前言
欢迎进入第四章:线性控制系统的数学模型。在第一章中我们完成了"看房子"的整体概览,第二章我们夯实了"打地基"的编程基础,第三章我们掌握了解决科学运算问题的"专业工具箱"。如果说前三章是让你学会了如何操作工具,那么从本章开始,我们将真正进入控制系统的核心地带。
如果把控制系统设计比作一场建筑工程,那么第四章的任务就是**"绘制蓝图"**。在控制工程中,如果你无法用数学语言准确地描述你的受控对象,那么后续的稳定性分析、时域响应预测以及控制器设计都将是空中楼阁。
本章我们将学习如何将复杂的物理系统抽象为 MATLAB 能够理解的数学"画像"------无论是经典的传递函数(Transfer Function)、直观的零极点增益(ZPK),还是现代控制理论核心的状态空间(State Space)。只有拿到了这些"原材料",我们才能在后续章节中对系统进行全方位的打磨与控制。
如果没有学过前三篇内容,建议通系列链接进行复习,以便更好地理解本章的模型构建逻辑。
一、 核心原理与知识点汇总
- 三种基本模型表现形式 :
- 传递函数形式 (TF):基于拉普拉斯变换,适用于单输入单输出(SISO)系统。
- 状态空间形式 (SS):现代控制理论核心,适用于多输入多输出(MIMO)系统。
- 零极点增益形式 (ZPK):通过根的分布直观观察系统稳定性。
- 连续与离散转换:真实物理系统多为连续,但控制器多为数字(离散)实现。
- 结构图化简:将复杂的串联、并联、反馈系统合并为一个总的传递函数。
- 模型降阶:用简单的低阶模型去近似复杂的高阶模型。
二、 必会函数清单与实例演示
1. tf() ------ 创建传递函数模型
-
功能说明:利用分子和分母的多项式系数定义系统的传递函数。
-
输入定义 :
num(分子系数向量),den(分母系数向量)。 -
返回值:传递函数对象(TF object)。
-
代码示例 :
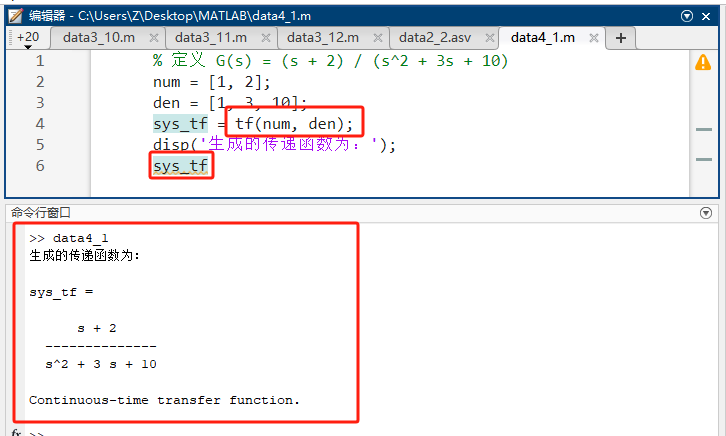
matlab% 定义 G(s) = (s + 2) / (s^2 + 3s + 10) num = [1, 2]; den = [1, 3, 10]; sys_tf = tf(num, den); disp('生成的传递函数为:'); sys_tf -
源码讲解 :系数向量按 sss 的降幂排列。
[1, 2]代表 1s+21s + 21s+2。 -
