代码解读------图片分类
一、交叉熵损失函数
CrossEntropyLoss()交叉熵损失函数,
用于多分类任务,
功能:
1.能够计算预测值与真实值之间的差异
2.衡量模型分类的准确性
3.为反向传播提供梯度信号
二、优化器设置:
optimizer = torch.optim.AdamW(model.parameters(), lr=lr, weight_decay=1e-4)
weight_decay:添加权重衰减度,函数中加入权重平方和
限制权重的增长,防止模型参数变化过大
三、半监督的过程
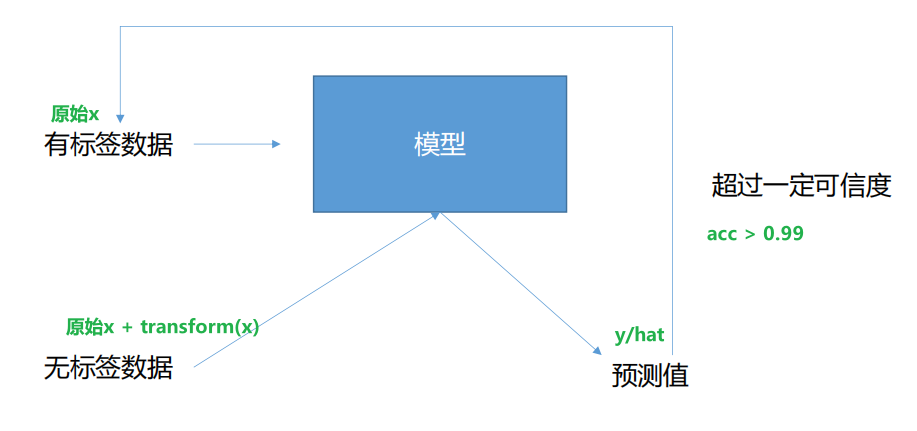
1、数据准备:
收集数据集 DDD。
将其划分为两部分:
Dl=(xi,yi)i=1LD_l = { (x_i, y_i) }{i=1}^LDl=(xi,yi)i=1L:带标签的数据集,数量 LLL 通常较小。
Du=xjj=1UD_u = { x_j }{j=1}^UDu=xjj=1U:未带标签的数据集,数量 UUU 通常远大于 LLL (U≫LU \gg LU≫L)。
2、选择模型:
选择一个合适的机器学习模型 fff。这个模型可以是分类器(如 SVM、神经网络)或回归器,取决于任务类型(分类或回归)。
模型 fff 的目标是学习一个从输入 xxx 到输出 yyy 的映射 y=f(x;θ)y = f(x; \theta)y=f(x;θ),其中 θ\thetaθ 是模型的参数。
3、设计损失函数:
半监督学习的损失函数 LLL 通常由两部分组成:
(1)监督损失 LsL_sLs: 衡量模型在带标签数据 DlD_lDl 上的预测误差。对于分类任务,常用交叉熵损失;对于回归任务,常用均方误差。其形式通常为: Ls=1L∑(xi,yi)∈Dlℓ(f(xi),yi) L_s = \frac{1}{L} \sum_{(x_i, y_i) \in D_l} \ell(f(x_i), y_i) Ls=L1(xi,yi)∈Dl∑ℓ(f(xi),yi) 其中 ℓ\ellℓ 是具体的损失函数(如交叉熵)。
(2)无监督损失 LuL_uLu: 衡量模型在无标签数据 DuD_uDu 上预测结果的某种"一致性"、"平滑性"或"结构性"。这是利用无标签数据的关键所在。
4、训练过程:
总损失函数 LLL 通常是监督损失和无监督损失的加权和: L=Ls+λLu L = L_s + \lambda L_u L=Ls+λLu 其中 λ\lambdaλ 是一个超参数,用于平衡两者的重要性。
使用优化算法(如随机梯度下降 SGD)最小化总损失 LLL,同时更新模型参数 θ\thetaθ。训练过程中会同时使用 DlD_lDl 和 DuD_uDu。
对于伪标签等方法,训练过程可能是迭代的:训练模型 -> 生成伪标签 -> 加入训练集 -> 重新训练模型。
5、评估:
在一个独立的、从未参与训练的带标签测试集上评估模型的性能(如准确率、F1 值等)。
目标是证明相较于仅使用少量标签数据 DlD_lDl 训练的纯监督模型,半监督模型性能有显著提升。
总结:
利用无标签数据的内在结构: 半监督学习有效的前提假设是,数据本身具有一定的内在结构(如聚类结构、流形结构)。
带标签数据提供了"锚点",而无标签数据则帮助模型更好地理解和泛化这种结构。
四、transform
1.在计算机几何学中对几何图像进行空间操作,平移、旋转、缩放、错切
数据预处理的工具
- 保证数据的多样性,提高泛化能力
python
train_transform = transforms.Compose(
[
transforms.ToPILImage(), #224, 224, 3模型 :3, 224, 224 #数据格式转化
transforms.RandomResizedCrop(224), #随机拆解并调整大小
transforms.RandomRotation(50),#随机旋转最多50°
transforms.ToTensor()
]
)- 没有旋转裁剪,为了保证数据的原始行
python
val_transform = transforms.Compose(
[
transforms.ToPILImage(), #224, 224, 3模型 :3, 224, 224
transforms.ToTensor()
]
)2.神经网络运用(见后面博客)
- 自注意力: 让模型在处理序列中某个元素时,关注序列中所有其他元素并权衡其重要性。
- 多头注意力:并行运行多个自注意力机制,捕捉不同子空间的信息。
- 位置编码: 为输入序列添加位置信息(如正弦/余弦函数),因为模型本身不包含顺序信息。
- 前馈神经网络: 对自注意力输出进行进一步处理。
- 残差连接和层归一化: 帮助稳定训练和提升性能。
- 应用: BERT, GPT系列等大型语言模型的核心架构。
五、matplotlib.pyplot as plt
用于画图
plt常用的调用函数
- plt.scatter() 散点图
- plt.plot(): 折线图
- plt.title() :设置标题
- plt.xlabel():设置x标签
- plt.legend() 显示图例
- plt.show(): 显示图表
python
plt.plot(plt_train_loss)
plt.plot(plt_val_loss)
plt.title("loss")
plt.legend(["train", "val"])
plt.show()
plt.plot(plt_train_acc)
plt.plot(plt_val_acc)
plt.title("acc")
