ARM 汇编语言语法小解
📚 系列文章提示
本文来自《ARM汇编指令深入解析》系列教程。如果你想要:
- 查找其他ARM汇编指令的讲解
- 了解本系列的整体结构
- 按顺序系统学习ARM汇编
请访问:系列导读与目录总览
文章目录
- [ARM 汇编语言语法小解](#ARM 汇编语言语法小解)
-
- 一、基本架构特点
- 二、基本语法结构
-
- [1. 指令格式](#1. 指令格式)
- [2. 程序组成](#2. 程序组成)
- 三、寄存器
-
- [1. 通用寄存器(32位)](#1. 通用寄存器(32位))
- [2. 特殊寄存器](#2. 特殊寄存器)
- 四、指令分类与语法
-
- [1. 数据处理指令](#1. 数据处理指令)
- [2. 加载/存储指令](#2. 加载/存储指令)
- [3. 分支指令](#3. 分支指令)
- [4. 移位操作](#4. 移位操作)
- 五、寻址方式
-
- [1. 立即数寻址](#1. 立即数寻址)
- [2. 寄存器寻址](#2. 寄存器寻址)
- [3. 寄存器间接寻址](#3. 寄存器间接寻址)
- [4. 基址加偏移寻址](#4. 基址加偏移寻址)
- [5. 前变址/后变址寻址](#5. 前变址/后变址寻址)
- 六、条件执行
-
- [1. 条件码后缀](#1. 条件码后缀)
- [2. 条件执行示例](#2. 条件执行示例)
- 七、伪指令和汇编器指示符
-
- [1. 常用伪指令](#1. 常用伪指令)
- [2. 汇编器指示符](#2. 汇编器指示符)
- 八、完整示例程序
- 九、ARM与Thumb模式
- 十、注意事项
- 十一、常用编程模式
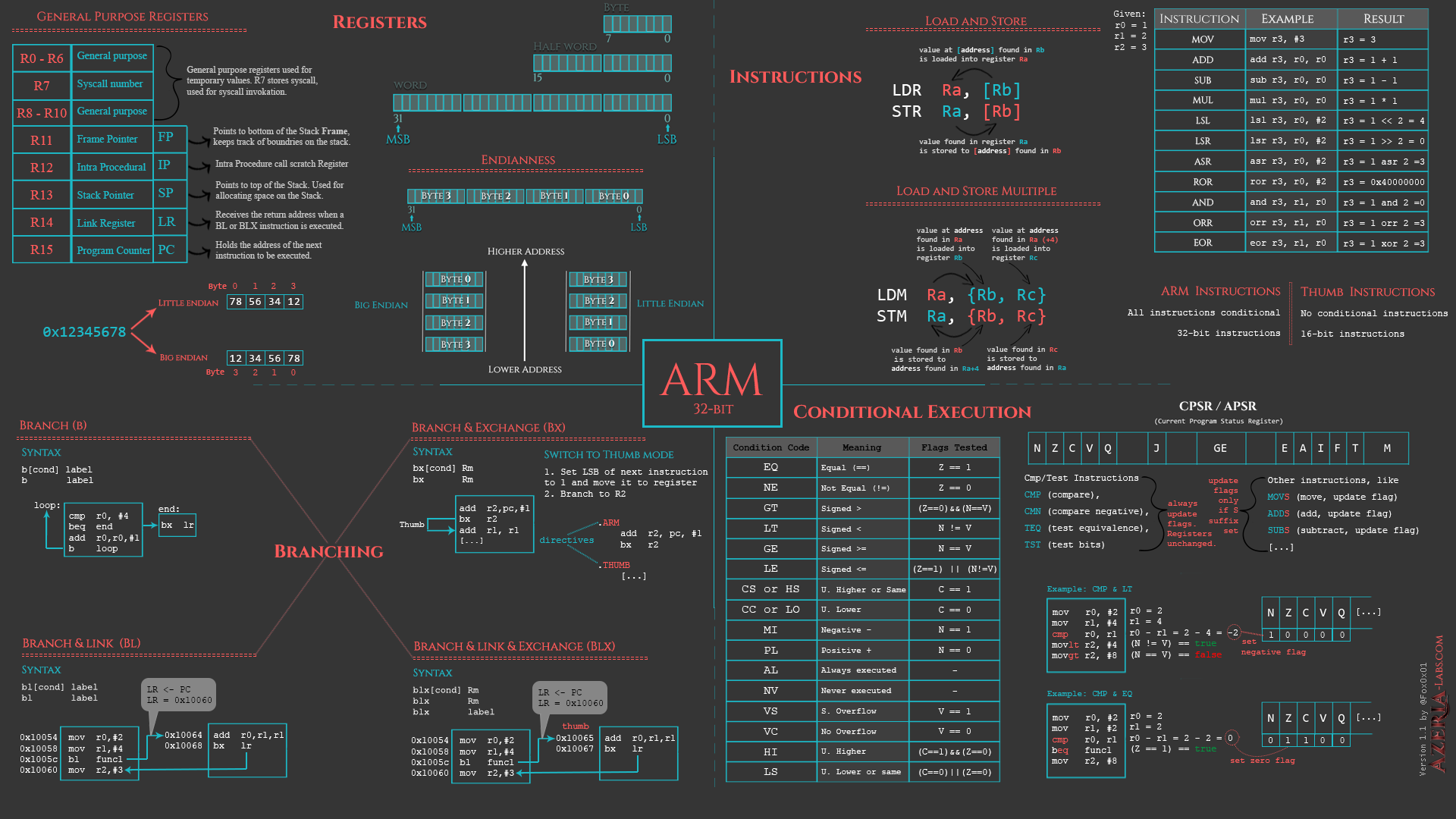
ARM汇编语言是一种低级编程语言,用于直接控制ARM处理器的操作。以下是ARM汇编语言的详细语法介绍:
一、基本架构特点
- RISC架构:精简指令集,大多数指令在一个时钟周期内执行
- 加载/存储架构:只有加载/存储指令可以访问内存,运算指令只操作寄存器
- 统一字长:大多数指令为32位(ARM模式)或16位(Thumb模式)
- 条件执行:几乎所有指令都可以条件执行
二、基本语法结构
1. 指令格式
[label:] mnemonic [operands] [; comment]示例:
assembly
start: ; 标签
MOV R0, #10 ; 将立即数10加载到R0
ADD R1, R0, #5 ; R1 = R0 + 52. 程序组成
- 指令:处理器执行的操作
- 伪指令:汇编器指令,不生成机器码
- 汇编器指示符:控制汇编过程的指令
三、寄存器
1. 通用寄存器(32位)
- R0-R12:通用目的寄存器
- R13 (SP):堆栈指针
- R14 (LR):链接寄存器(保存返回地址)
- R15 (PC):程序计数器
2. 特殊寄存器
- CPSR :当前程序状态寄存器
- N(负标志)、Z(零标志)、C(进位标志)、V(溢出标志)
- 模式位、中断禁止位等
四、指令分类与语法
1. 数据处理指令
OPcode{S}{cond} Rd, Rn, Operand2- S:可选,更新条件标志
- cond:条件码(可选)
- Rd:目标寄存器
- Rn:第一操作数寄存器
- Operand2:第二操作数(寄存器/立即数/移位寄存器)
常见指令:
assembly
MOV R0, #0x3F ; 传送立即数
ADD R1, R2, R3 ; 加法:R1 = R2 + R3