预期输出 :显示漂亮的数学分式 G(s)G(s)G(s)。
2. ss() ------ 创建状态空间模型
-
功能说明 :根据状态方程矩阵 A,B,C,DA, B, C, DA,B,C,D 定义系统。
-
输入定义 :矩阵 AAA(系统阵), BBB(输入阵), CCC(输出阵), DDD(直接传导阵)。
-
返回值:状态空间对象(SS object)。
-
代码示例 :
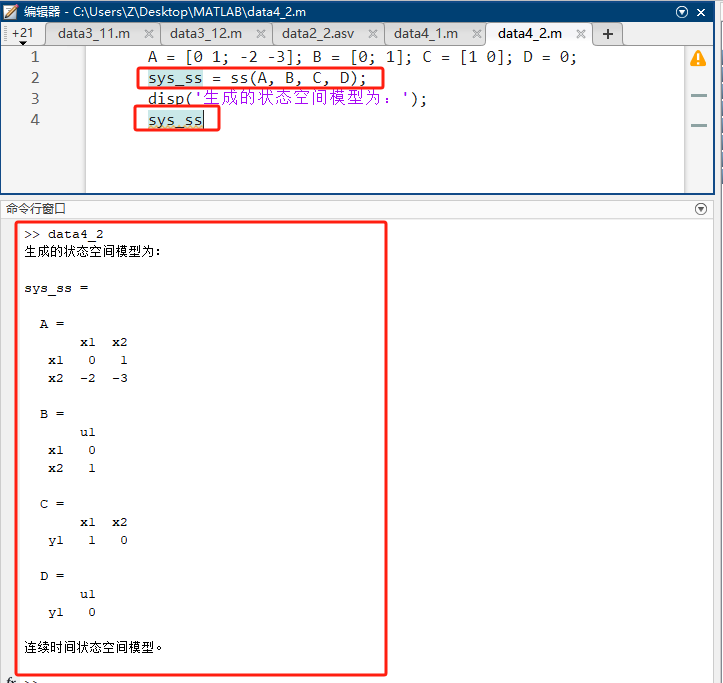
matlabA = [0 1; -2 -3]; B = [0; 1]; C = [1 0]; D = 0; sys_ss = ss(A, B, C, D); disp('生成的状态空间模型为:'); sys_ss -
源码讲解:直接将微分方程组转化为矩阵形式输入。
-
预期输出 :显示 A,B,C,DA, B, C, DA,B,C,D 各矩阵的值。
3. zpk() ------ 创建零极点增益模型
-
功能说明:通过指定系统的零点、极点和增益来建立模型。
-
输入定义 :
z(零点向量),p(极点向量),k(标量增益)。 -
返回值:ZPK 对象。
-
代码示例 :
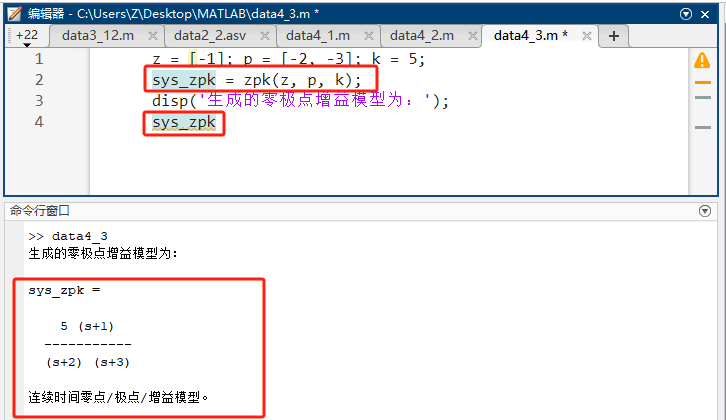
matlabz = [-1]; p = [-2, -3]; k = 5; sys_zpk = zpk(z, p, k); disp('生成的零极点增益模型为:'); sys_zpk -
源码讲解:该形式最能体现稳定性(极点都在左半平面)。
-
预期输出 :5(s+1)/((s+2)(s+3))5(s+1) / ((s+2)(s+3))5(s+1)/((s+2)(s+3))。
4. c2d() ------ 连续系统转离散系统
-
功能说明 :将 sss 域模型转换为数字控制所需的 zzz 域离散模型。
-
输入定义 :连续系统对象
sys, 采样时间Ts。 -
返回值:离散系统对象。
-
代码示例 :
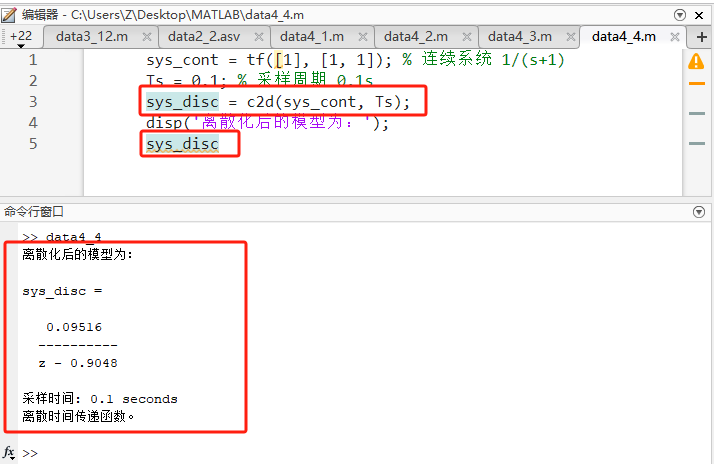
matlabsys_cont = tf([1], [1, 1]); % 连续系统 1/(s+1) Ts = 0.1; % 采样周期 0.1s sys_disc = c2d(sys_cont, Ts); disp('离散化后的模型为:'); sys_disc -
