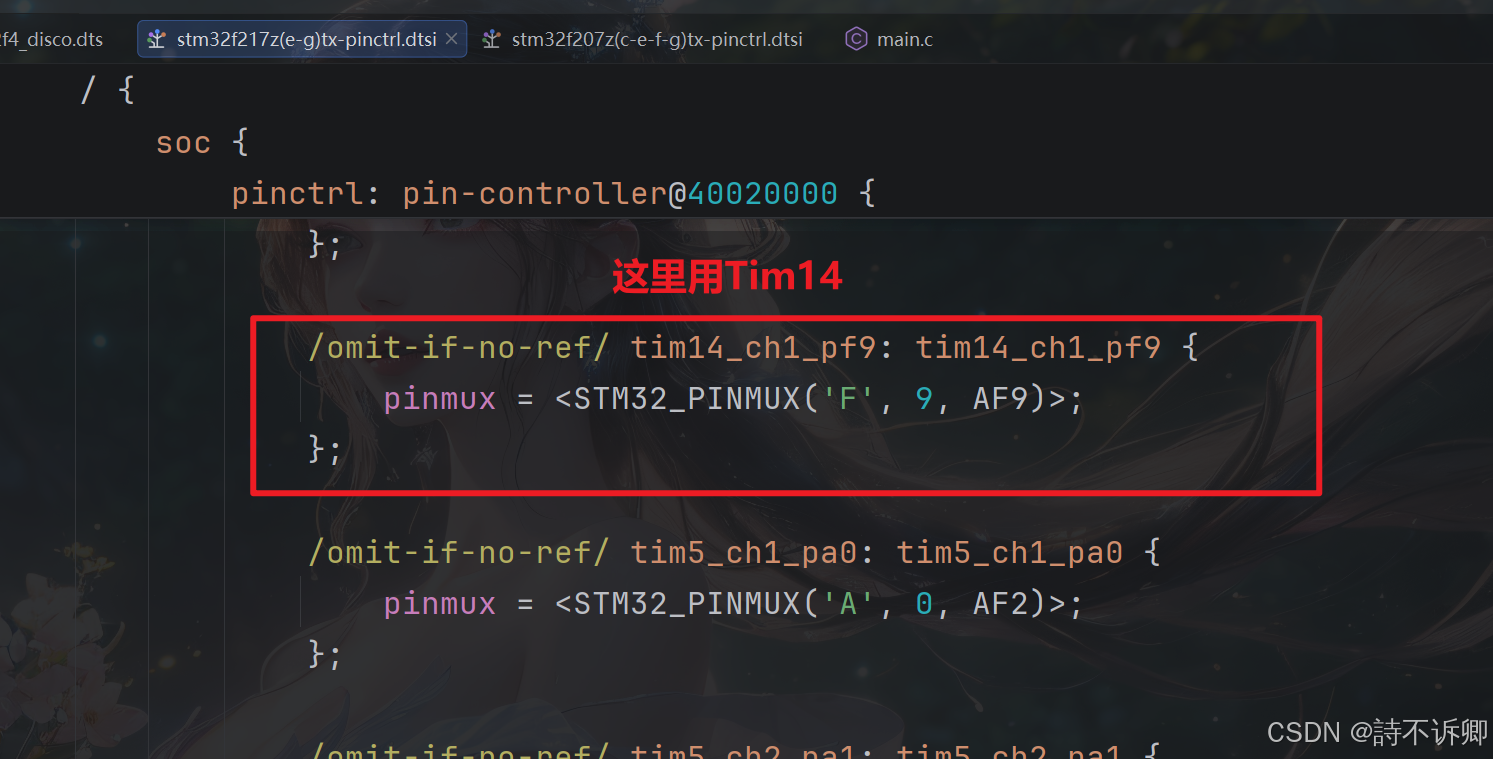
- 驱动的引脚为PF9
工程复制并打开项目

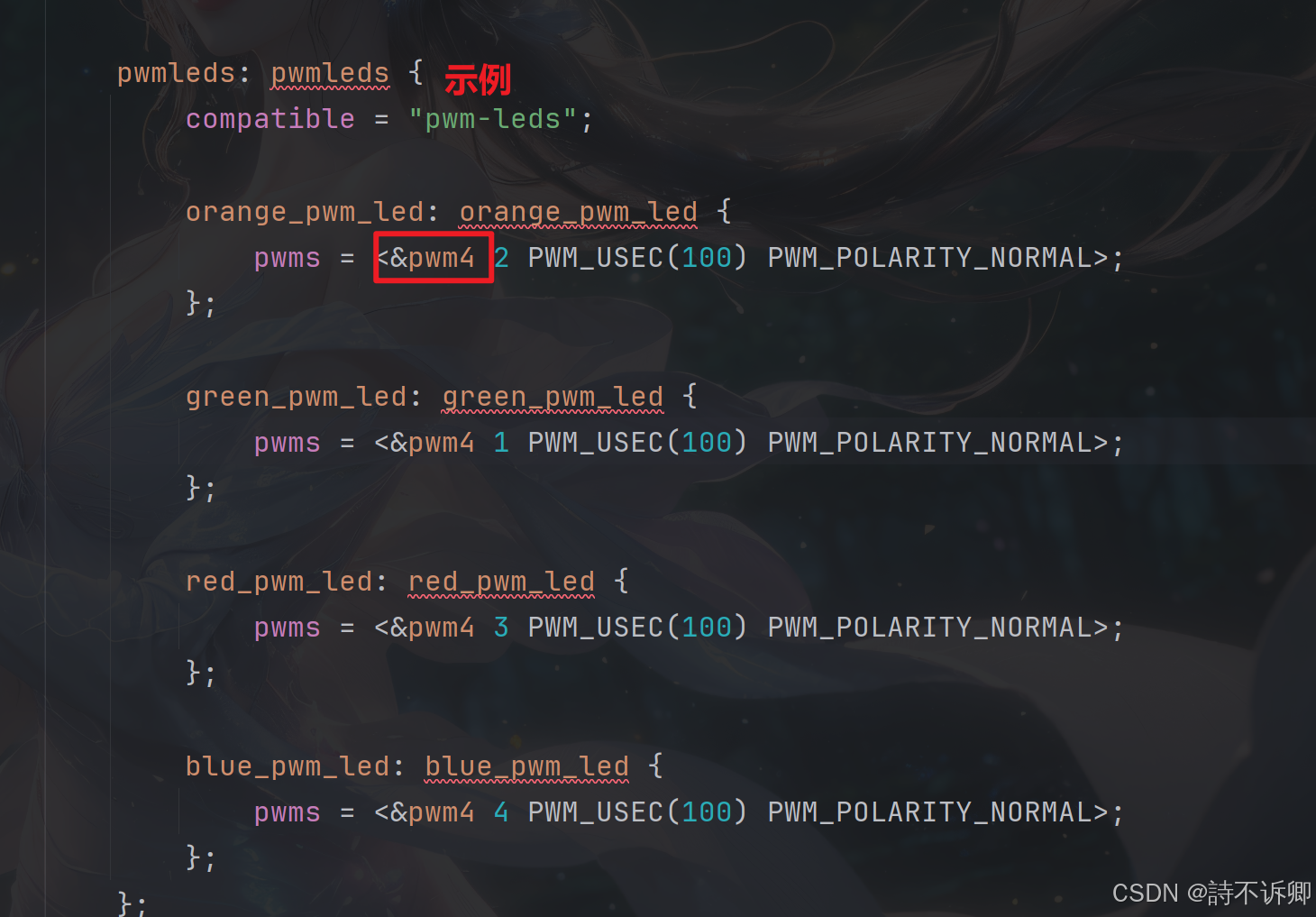
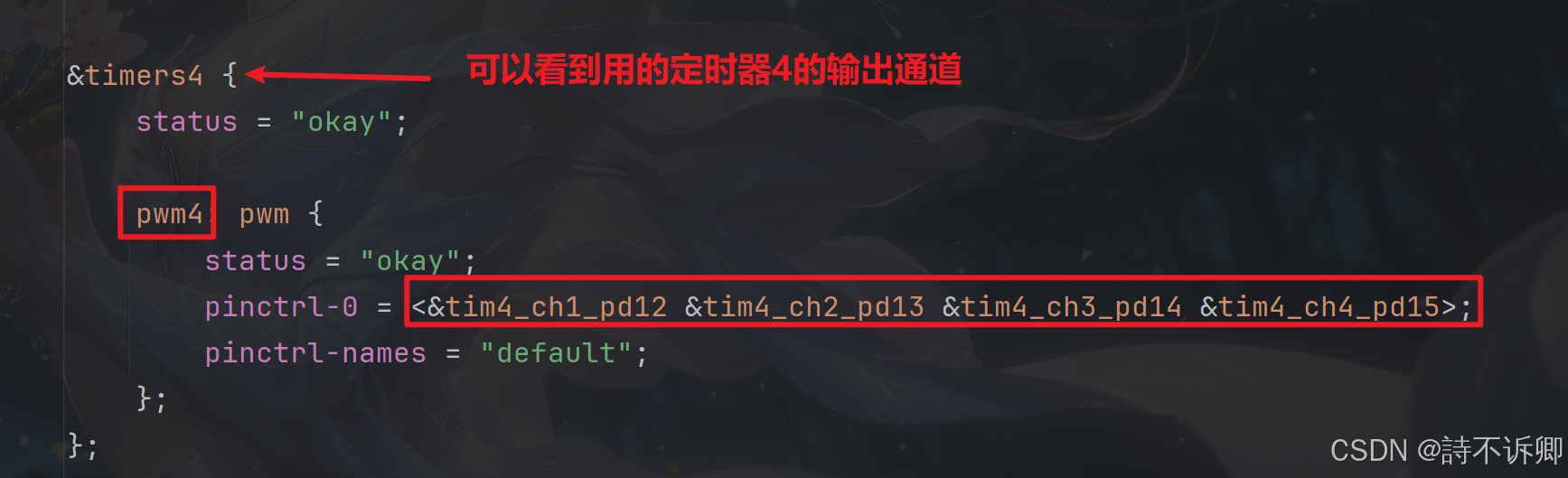
参考提供的设备树文件的PWM节点编写规则
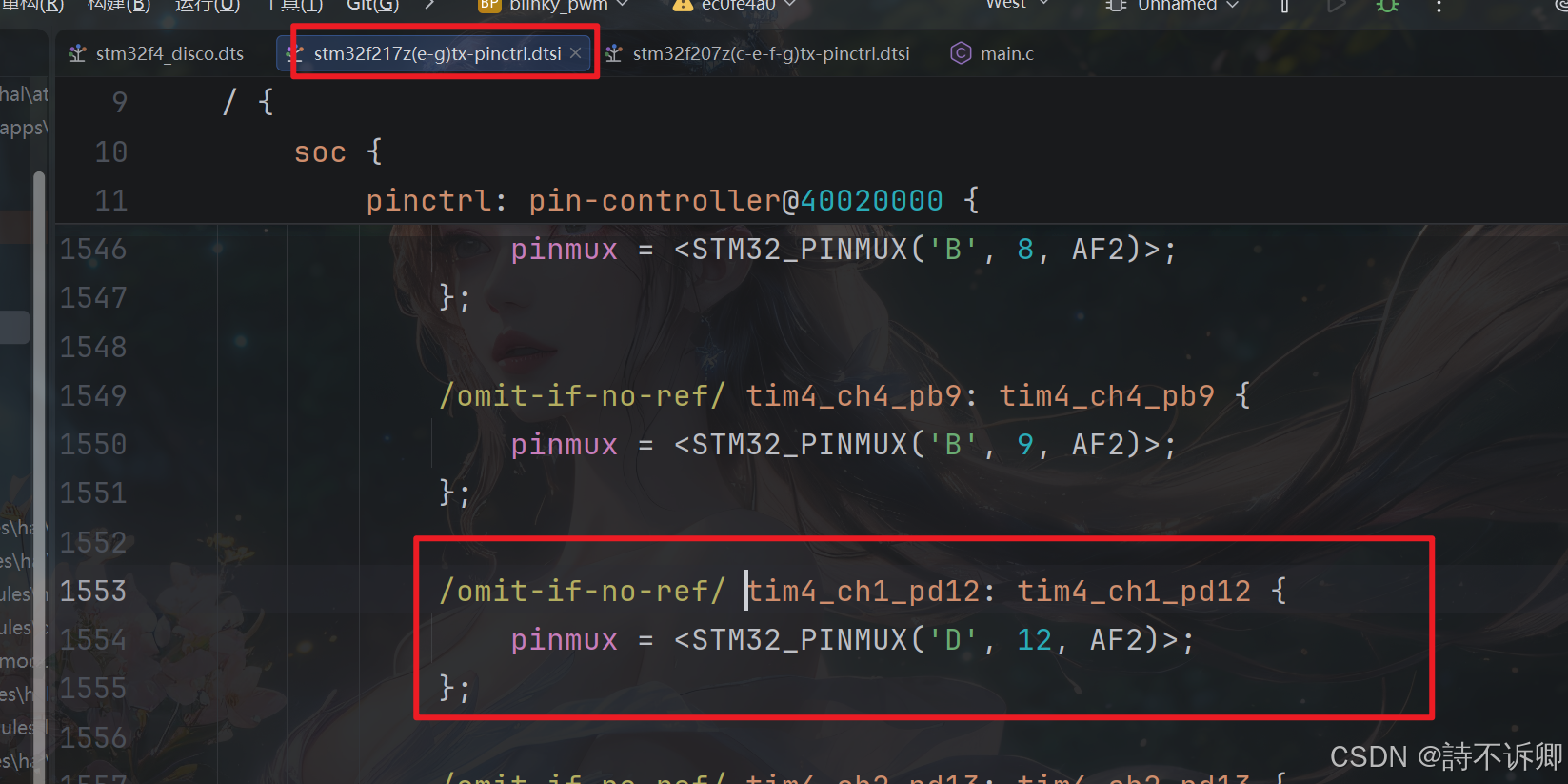
找到我们这边使用的pf9对应的引脚定义
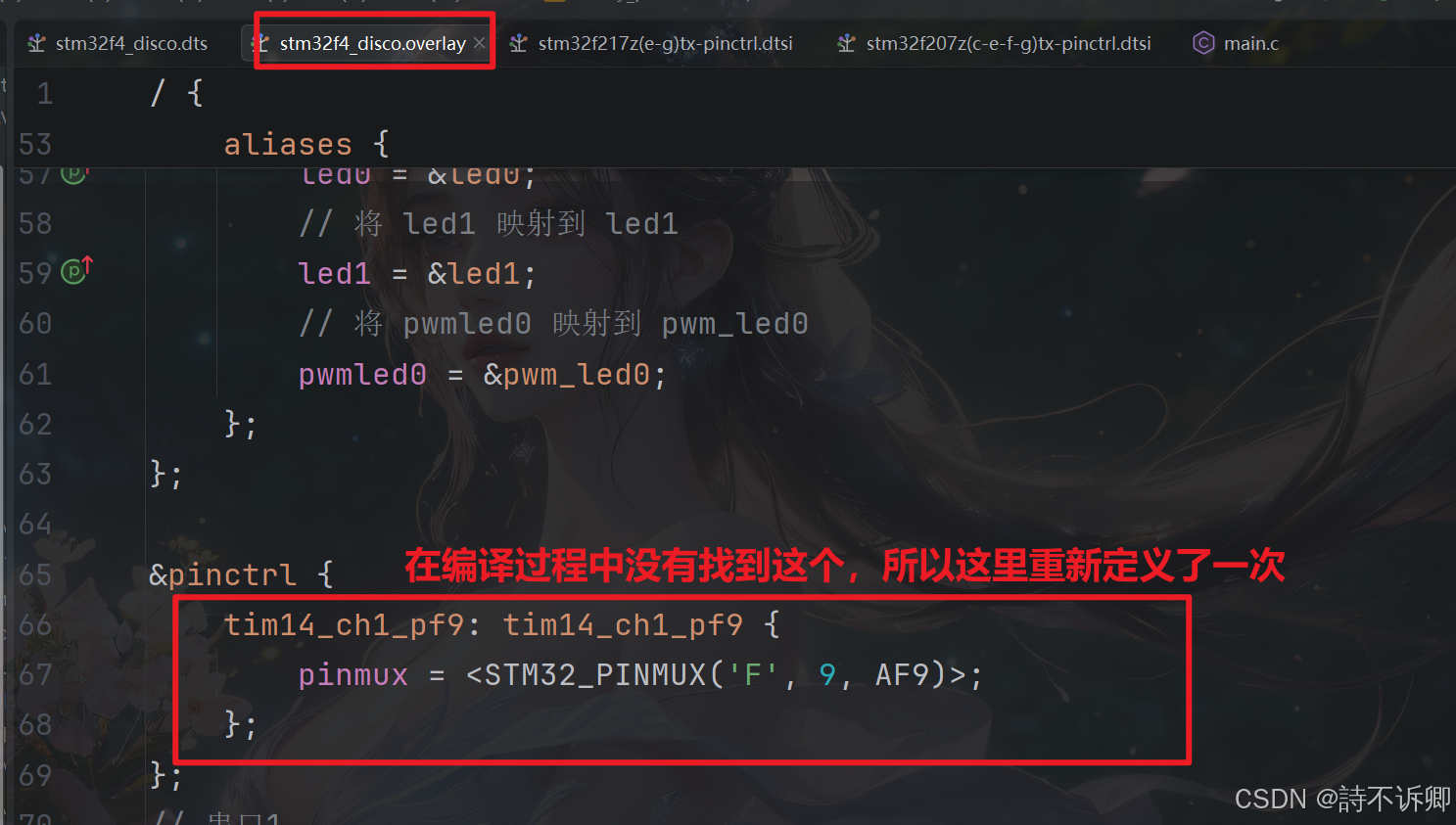
编写设备树覆盖配置文件
c
/ {
// 选择系统控制台和 shell UART 设备
chosen {
// 指定系统控制台使用 usart1
zephyr,console = &usart1;
// 指定 shell UART 使用 usart1
zephyr,shell-uart = &usart1;
};
// GPIO LED 配置节点
leds {
// 兼容性字符串,表示使用 GPIO LED 驱动
compatible = "gpio-leds";
// 第一个 LED 配置
led0: led0 {
// 配置 GPIO 引脚为 PF9(GPIOF 端口第 9 号引脚),高电平有效