plt.legend(["train", "val"])
plt.show()六、定义函数------读数据集
有标签和无标签读取数据的方式不同
初始化都需要将x放到创建的np.zero中
python
xi = np.zeros((len(file_list), HW, HW, 3), dtype=np.uint8) # 创建形状,用于存储图像1、无标签,无需读取y
python
if self.mode == "semi": # 无标签数据
file_list = os.listdir(path)
xi = np.zeros((len(file_list), HW, HW, 3), dtype=np.uint8) # 创建形状,用于存储图像
# 列出文件夹下所有文件名字
for j, img_name in enumerate(file_list): # 遍历所有图片 j为索引,img_name为文件名
img_path = os.path.join(path, img_name) # 获取指定路径下的文件路径
img = Image.open(img_path)
img = img.resize((HW, HW)) # 重新将图像调整为3x224x224
xi[j, ...] = img # 将处理后的图像存入到创建的形状中, 省略号:所有剩余维度
print("读到了%d个数据" % len(xi))
return xi2、 有标签
有y需要读取
python
for i in tqdm(range(11)):
file_dir = path + "/%02d" % i
file_list = os.listdir(file_dir)
xi = np.zeros((len(file_list), HW, HW, 3), dtype=np.uint8)
yi = np.zeros(len(file_list), dtype=np.uint8)
# 列出文件夹下所有文件名字
for j, img_name in enumerate(file_list):
img_path = os.path.join(file_dir, img_name)
img = Image.open(img_path)
img = img.resize((HW, HW))
xi[j, ...] = img
yi[j] = i
if i == 0:
X = xi
Y = yi
else:
X = np.concatenate((X, xi), axis=0) # 与其他数据进行垂直拼接 形成一个矩阵,确保数据图像X能够与Y一一对应
Y = np.concatenate((Y, yi), axis=0)
print("读到了%d个数据" % len(Y))七、定义函数------调用模型
train_val(model, train_loader, val_loader, no_label_loader, device, epochs, optimizer, loss, thres, save_path)
- model:传入要训练的模型,这里使用initialize_model包导入需要的模型
- train_loader、val_loader、no_label_loader: 将数据加载
- device:指定模型和数据运行的设备
- epochs: 训练轮数,
- optimizer:优化器负责更新模型参数
- loss:计算预测值与真实值的误差
- thres: 半监督学习的置信度阈值,用于筛选置信度高的无标签版本
- save_path:指定最好模型的保存路径
这里优化可以使用字典 进行管理
python
trainpara = {
"model" : model,
'train_loader': train_loader,
'val_loader': val_loader,
'no_label_Loader': no_label_Loader,
'optimizer': optimizer,
'batchSize': batchSize,
'loss': loss,
'epoch': epoch,
'device': device,
'save_path': save_path,
'save_acc': True,
'max_acc': 0.5,
'val_epoch' : 1,
'acc_thres' : 0.7,
'conf_thres' : 0.99,
'do_semi' : True,
"pre_path" : None
}
# 使用字典传递参数,避免函数参数过多,便于快速定位操作修改
if __name__ == '__main__':
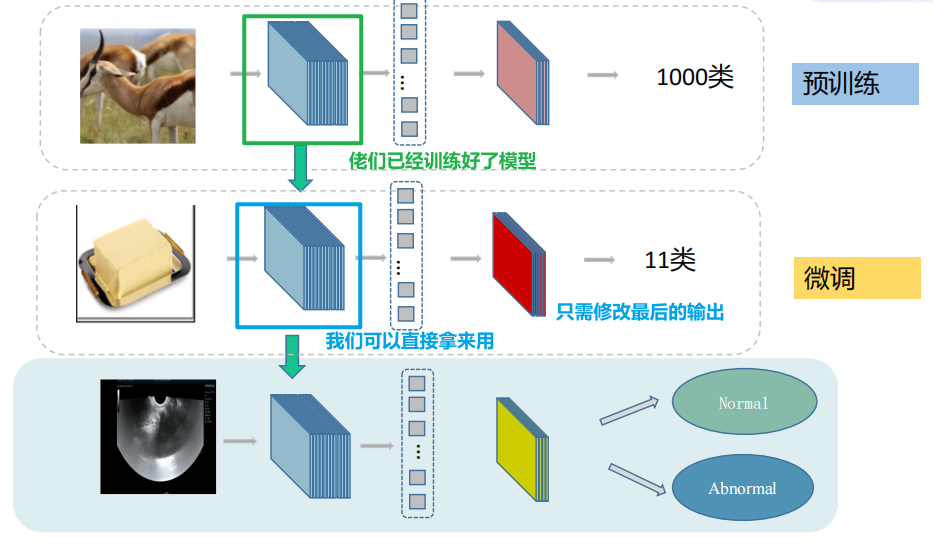
train_val(trainpara)1、initialize_model
就是迁移学习:用别人已经预训练好的数据即可,我们只需要调参
python
model, _ = initialize_model("vgg", 11, use_pretrained=True)传入模型名字,和分类数, 返回你想要的模型
- num_class 最后指定输出的神经元数量,
- linear_prob 是否为线性探测,当为True时 冻结特征提取器,只训练分类头。 为False是才是允许进行参数更新
- use_pretrained 是否使用预训练的模型参数。默认是使用预训练的模型参数
python
def initialize_model(model_name, num_classes, linear_prob=False, use_pretrained=True):