源码讲解:默认采用零阶保持器(ZOH)进行转换。
-
预期输出 :一个关于 zzz 的传递函数。
5. feedback() ------ 系统反馈连接
-
功能说明:计算闭环控制系统的总传递函数。
-
输入定义 :
sys1(前向通路),sys2(反馈通路,默认为单位反馈)。 -
返回值:闭环系统对象。
-
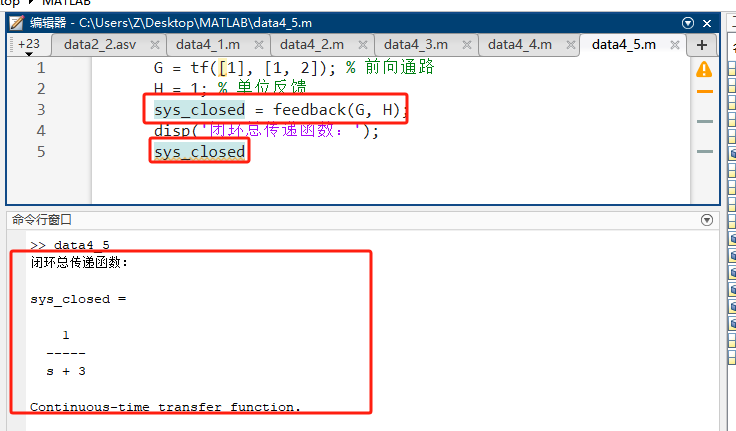
代码示例 :
matlabG = tf([1], [1, 2]); % 前向通路 H = 1; % 单位反馈 sys_closed = feedback(G, H); disp('闭环总传递函数:'); sys_closed -
源码讲解 :实现公式 G/(1+GH)G / (1 + GH)G/(1+GH),如果最后加个参数
-1可表示正反馈。 -
预期输出 :化简后的闭环传递函数。
6. minreal() ------ 最小实现(消除零极点对)
-
功能说明:自动约去分子分母中相同或极接近的零极点项。
-
代码示例 :
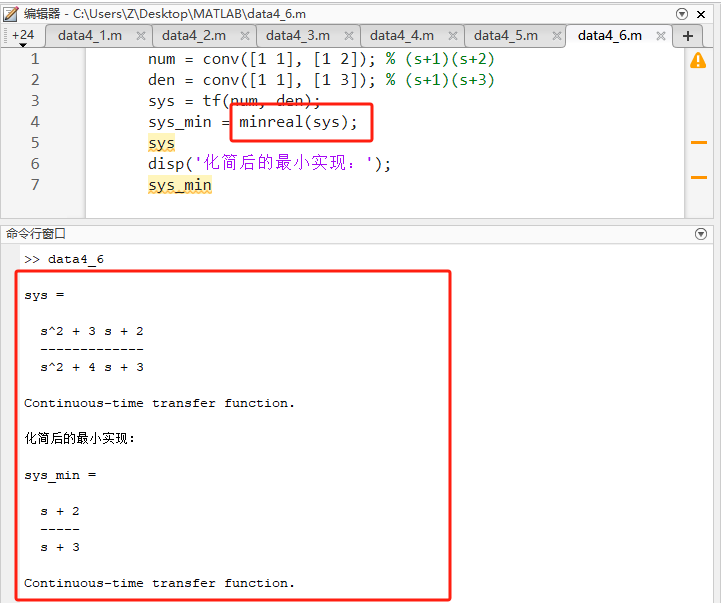
matlabnum = conv([1 1], [1 2]); % (s+1)(s+2) den = conv([1 1], [1 3]); % (s+1)(s+3) sys = tf(num, den); sys_min = minreal(sys); sys disp('化简后的最小实现:'); sys_min -
源码讲解 :
conv用于多项式相乘。minreal发现了分子分母都有 (s+1)(s+1)(s+1) 并将其消去。 -
预期输出 :
(s + 2) / (s + 3)。
三、语法知识:多项式处理
在控制系统建模中,我们经常需要处理形如 G(s)=num(s)den(s)G(s) = \frac{num(s)}{den(s)}G(s)=den(s)num(s) 的分式。而 num(s)num(s)num(s) 和 den(s)den(s)den(s) 通常是多个括号相乘(因式形式)或者是一串长长的多项式。
为了高效地建立模型,MATLAB 提供了专门处理多项式的"三剑客":conv、roots 和 poly。以下是详细的示例与代码讲解:
1. conv(p1, p2) ------ 多项式相乘
