1、镜像拉取
访问渡渡鸟同步镜像站:https://docker.aityp.com/
查找python镜像:

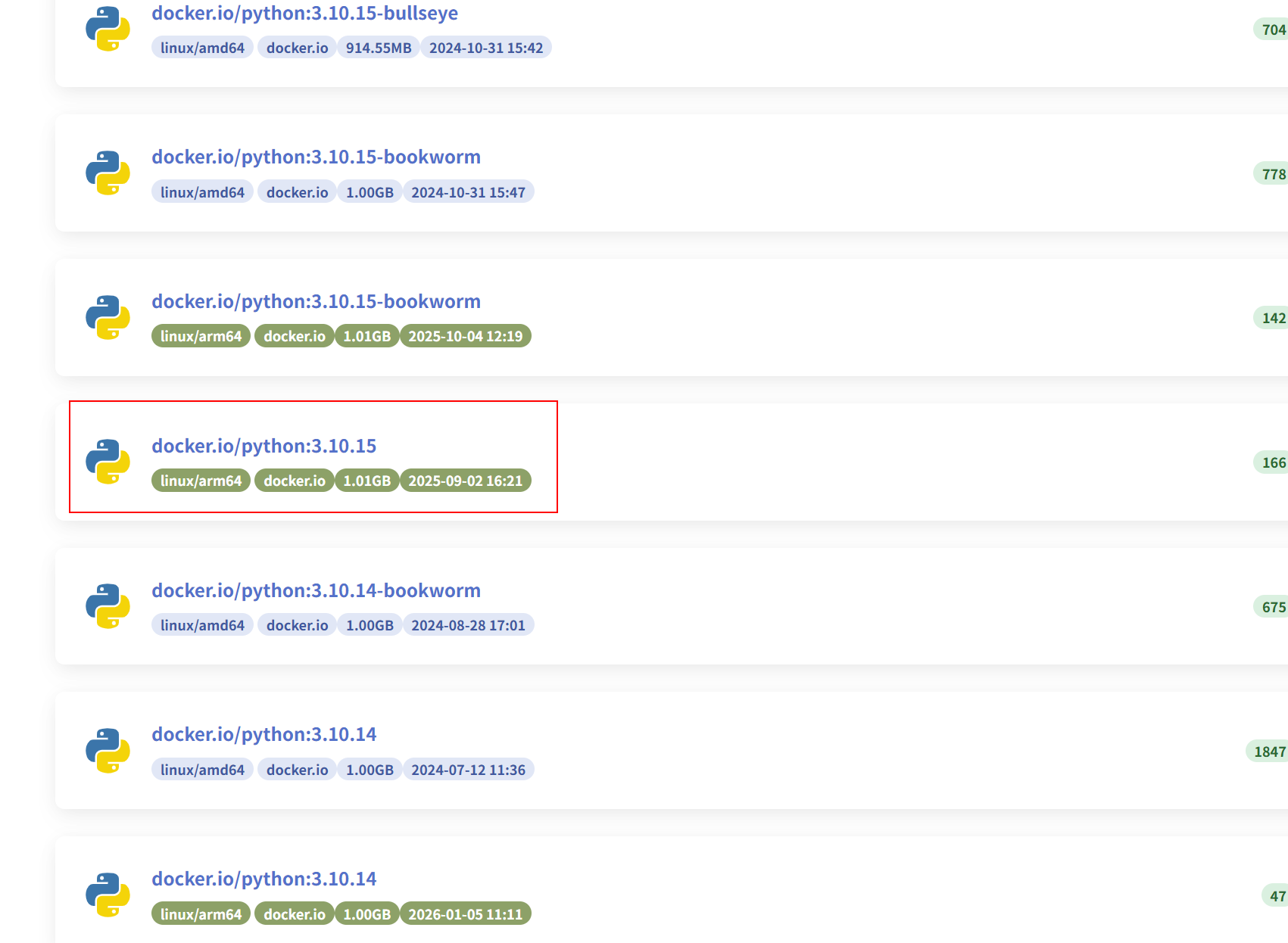
进入之后,找到docker拉取命令:
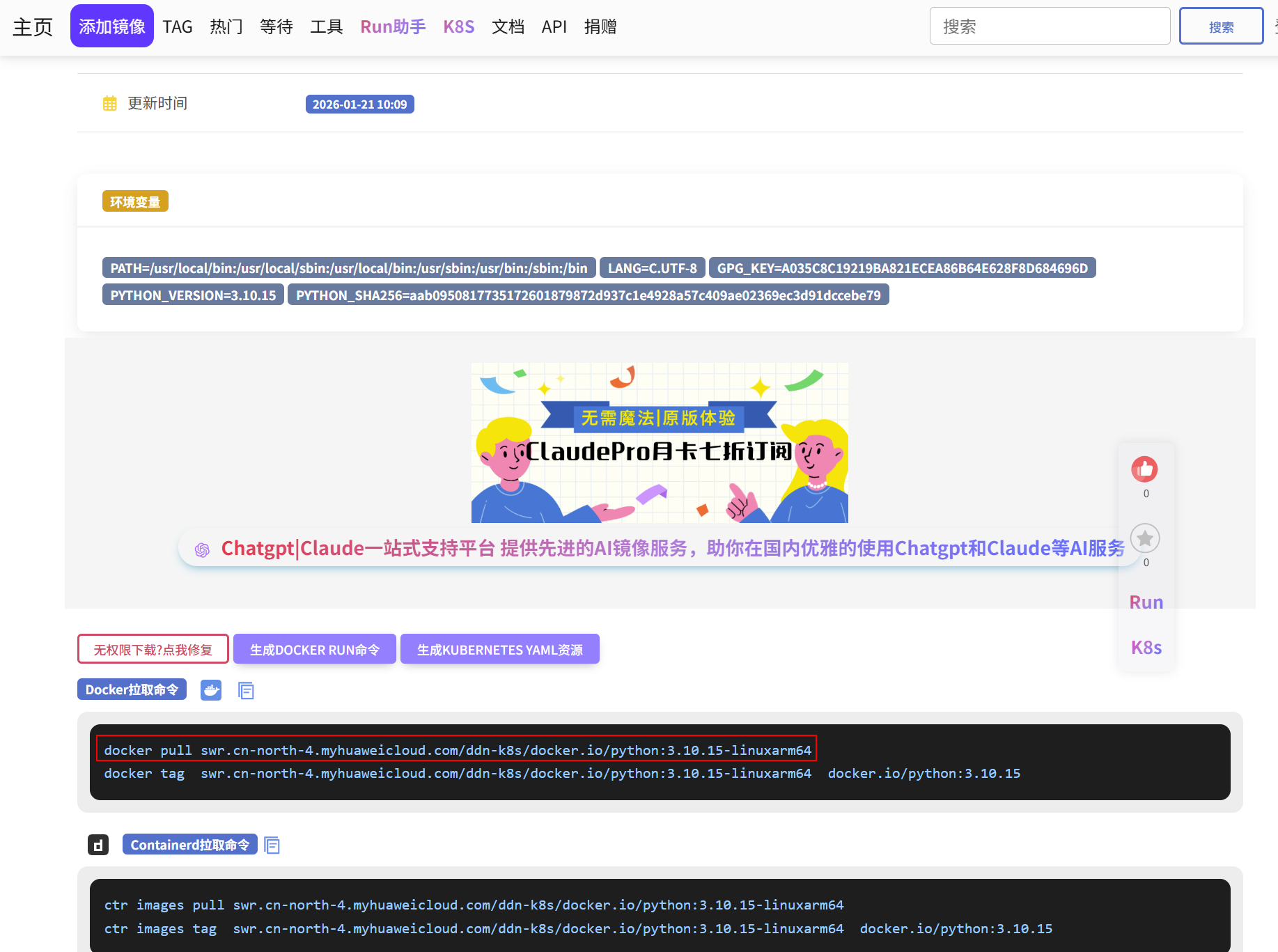
等待拉取完毕,可输入命令:docker images查看镜像是否拉取到位。
2、运行docker
命令如下:
bash
docker run -it \
-v /home/unitree_sdk2_python:/workspace/unitree_sdk2_python \
--name="unitree_g1" \
--network host \
--privileged \
-v /dev:/dev \
-v /run/udev:/run/udev:ro \
swr.cn-north-4.myhuaweicloud.com/ddn-k8s/docker.io/python:3.10.15-linuxarm64 docker启动完毕后,可使用命令docker ps查看。
3、进入docker安装依赖
