一、基本显示原理
分辨率与像素
分辨率:800 × 480,表示屏幕由 800 列 × 480 行的像素点组成。
每个像素点由 红(R)、绿(G)、蓝(B) 三个子像素构成,通常采用 RGB888 格式(每通道 8 位),共 24 位颜色深度。
二、接口通信方式
i.MX6ULL 通过 eLCDIF(Enhanced LCD Interface) 控制器与 LCD 屏幕进行通信,采用 单工并行同步传输方式:
| 信号类型 | 数量 | 功能说明 |
|---|---|---|
| 数据线 (data) | 24 根 | 传输 RGB 数据(8r+8g+8b),即每个像素 24 位 |
| 控制线 | 4 根 | 包括 DE、HSYNC、VSYNC、PCLK |
| 地址总线 | 32 位 | 用于 DMA 地址映射(可选) |
| 片选/控制总线 | 1 根 (nRST) | 复位或使能控制 |
三、核心时许信号
LCD 的刷新过程依赖于精确的时钟和同步信号。
1. PCLK(Pixel Clock,像素时钟)
- 是整个系统的基准时钟;
- 每个 PCLK 周期传输一位数据;
2. DE(Data Enable,数据有效)
- 表示当前数据是否有效;
- 在 HSYNC 和 VSYNC 有效期间,DE 为高电平时,数据才被采样;
3. HSYNC(Horizontal Sync,水平同步)
- 控制每一行的开始;
- 低电平有效(负脉冲),持续时间固定;
- 用于同步行扫描。
4. VSYNC(Vertical Sync,垂直同步)
- 控制每一帧的开始;
- 低电平有效,周期长;
- 用于同步场扫描。
四、核心机制
1.行扫描(Horizontal Scan)
工作原理:
- 制器从左到右输出一行像素数据;
- 每个 PCLK 周期传输一个像素;
- 行结束时发出 HSYNC 脉冲,准备下一行。
| 参数 | 含义 | 值 |
|---|---|---|
HSPW |
水平同步脉宽 | 40 |
HBP |
水平后沿 | 88 |
HFP |
水平前沿 | 48 |
| 总行周期 | HBP + 800 + HFP + HSPW |
976 像素 |
2.场扫描
工作原理:
在完成全部 480 行后,发出 VSYNC 脉冲,标志一帧结束;
控制帧与帧之间的切换,决定刷新率(如 60Hz)。
| 参数 | 含义 | 值 |
|---|---|---|
VSPW |
垂直同步脉宽 | 3 |
VBP |
垂直后沿 | 32 |
VFP |
垂直前沿 | 13 |
| 总场周期 | VBP + 480 + VFP + VSPW |
528 行 |
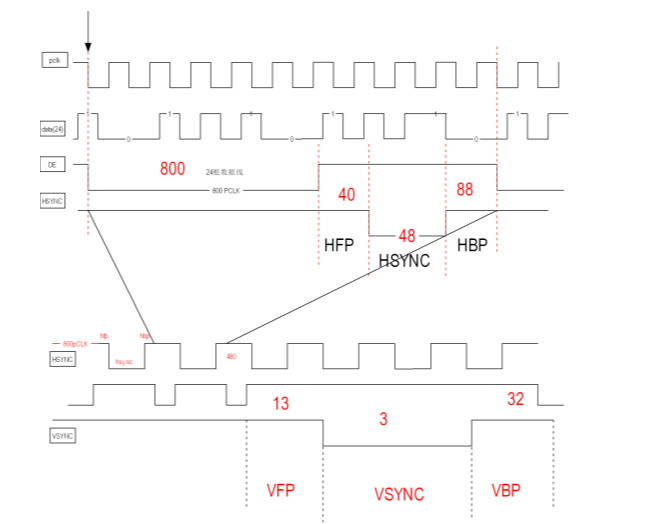 行场时序图
行场时序图
五、LCD代码实现
1. 引脚配置(lcd_pad_init())
将 GPIO 复用为 eLCDIF 功能,配置 24 根 RGB 数据线及 HSYNC/VSYNC/DE/PCLK 控制信号。
设置背光控制引脚为输出高电平,并配置高速电气特性(如驱动强度和压摆率)。
cs
void lcd_pad_init(void)
{
//复用功能
IOMUXC_SetPinMux(IOMUXC_LCD_DATA00_LCDIF_DATA00, 0);
...
IOMUXC_SetPinMux(IOMUXC_LCD_CLK_LCDIF_CLK, 0);
IOMUXC_SetPinMux(IOMUXC_LCD_HSYNC_LCDIF_HSYNC, 0);
IOMUXC_SetPinMux(IOMUXC_LCD_VSYNC_LCDIF_VSYNC, 0);
IOMUXC_SetPinMux(IOMUXC_LCD_ENABLE_LCDIF_ENABLE, 0);
IOMUXC_SetPinMux(IOMUXC_GPIO1_IO08_GPIO1_IO08, 0);
//电气特性
IOMUXC_SetPinConfig(IOMUXC_LCD_DATA00_LCDIF_DATA00, 0xB9);
...