SUB R4, R5, #10 ; 减法:R4 = R5 - 10
AND R0, R1, R2 ; 按位与
ORR R3, R4, #0xFF ; 按位或
EOR R5, R6, R7 ; 按位异或
CMP R0, R1 ; 比较,设置标志位2. 加载/存储指令
assembly
LDR Rd, [Rn] ; 从内存加载到寄存器
STR Rd, [Rn] ; 从寄存器存储到内存
LDR Rd, [Rn, #offset] ; 带偏移量的加载
LDMIA Rn!, {reglist} ; 多寄存器加载
STMIA Rn!, {reglist} ; 多寄存器存储3. 分支指令
assembly
B label ; 无条件跳转
BL label ; 带链接的跳转(用于函数调用)
BX Rn ; 跳转到寄存器指定的地址
BEQ label ; 相等时跳转(Z=1)
BNE label ; 不相等时跳转(Z=0)4. 移位操作
assembly
LSL R0, R1, #2 ; 逻辑左移2位
LSR R2, R3, #4 ; 逻辑右移4位
ASR R4, R5, #1 ; 算术右移1位
ROR R6, R7, #8 ; 循环右移8位五、寻址方式
1. 立即数寻址
assembly
MOV R0, #0xFF ; 立即数0xFF
ADD R1, R2, #100 ; 立即数1002. 寄存器寻址
assembly
ADD R0, R1, R2 ; R0 = R1 + R2
MOV R3, R4 ; R3 = R43. 寄存器间接寻址
assembly
LDR R0, [R1] ; R0 = memory[R1]
STR R2, [R3] ; memory[R3] = R24. 基址加偏移寻址
assembly
LDR R0, [R1, #4] ; R0 = memory[R1 + 4]
LDR R0, [R1, R2] ; R0 = memory[R1 + R2]
LDR R0, [R1, R2, LSL #2] ; R0 = memory[R1 + (R2 << 2)]5. 前变址/后变址寻址
assembly
LDR R0, [R1, #4]! ; 前变址:R1 = R1 + 4, 然后加载
LDR R0, [R1], #4 ; 后变址:先加载,然后R1 = R1 + 4六、条件执行
1. 条件码后缀
| 后缀 | 含义 | 条件标志 |
|---|---|---|
| EQ | 相等 | Z=1 |
| NE | 不相等 | Z=0 |
| CS/HS | 进位/无符号>= | C=1 |
| CC/LO | 无进位/无符号< | C=0 |
| MI | 负 | N=1 |
| PL | 正/零 | N=0 |
| VS | 溢出 | V=1 |
| VC | 无溢出 | V=0 |
| HI | 无符号> | C=1且Z=0 |
| LS | 无符号<= | C=0或Z=1 |
| GE | 有符号>= | N=V |
| LT | 有符号< | N!=V |
| GT | 有符号> | Z=0且N=V |
| LE | 有符号<= | Z=1或N!=V |
| AL | 总是执行 | 任何 |
2. 条件执行示例
assembly
CMP R0, R1 ; 比较R0和R1
ADDGT R2, R3, #1 ; 如果R0>R1,则执行
MOVLE R2, #0 ; 如果R0<=R1,则执行七、伪指令和汇编器指示符
1. 常用伪指令
assembly