执行命令:docker exec -it unitree_g1 bash进入docker内部。
按照官方指导安装SDK:https://github.com/unitreerobotics/unitree_sdk2_python/blob/master/README zh.md
也可参考上一篇博客:宇树机器人G1SDK安装与使用
4、错误处理
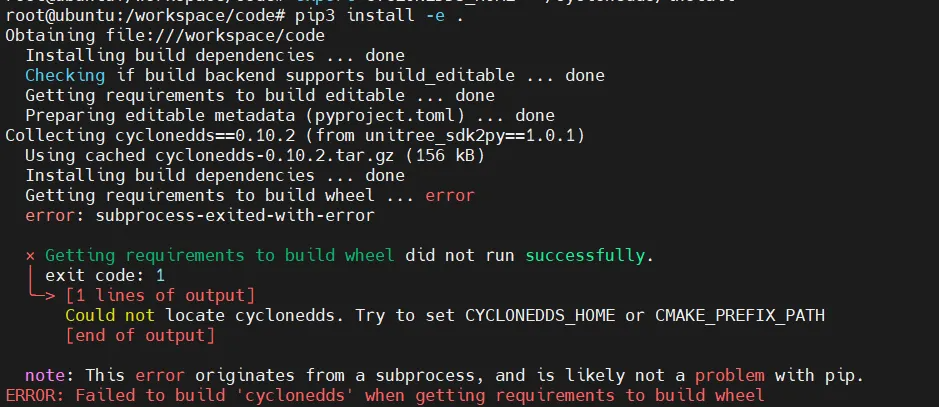
遇到报错:
ERROR: Failed to build 'cyclonedds' when getting requirements to build wheel
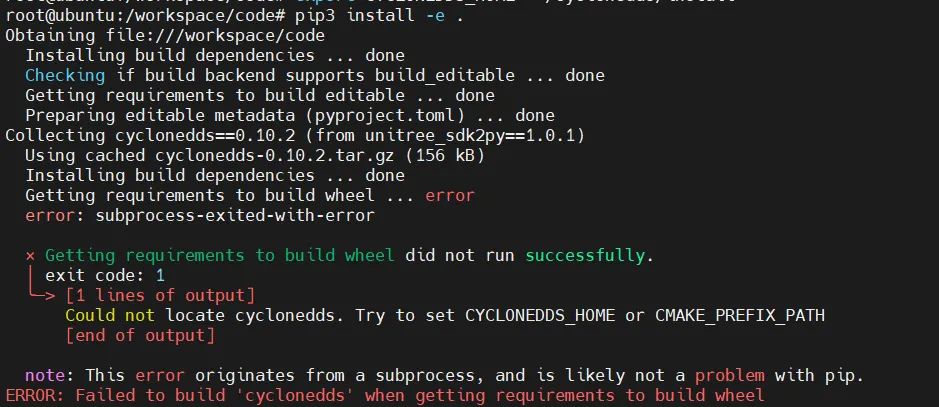
**解决方案:**编译安装cyclonedds:
bash
cd ~
git clone https://github.com/eclipse-cyclonedds/cyclonedds -b releases/0.10.x
cd cyclonedds && mkdir build install && cd build
cmake .. -DCMAKE_INSTALL_PREFIX=../install
cmake --build . --target install进入 unitree_sdk2_python 目录,设置 CYCLONEDDS_HOME 为刚刚编译好的 cyclonedds 所在路径,再安装 unitree_sdk2_python
bash
cd ~/unitree_sdk2_python
export CYCLONEDDS_HOME="~/cyclonedds/install"
pip3 install -e .若还是报错:
将上述命令更改:
你使用了 ~ 符号,但在某些环境下(特别是 Docker 中) ~ 可能不会被正确展开为实际路径。
使用绝对路径:export CYCLONEDDS_HOME="$HOME/cyclonedds/install"
加速安装:
bash
pip3 install -e . -i https://mirrors.aliyun.com/pypi/simple/ --trusted-host mirrors.aliyun.com测试是否安装成功:
进入pythonSDK位置:unitree_sdk2_python/example/g1/audio
执行:python3 g1_audio_client_example.py eth0