# 初始化将在此if语句中设置的这些变量。
# 每个变量都是模型特定的。
model_ft = None
input_size = 0
if model_name =="MyModel":
if use_pretrained == True:
model_ft = torch.load('model_save/MyModel')
else:
model_ft = MyModel(num_classes)
input_size = 224
elif model_name == "resnet18":
""" Resnet18
"""
model_ft = models.resnet18(pretrained=use_pretrained) # 从网络下载模型 pretrain true 使用参数和架构, false 仅使用架构。
set_parameter_requires_grad(model_ft, linear_prob) # 是否为线性探测,Ture:冻结特征提取器,只训练分类头。 False:允许参数更新。
num_ftrs = model_ft.fc.in_features #获取分类头的输入维度
model_ft.fc = nn.Linear(num_ftrs, num_classes) # 用新的替换原来分类头, 更改最后一层为想要的分类数的分类头。
input_size = 224主要是
确定使用什么模型 + 是否使用该架构的参数 + 哪些参数可以更新 + 修改最后架构的输出
2、训练模式
train_loss += train_bat_loss.cpu().item() # 求平均损失
- .cpu() 将顺势张量从GPU转移到CPU内存
- .item() 用于累加计算
python
train_acc += np.sum(np.argmax(pred.detach().cpu().numpy(), axis=1) == target.cpu().numpy()) # 求准确率- detach():从张量网上面摘下来,断开梯度追踪
- cpu() : 从GPU -> CPU
- numpy(): 将tensor 转化成 numpy用于计算
- np.argmax(,axis=1)获取每一个行的最大索引,就是模型的类别
- == target.cpu().numpy() 与真实标签进行比较
- numpy.sum():统计预测正确的模型数量
累加当前批次中预测正确的样本数,累加到总准确率统计中,用于后续计算模型的准确率
python
plt_train_loss.append(train_loss / train_loader.__len__())计算当前epoch的平均训练损失,并且追加到plt_train_loss()
python
plt_train_acc.append(train_acc/train_loader.dataset.__len__()) #记录准确率,计算当前epoch的平均准确损失,并且追加到plt_train_acc()
python
if epoch%3 == 0 and plt_val_acc[-1] > 0.6:
semi_loader = get_semi_loader(no_label_loader, model, device, thres)每3个epoch执行一次半监督学习,当最后一个准确率超过0.6时才能启用进行半监督学习
python
def get_semi_loader(no_label_loder, model, device, thres):
semiset = semiDataset(no_label_loder, model, device, thres)
if semiset.flag == False:
return None
else:
semi_loader = DataLoader(semiset, batch_size=16, shuffle=False)
return semi_loader使用semiDataSet可以进行加载数据,
如果flag == false : 没有找到置信度超过阈值的样本数据
返回为None ,无标签数据不会作为训练数据
else flag 为True ,则该无标签数据会进入模型进行训练
python
if val_acc > max_acc:
torch.save(model, save_path)
max_acc = val_acc保存性能最佳的模型版本,记录更新最高准确率
3、验证模式
python
model.eval()
with torch.no_grad(): # 去除梯度
for batch_x, batch_y in val_loader:
x, target = batch_x.to(device), batch_y.to(device)
pred = model(x)
val_bat_loss = loss(pred, target)
val_loss += val_bat_loss.cpu().item()
val_acc += np.sum(np.argmax(pred.detach().cpu().numpy(), axis=1) == target.cpu().numpy())
plt_val_loss.append(val_loss / val_loader.__len__())
plt_val_acc.append(val_acc / val_loader.dataset.__len__())4、模型设置
独立层定义 vs 容器定义