gpios = <&gpiof 9 GPIO_ACTIVE_HIGH>; // PF9
// 设置 LED 的标签名称
label = "User LED0";
};
// 第二个 LED 配置
led1: led1 {
// 配置 GPIO 引脚为 PF10(GPIOF 端口第 10 号引脚),高电平有效
gpios = <&gpiof 10 GPIO_ACTIVE_HIGH>; // PF10
// 设置 LED 的标签名称
label = "User LED1";
};
};
// PWM LED 配置节点
pwmleds {
// 启用 PWM LED 设备
status = "okay";
// 兼容性字符串,表示使用 PWM LED 驱动
compatible = "pwm-leds";
// PWM 控制的 LED 配置
pwm_led0: pwm_led0 {
// 配置 PWM 属性:引用 PWM 设备、通道号、周期、极性
// &pwm14: 引用 PWM 设备
// 1: 使用通道 1
// PWM_MSEC(100): 设置周期为 100 毫秒
// PWM_POLARITY_INVERTED: 设置为反向极性
pwms = <&pwm14 1 PWM_MSEC(100) PWM_POLARITY_INVERTED>;
// 设置 PWM LED 的标签名称
label = "PWM LED0";
};
};
// 别名定义,简化设备引用
aliases {
// 将 uart0 映射到 usart1
uart0 = &usart1;
// 将 led0 映射到 led0
led0 = &led0;
// 将 led1 映射到 led1
led1 = &led1;
// 将 pwmled0 映射到 pwm_led0
pwmled0 = &pwm_led0;
};
};
&pinctrl {
tim14_ch1_pf9: tim14_ch1_pf9 {
pinmux = <STM32_PINMUX('F', 9, AF9)>;
};
};
// 串口1
&usart1 {
pinctrl-0 = <&usart1_tx_pa9 &usart1_rx_pa10>;
pinctrl-names = "default";
current-speed = <115200>;
status = "okay";
};
// 定时器
&timers14 {
status = "okay";
pwm14: pwm {
status = "okay";
pinctrl-0 = <&tim14_ch1_pf9>;