IOMUXC_SetPinConfig(IOMUXC_LCD_CLK_LCDIF_CLK, 0xB9);
IOMUXC_SetPinConfig(IOMUXC_LCD_HSYNC_LCDIF_HSYNC, 0xB9);
IOMUXC_SetPinConfig(IOMUXC_LCD_VSYNC_LCDIF_VSYNC, 0xB9);
IOMUXC_SetPinConfig(IOMUXC_LCD_ENABLE_LCDIF_ENABLE, 0xB9);
IOMUXC_SetPinConfig(IOMUXC_GPIO1_IO08_GPIO1_IO08, 0xB9);
//将背光引脚输出高电平
GPIO1->GDIR |= (1 << 8);
GPIO1->DR |= (1 << 8);
}2.时钟配置(lcd_clk_init())
启用 PLL5(VIDEO PLL)作为 LCD 像素时钟源,并通过分频器生成目标 PCLK(如 ~33 MHz)。
配置时钟选择寄存器,将 LCDIF 时钟路径切换至 PLL5 输出。
cs
void lcd_clk_init(void)
{
//1. PLL5 output frequency = Fref(24M) * (DIV_SELECT(D(31)) + NUM(0)/DENOM(1))
CCM_ANALOG->PLL_VIDEO_NUM = 0;
CCM_ANALOG->PLL_VIDEO_DENOM = 1;
unsigned int t = CCM_ANALOG->PLL_VIDEO;
t &= ~(3 << 19);
t |= (2 << 19);
t &= ~(0x7F << 0);
t |= (31 << 0);
CCM_ANALOG->PLL_VIDEO = t;
CCM_ANALOG->PLL_VIDEO |= (1 << 13); //使能PLL5
CCM_ANALOG->MISC2 &= ~(3 << 30); //CCM_ANALOG_MISC2n[VIDEO_DIV]
t = CCM->CSCDR2;
//t &= ~(7 << 15);
t |= (2 << 15); //CSCDR2[LCDIF1_PRE_CLK_SEL]
t &= ~(7 << 12);
t |= (3 << 12); //CSCDR2[LCDIF1_PRED
t &= ~(7 << 9); //CSCDR2[LCDIF1_CLK_SEL]
CCM->CSCDR2 = t;
CCM->CBCMR &= ~(7 << 23); //CBCMR[LCDIF1_PODF]
CCM->CBCMR |= (5 << 23);
}3. LCD 控制器配置(lcd_init())
填充分辨率与时序参数(HSPW/HBP/HFP/VSPW/VBP/VFP),并写入 eLCDIF 寄存器。
设置帧缓冲地址(CUR_BUF/NEXT_BUF),启用控制器并启动显示输出。
cs
void lcd_init(void)
{
//IOMUXC
lcd_pad_init();
//模块复位
reset_lcd();
//clock PLL5 ->31M
lcd_clk_init();
delay_ms(50);
lcd_dev.width = 800;
lcd_dev.height = 480;
lcd_dev.pix_size = 4;
lcd_dev.hspw = 48;
lcd_dev.hbp = 88;
lcd_dev.hfp = 40;
lcd_dev.vspw = 3;
lcd_dev.vbp = 32;
lcd_dev.vfp = 13;
lcd_dev.frame_addr = _FRAME_RAM_ADDRESS;
lcd_dev.fore_color = 0x00FF0000;
lcd_dev.back_color = 0xFFFFFFFF;
LCDIF->CTRL |= (1 << 19) | (1 << 17) | (3 << 10) | (3 << 8) | (1 << 5);
LCDIF->CTRL1 &= ~(0xF << 16);
LCDIF->CTRL1 |= (0x7 << 16);
LCDIF->TRANSFER_COUNT = (lcd_dev.height << 16) | (lcd_dev.width << 0);
LCDIF->CUR_BUF = lcd_dev.frame_addr;
LCDIF->NEXT_BUF = lcd_dev.frame_addr;
LCDIF->VDCTRL0 = (1 << 28) | (1 << 24) | (1 << 21) | (1 << 20) | (lcd_dev.vspw << 0);
LCDIF->VDCTRL1 = lcd_dev.height + lcd_dev.vspw + lcd_dev.vbp + lcd_dev.vfp;
LCDIF->VDCTRL2 = (lcd_dev.hspw << 18) | (lcd_dev.width + lcd_dev.hspw + lcd_dev.hbp + lcd_dev.hfp);
LCDIF->VDCTRL3 = ((lcd_dev.hspw + lcd_dev.hbp) << 16) | ((lcd_dev.vspw + lcd_dev.vbp) << 0);
LCDIF->VDCTRL4 = (1 << 18) | (lcd_dev.width << 0);
LCDIF->CTRL |= (1 << 0); //run
delay_ms(50);
screen_clear(0xFFFFFFFF);
}