1、添加RTC组件
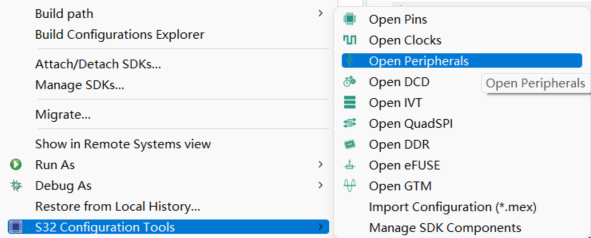
右键项目找到"S32 Configuration Tools"--》"Open Peripherals"进入外设组件界面
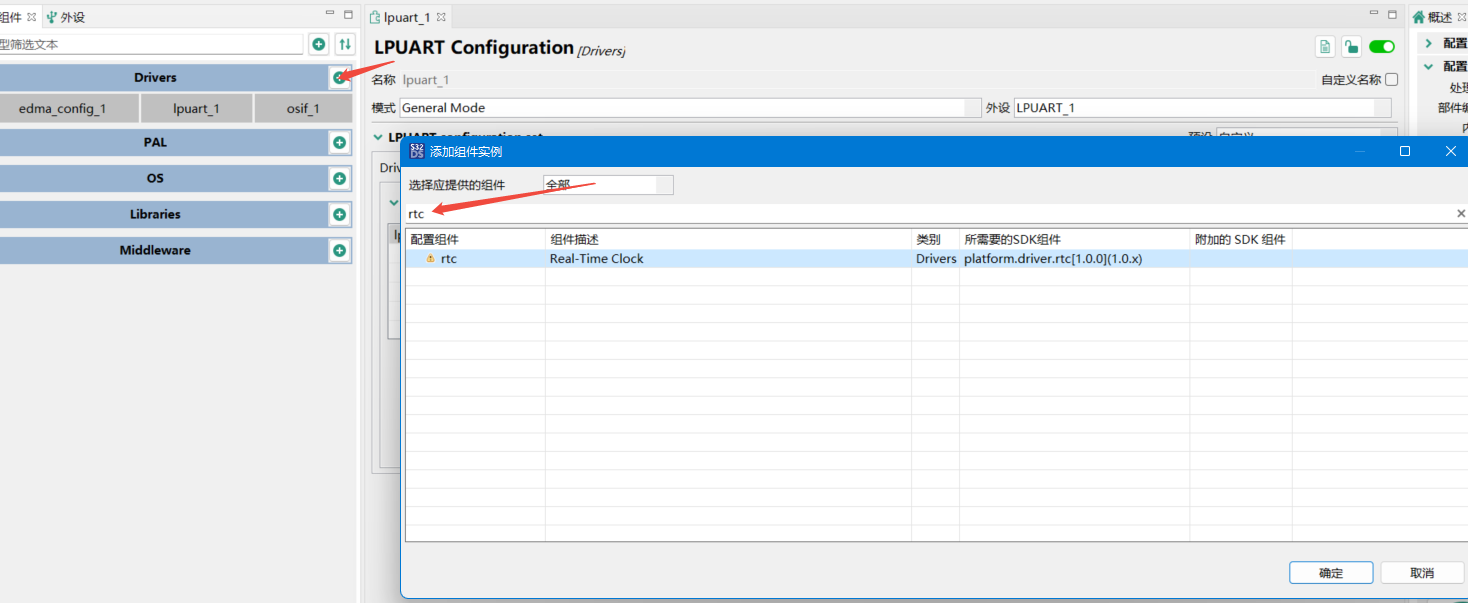
选择Drivers搜索"rtc",添加完后双击rtc_1,配置rtc参数,更新代码
2、RTC初始化
c
/* Initialize RTC instance
* - See RTC configuration component for options
*/
RTC_DRV_Init(0, &rtc_1InitCfg0);
/* Configure RTC Time Seconds Interrupt */
RTC_DRV_ConfigureSecondsInt(0, &rtc_1SecIntCfg0);
/* Set the time and date */
RTC_DRV_SetTimeDate(0, &rtc_1InitCfg0_StartTime);
/* Start the RTC counter */
RTC_DRV_StartCounter(0);3、中断函数
c
//如果在配置RTC参数时启动了"Alarm"中断和"Seconds"中断
/* Alarm interrupt handler */
void alarmISR(void * callbackParam)
{
//到设定的时间则会进入此中断
rtc_timedate_t Scurrent_time,tempTime;
RTC_DRV_GetCurrentTimeDate(0, &tempTime);
Scurrent_time=tempTime;
Scurrent_time.day +=1;
RTC_DRV_StopCounter(0);
RTC_DRV_SetTimeDate(0, &Scurrent_time);
RTC_DRV_StartCounter(0);
RTC_DRV_GetCurrentTimeDate(0, &tempTime);
x1=1;
}
/* Time Seconds interrupt handler */
void secondsISR(void * callbackParam)
{
//每秒进入一次
x++;
}4、main函数
下面是我的main函数,程序里面开启uart,rtc功能;所有在main函数进行了对应的初始化;在循环中判断x1;如果x1等于1则获取当前时间并输出到uart,并将x1置0
c
int main(void)
{
status_t error;
/* Configure clocks for PORT */
error = CLOCK_DRV_Init(&clockMan1_InitConfig0);
DEV_ASSERT(error == STATUS_SUCCESS);
/* Set pins as GPIO */
error = PINS_DRV_Init(NUM_OF_CONFIGURED_PINS0, g_pin_mux_InitConfigArr0);
DEV_ASSERT(error == STATUS_SUCCESS);
/* Initialize LPUART instance */
LPUART_DRV_Init(1, &lpUartState0, &lpuart_0_InitConfig0);
/* Install the callback for rx events */
LPUART_DRV_InstallRxCallback(1, rxCallback, NULL);
LPUART_DRV_ReceiveData(1, (uint8_t *)rx_data, 1U);
/* Initialize RTC instance
* - See RTC configuration component for options
*/
RTC_DRV_Init(0, &rtc_1InitCfg0);
/* Configure RTC Time Seconds Interrupt */
RTC_DRV_ConfigureSecondsInt(0, &rtc_1SecIntCfg0);
/* Set the time and date */
RTC_DRV_SetTimeDate(0, &rtc_1InitCfg0_StartTime);
/* Start the RTC counter */
RTC_DRV_StartCounter(0);
for (;;)
{
LPUART_DRV_ReceiveData(1, (uint8_t *)rx_data, 1U);
if(x1==1){
rtc_timedate_t tempTime;
RTC_DRV_GetCurrentTimeDate(0,&tempTime);
uint8_t* Ctime=currentTimetoString(&tempTime);//时间转字符串
LPUART_DRV_SendDataBlocking(1,(uint8_t *)Ctime,strlen(Ctime),500U);
x1=0;
}
}
}