python
# 独立层定义
self.conv1 = nn.Conv2d(3, 64, 3, 1, 1) # 64*224*224
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU()
self.pool1 = nn.MaxPool2d(2) #64*112*112
# 容器层定义
self.layer1 = nn.Sequential(
nn.Conv2d(64, 128, 3, 1, 1), # 128*112*112
nn.BatchNorm2d(128),
nn.ReLU(),
nn.MaxPool2d(2) #128*56*56独立定义
1、 每层单独命名和管理
2、 在forward中需要逐个调用
容器式定义(推荐,更简单在forward调用中)
1、多层封装在一个容器里面
2、 可以一次性调用整个容器的序列
下面就是forward的书写
python
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.pool1(x)
x = self.layer1(x)可以看出是非常简单的调用
最后汇总
python
import random
import torch
import torch.nn as nn
import numpy as np
import os
from PIL import Image #读取图片数据
from torch.utils.data import Dataset, DataLoader
from tqdm import tqdm
from torchvision import transforms
import time
import matplotlib.pyplot as plt
from model_utils.model import initialize_model
def seed_everything(seed):
torch.manual_seed(seed)
torch.cuda.manual_seed(seed)
torch.cuda.manual_seed_all(seed)
torch.backends.cudnn.benchmark = False
torch.backends.cudnn.deterministic = True
random.seed(seed)
np.random.seed(seed)
os.environ['PYTHONHASHSEED'] = str(seed)
#################################################################
seed_everything(0)
###############################################
HW = 224
# 数据预处理的工具
# 保证数据的多样性,提高泛化能力
train_transform = transforms.Compose(
[
transforms.ToPILImage(), #224, 224, 3模型 :3, 224, 224 #数据格式转化
transforms.RandomResizedCrop(224), #随机拆解并调整大小
transforms.RandomRotation(50),#随机旋转最多50°
transforms.ToTensor()
]
)
# 没有旋转裁剪,为了保证数据的原始行,
val_transform = transforms.Compose(
[
transforms.ToPILImage(), #224, 224, 3模型 :3, 224, 224
transforms.ToTensor()
]
)
class food_Dataset(Dataset):
def __init__(self, path, mode="train"):
self.mode = mode
if mode == "semi":
self.X = self.read_file(path) #半监督数据只有x
else:
self.X, self.Y = self.read_file(path) # 训练数据有标签+验证数据
self.Y = torch.LongTensor(self.Y) #标签转为长整形\
if mode == "train":
self.transform = train_transform # 训练数据需要对图片进行操作
else:
self.transform = val_transform # 验证数据无需对图片进行操作
def read_file(self, path):
if self.mode == "semi": # 无标签数据
file_list = os.listdir(path)
xi = np.zeros((len(file_list), HW, HW, 3), dtype=np.uint8) # 创建形状,用于存储图像
# 列出文件夹下所有文件名字
for j, img_name in enumerate(file_list): # 遍历所有图片 j为索引,img_name为文件名
img_path = os.path.join(path, img_name) # 获取指定路径下的文件路径
img = Image.open(img_path)
img = img.resize((HW, HW)) # 重新将图像调整为3x224x224
xi[j, ...] = img # 将处理后的图像存入到创建的形状中, 省略号:所有剩余维度