- 原理 :在数学中,多项式相乘对应于系数向量的卷积运算。
- 功能:计算两个多项式相乘后的系数。
- 场景 :当你已知系统的各个环节(如:s+1s+1s+1 和 s+2s+2s+2),想求它们的乘积作为传递函数的分母时。
可执行例子:
matlab
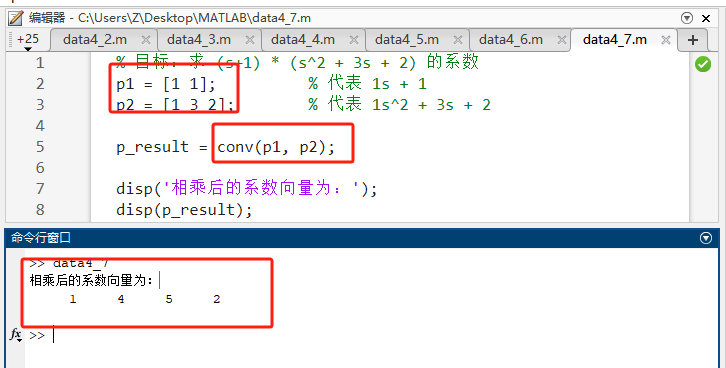
% 目标:求 (s+1) * (s^2 + 3s + 2) 的系数
p1 = [1 1]; % 代表 1s + 1
p2 = [1 3 2]; % 代表 1s^2 + 3s + 2
p_result = conv(p1, p2);
disp('相乘后的系数向量为:');
disp(p_result);
% 验证结果:手动计算应为 s^3 + 4s^2 + 5s + 2- 源码讲解 :输入参数是两个按 sss 的降幂排列的系数向量。返回的是相乘后新多项式的系数向量。
- 预期输出 :
1 4 5 2
2. roots(p) ------ 求多项式的根(找极点/零点)
- 原理 :求解代数方程 P(s)=0P(s) = 0P(s)=0。
- 功能:输入多项式系数,返回所有的根。
- 场景 :在控制理论中,分母多项式的根就是系统的极点,直接决定了系统是否稳定。
可执行例子:
matlab
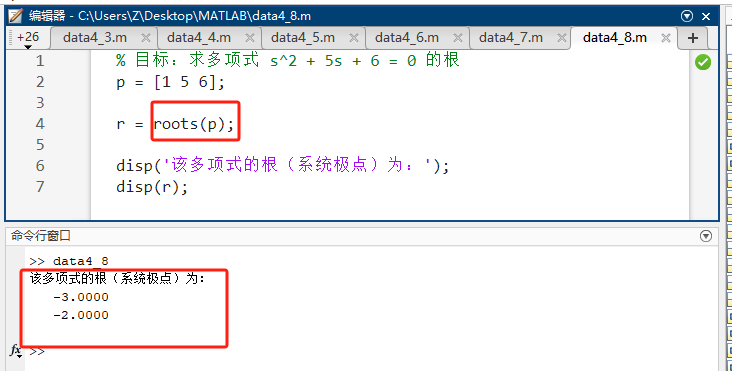
% 目标:求多项式 s^2 + 5s + 6 = 0 的根
p = [1 5 6];
r = roots(p);
disp('该多项式的根(系统极点)为:');
disp(r);-
源码讲解 :输入
p是系数向量。返回的r是一个列向量,包含该方程所有的解。 -
预期输出 :
text-3 -2
3. poly(r) ------ 已知根求多项式(还原系数)
- 原理 :它是
roots的逆运算。已知 r1,r2...rnr_1, r_2...r_nr1,r2...rn,计算 (s−r1)(s−r2)...(s−rn)(s-r_1)(s-r_2)...(s-r_n)(s−r1)(s−r2)...(s−rn)。 - 功能:输入一组根,返回多项式的系数向量。
- 场景 :当你设计了一个控制器,希望它的极点配置在 −1-1−1 和 −5-5−5 时,通过这个函数可以反求出分母多项式的系数。
可执行例子:
matlab
% 目标:已知根为 -1 和 -5,求对应的多项式系数