ADR R0, label ; 加载标签地址(小范围)
LDR R0, =label ; 加载标签地址(大范围)
LDR R0, =0x12345678 ; 加载32位立即数
NOP ; 空操作2. 汇编器指示符
assembly
.global _start ; 声明全局符号
.section .text ; 代码段开始
.align 2 ; 按4字节对齐
.arm ; 使用ARM指令集
.thumb ; 使用Thumb指令集
.word 0x12345678 ; 定义32位数据
.byte 0x12, 0x34 ; 定义字节数据
.ascii "Hello" ; 定义ASCII字符串
.asciz "World" ; 定义以null结尾的字符串
.equ MAX, 100 ; 定义常量八、完整示例程序
assembly
/* ARM汇编示例:计算1+2+...+10 */
.global _start /* 全局入口点 */
.section .text /* 代码段 */
_start:
MOV R0, #0 /* 总和清零 */
MOV R1, #1 /* 计数器从1开始 */
MOV R2, #10 /* 最大值 */
loop:
CMP R1, R2 /* 比较计数器和最大值 */
BGT end /* 如果R1>R2,跳转到结束 */
ADD R0, R0, R1 /* 累加:R0 = R0 + R1 */
ADD R1, R1, #1 /* 计数器加1 */
B loop /* 继续循环 */
end:
/* 此时R0中存储着结果55 */
/* 退出程序(Linux系统调用) */
MOV R7, #1 /* 退出系统调用号 */
MOV R0, #0 /* 返回码0 */
SWI 0 /* 软中断 */
.section .data /* 数据段 */
result: .word 0 /* 存储结果 */九、ARM与Thumb模式
-
ARM模式:
- 32位指令
- 完整的指令集
- 所有指令都可以条件执行
-
Thumb模式:
- 16位指令(也有32位Thumb-2指令)
- 代码密度更高
- 有限的指令集
- 只有分支指令可以条件执行
-
模式切换:
assembly
ADR R0, thumb_code+1
BX R0 ; 切换到Thumb模式
.thumb
thumb_code:
MOV R0, #10 ; Thumb指令十、注意事项
- 立即数限制:ARM立即数必须是8位位图循环移位得到的
- 对齐要求:ARM指令需要4字节对齐,数据访问也有对齐要求
- PC的特殊性:读取PC时返回当前指令地址+8(ARM模式)
- 寄存器使用约定:函数调用时通常使用R0-R3传递参数,R0保存返回值
十一、常用编程模式
- 函数调用:
assembly
/* 调用函数 */
BL function_name
/* ... */
/* 函数定义 */
function_name:
PUSH {R4-R11, LR} /* 保存寄存器和返回地址 */
/* 函数体 */
POP {R4-R11, PC} /* 恢复寄存器并返回 */- 堆栈操作:
assembly
PUSH {R0-R3, LR} /* 压栈多个寄存器 */
POP {R0-R3, PC} /* 出栈并返回 */ARM汇编语言通过其丰富的指令集和灵活的条件执行机制,为底层系统编程提供了强大的控制能力。随着ARM架构的发展(如ARMv8-A的AArch64),语法有所变化,但基本概念保持了一致性。