print("读到了%d个数据" % len(xi))
return xi
else: # 训练数据有标签+验证数据
for i in tqdm(range(11)):
file_dir = path + "/%02d" % i
file_list = os.listdir(file_dir)
xi = np.zeros((len(file_list), HW, HW, 3), dtype=np.uint8)
yi = np.zeros(len(file_list), dtype=np.uint8)
# 列出文件夹下所有文件名字
for j, img_name in enumerate(file_list):
img_path = os.path.join(file_dir, img_name)
img = Image.open(img_path)
img = img.resize((HW, HW))
xi[j, ...] = img
yi[j] = i
if i == 0:
X = xi
Y = yi
else:
X = np.concatenate((X, xi), axis=0) # 与其他数据进行垂直拼接 形成一个矩阵,确保数据图像X能够与Y一一对应
Y = np.concatenate((Y, yi), axis=0)
print("读到了%d个数据" % len(Y))
return X, Y
def __getitem__(self, item):
if self.mode == "semi":
return self.transform(self.X[item]), self.X[item]
else:
return self.transform(self.X[item]), self.Y[item]
def __len__(self):
return len(self.X)
class semiDataset(Dataset):
def __init__(self, no_label_loder, model, device, thres=0.99):
x, y = self.get_label(no_label_loder, model, device, thres)
if x == []:
self.flag = False
else:
self.flag = True
self.X = np.array(x)
self.Y = torch.LongTensor(y)
self.transform = train_transform
def get_label(self, no_label_loder, model, device, thres):
model = model.to(device)
pred_prob = [] # 保存模型输出的概率
labels = [] # 预测的标签
x = []
y = []
soft = nn.Softmax() # 将模型输出转化成概率分布
with torch.no_grad(): # 禁用梯度
for bat_x, _ in no_label_loder:
bat_x = bat_x.to(device)
pred = model(bat_x)
pred_soft = soft(pred)
pred_max, pred_value = pred_soft.max(1) # 获得最大概率
pred_prob.extend(pred_max.cpu().numpy().tolist()) # 将概率和预测标签添加到相应列表
labels.extend(pred_value.cpu().numpy().tolist())
for index, prob in enumerate(pred_prob): # 遍历标签和概率
if prob > thres: # 只处理高于阈值的样本
x.append(no_label_loder.dataset[index][1]) #调用到原始的getitem
y.append(labels[index]) # 将预测标签添加到列表
return x, y
def __getitem__(self, item):
return self.transform(self.X[item]), self.Y[item]
def __len__(self):
return len(self.X)
def get_semi_loader(no_label_loder, model, device, thres):
semiset = semiDataset(no_label_loder, model, device, thres)
if semiset.flag == False: # 无半监督数据,没有找到置信度超过阈值的样本数据
return None
else:
semi_loader = DataLoader(semiset, batch_size=16, shuffle=False)
return semi_loader
class myModel(nn.Module):
def __init__(self, num_class):
super(myModel, self).__init__()
#3 *224 *224 -> 512*7*7 -> 拉直 -》全连接分类
self.conv1 = nn.Conv2d(3, 64, 3, 1, 1) # 64*224*224
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU()