roots_vec = [-1; -5];
p_back = poly(roots_vec);
disp('还原后的多项式系数为:');
disp(p_back);
% 验证结果:(s+1)(s+5) = s^2 + 6s + 5,对应系数 [1 6 5]- 源码讲解 :输入可以是行向量或列向量形式的根。注意,返回的系数向量第一个元素通常是
1(最高次项系数)。 - 预期输出 :
1 6 5
综合运用:建立一个复杂的传递函数
任务 :建立 G(s)=5(s+1)(s+2)(s+3)(s+4)G(s) = \frac{5(s+1)}{(s+2)(s+3)(s+4)}G(s)=(s+2)(s+3)(s+4)5(s+1)
matlab
% 1. 处理分子
num = 5 * [1 1]; % 5s + 5
% 2. 处理分母:连续使用 conv
den = conv([1 2], [1 3]); % 先算 (s+2)(s+3)
den = conv(den, [1 4]); % 再乘 (s+4)
% 3. 生成模型
sys = tf(num, den);
disp('生成的系统模型为:');
sys预期输出:
text
5 s + 5
-----------------------
s^3 + 9 s^2 + 26 s + 24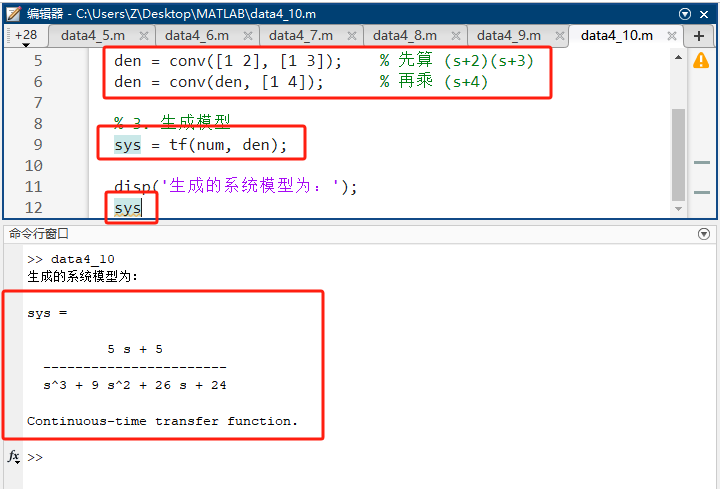
四、 第四章 关于 Simulink 的知识
在这一章中,你需要掌握如何把 MATLAB 定义的模型丢进 Simulink:
LTI System模块 :在 Simulink 中拖入这个模块,在参数栏直接填入你在 MATLAB 里定义的变量名(如sys_tf)。Transfer Fcn模块 :手动在参数框输入[1, 2]和[1, 3, 10]。- 观察模型 :使用
Scope模块查看这些数学模型对阶跃信号的初步响应。
本章复习建议
关键实验 :
请尝试将一个传递函数 tf 用 ss() 转换成状态空间,再用 tf() 转回来。
matlab
G = tf([1], [1, 2, 1]);
sys_ss = ss(G); % 转状态空间
G_back = tf(sys_ss); % 转回传递函数- 注意 :有时候转回来会出现微小的数值余项(例如 10−1610^{-16}10−16),这时候配合使用
minreal()效果更佳。