pinctrl-names = "default";
};
};注意
编写测试函数
c
/*
* Copyright (c) 2016 Intel Corporation
* Copyright (c) 2020 Nordic Semiconductor ASA
*
* SPDX-License-Identifier: Apache-2.0
*/
/**
* @file Sample app to demonstrate PWM.
*/
#include <zephyr/kernel.h>
#include <zephyr/sys/printk.h>
#include <zephyr/device.h>
#include <zephyr/drivers/pwm.h>
#include <zephyr/drivers/gpio.h>
#include "autoconf.h"
static const struct pwm_dt_spec pwm_led0 = PWM_DT_SPEC_GET(DT_ALIAS(pwmled0));
int main(void)
{
uint32_t max_period = 0;
uint32_t period;
uint8_t dir = 0U;
int ret;
if (!pwm_is_ready_dt(&pwm_led0))
{
printk("Error: PWM device %s is not ready\n",
pwm_led0.dev->name);
return 0;
}
uint32_t pulse_width = 0;
max_period = 1000;
pwm_set_dt(&pwm_led0, max_period, pulse_width);
while (1)
{
ret = pwm_set_dt(&pwm_led0, max_period, pulse_width);
if (ret)
{
printk("Error %d: failed to set pulse width\n", ret);
}
printk("Using pulse_width %d\n", pulse_width);
if (dir == 0)
{
if (pulse_width < max_period)
{
pulse_width++;
}
else
{
dir = 1;
}
}
else
{
if (pulse_width > 0)
{
pulse_width--;
}
else
{
dir = 0;
}
}
k_sleep(K_MSEC(5U));
}
return 0;
}测试结果