self.pool1 = nn.MaxPool2d(2) #64*112*112
self.layer1 = nn.Sequential(
nn.Conv2d(64, 128, 3, 1, 1), # 128*112*112
nn.BatchNorm2d(128),
nn.ReLU(),
nn.MaxPool2d(2) #128*56*56
)
self.layer2 = nn.Sequential(
nn.Conv2d(128, 256, 3, 1, 1),
nn.BatchNorm2d(256),
nn.ReLU(),
nn.MaxPool2d(2) #256*28*28
)
self.layer3 = nn.Sequential(
nn.Conv2d(256, 512, 3, 1, 1),
nn.BatchNorm2d(512),
nn.ReLU(),
nn.MaxPool2d(2) #512*14*14
)
self.pool2 = nn.MaxPool2d(2) #512*7*7
self.fc1 = nn.Linear(25088, 1000) #25088->1000
self.relu2 = nn.ReLU()
self.fc2 = nn.Linear(1000, num_class) #1000-11
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.pool1(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.pool2(x)
x = x.view(x.size()[0], -1)
x = self.fc1(x)
x = self.relu2(x)
x = self.fc2(x)
return x
def train_val(model, train_loader, val_loader, no_label_loader, device, epochs, optimizer, loss, thres, save_path):
model = model.to(device)
semi_loader = None
plt_train_loss = []
plt_val_loss = []
plt_train_acc = []
plt_val_acc = []
max_acc = 0.0
for epoch in range(epochs):
train_loss = 0.0
val_loss = 0.0
train_acc = 0.0
val_acc = 0.0
semi_loss = 0.0
semi_acc = 0.0
start_time = time.time()
model.train() # 训练模式
for batch_x, batch_y in train_loader: # 训练
x, target = batch_x.to(device), batch_y.to(device) # 将数据移动到GPU
pred = model(x) # 前向传播
train_bat_loss = loss(pred, target) # 计算损失
train_bat_loss.backward() # 梯度回传, 反向传播。
optimizer.step() # 更新参数 之后要梯度清零否则会累积梯度
optimizer.zero_grad() # 梯度清零
train_loss += train_bat_loss.cpu().item() # 求平均损失
train_acc += np.sum(np.argmax(pred.detach().cpu().numpy(), axis=1) == target.cpu().numpy()) # 求准确率
plt_train_loss.append(train_loss / train_loader.__len__())
plt_train_acc.append(train_acc/train_loader.dataset.__len__()) #记录准确率,
if semi_loader!= None:
for batch_x, batch_y in semi_loader:
x, target = batch_x.to(device), batch_y.to(device)
pred = model(x)
semi_bat_loss = loss(pred, target)
semi_bat_loss.backward()
optimizer.step() # 更新参数 之后要梯度清零否则会累积梯度
optimizer.zero_grad()
semi_loss += train_bat_loss.cpu().item()
semi_acc += np.sum(np.argmax(pred.detach().cpu().numpy(), axis=1) == target.cpu().numpy())# 求出预测与实际相同的个数
print("半监督数据集的训练准确率为", semi_acc/train_loader.dataset.__len__())
model.eval()
with torch.no_grad(): # 去除梯度
for batch_x, batch_y in val_loader:
x, target = batch_x.to(device), batch_y.to(device)
pred = model(x)
val_bat_loss = loss(pred, target)
val_loss += val_bat_loss.cpu().item()
val_acc += np.sum(np.argmax(pred.detach().cpu().numpy(), axis=1) == target.cpu().numpy())
plt_val_loss.append(val_loss / val_loader.__len__())
plt_val_acc.append(val_acc / val_loader.dataset.__len__())
if epoch%3 == 0 and plt_val_acc[-1] > 0.6: # 取最后的准确率 高于 0.6,再查看有无半监督数据,将半监督数据加入到数据集
semi_loader = get_semi_loader(no_label_loader, model, device, thres)
if val_acc > max_acc: # 保存最佳数据预测率
torch.save(model, save_path)
max_acc = val_acc
print('[%03d/%03d] %2.2f sec(s) TrainLoss : %.6f | valLoss: %.6f Trainacc : %.6f | valacc: %.6f' % \
(epoch, epochs, time.time() - start_time, plt_train_loss[-1], plt_val_loss[-1], plt_train_acc[-1], plt_val_acc[-1])
) # 打印训练结果。 注意python语法, %2.2f 表示小数位为2的浮点数, 后面可以对应。
plt.plot(plt_train_loss)
plt.plot(plt_val_loss)
plt.title("loss")
plt.legend(["train", "val"])
plt.show()
plt.plot(plt_train_acc)
plt.plot(plt_val_acc)
plt.title("acc")
plt.legend(["train", "val"])
plt.show()
# path = r"F:\pycharm\beike\classification\food_classification\food-11\training\labeled"
# train_path = r"F:\pycharm\beike\classification\food_classification\food-11\training\labeled"
# val_path = r"F:\pycharm\beike\classification\food_classification\food-11\validation"
train_path = r"F:\pycharm\beike\classification\food_classification\food-11_sample\training\labeled"
val_path = r"F:\pycharm\beike\classification\food_classification\food-11_sample\validation"
no_label_path = r"F:\pycharm\beike\classification\food_classification\food-11_sample\training\unlabeled\00"
train_set = food_Dataset(train_path, "train")
val_set = food_Dataset(val_path, "val")
no_label_set = food_Dataset(no_label_path, "semi")
train_loader = DataLoader(train_set, batch_size=16, shuffle=True)
val_loader = DataLoader(val_set, batch_size=16, shuffle=True)
no_label_loader = DataLoader(no_label_set, batch_size=16, shuffle=False) #不能打乱,否则最后货不对板
# model = myModel(11)
# use------pretrained= True使用加载大规模的数据上面已经运行训练好的参数,如果是False使用随机初始化权重,从0开始训练
model, _ = initialize_model("vgg", 11, use_pretrained=True)
lr = 0.01
loss = nn.CrossEntropyLoss() # 交叉熵损失函数,用于多分类任务
optimizer = torch.optim.AdamW(model.parameters(), lr=lr, weight_decay=1e-4)# 权重衰减:防止模型参数变化过大
device = "cuda" if torch.cuda.is_available() else "cpu"
save_path = "model_save/best_model.pth"
epochs = 15 # 循环轮数
thres = 0.99 # 置信度阈值
train_val(model, train_loader, val_loader, no_label_loader, device, epochs, optimizer, loss, thres, save_path)