通讯作者:Yashwanth Ramesh
DOI:https://doi.org/10.1038/s41467-025-67889-w
摘要
监测大面积农业区域的地下土壤状况对于优化资源利用和支持可持续作物生产至关重要。然而,大多数现有传感系统依赖电池供电的电子设备,成本高昂、需要维护且难以规模化部署。为解决这些局限性,我们提出了 HARVEST(Hybrid Antenna for Radio frequency-enhanced Volumetric water content and Electrical conductivity-based Soil Tracking,基于射频增强的体积含水量和电导率土壤跟踪混合天线系统)------ 一种低成本无线平台,无需机载电子设备。HARVEST 采用钉状传感探头,与地面上方的三环天线进行物理和电气耦合,在减少信号损耗的同时,保持对地下土壤变化的敏感性。土壤含水量和盐度的变化会改变埋地探头的电气特性,导致天线谐振响应偏移,该偏移可通过空中读取器进行无线检测。该系统通过电磁仿真进行优化,并通过实验室实验和全生育期田间部署验证有效性。HARVEST 能够通过无人机在高达 1.8 米的高度进行读取,实现对地下土壤含水量和电导率的可靠检测。该平台为地下土壤实时监测提供了可扩展、免维护的解决方案,推动了下一代精准农业技术的发展。通过在大面积农田中部署分布式、低成本传感器,HARVEST 能够深入获取地下土壤状况的时空信息,支持数据驱动的农业管理,同时减少环境影响。
引言
在过去六十年中,全球农业取得了显著进步,谷物产量(主要是玉米、水稻和小麦)几乎增长了三倍,而耕地面积仅适度增加了 37%。这一增长满足了快速增长的人口需求,使全球平均谷物产量从 1961 年的 1.6 吨 / 公顷提升至 2020 年的 4.7 吨 / 公顷 ²。然而,预计到 2050 年全球人口将达到 97 亿,粮食产量需增加约 70% 才能满足需求 ³。传统农业实践越来越难以满足需求,且已导致广泛的土地和水资源退化,影响了近 38% 的耕地⁴。这一趋势凸显了对资源高效和生态可持续农业策略的迫切需求⁵⁻⁶。
实现可持续集约化农业的核心挑战在于土壤特性(如 pH 值、含水量和养分分布)的高时空变异性,这显著影响了投入效率⁷。例如,将土壤含水量分辨率从 30 米提升至 1000 米可能导致高达 80% 的空间变异性丢失,进而造成严重的灌溉低效⁸⁻⁹。同样,在 6-18 米范围内,局部土壤 pH 值变化超过 2 个单位可能会误导石灰和肥料的施用,最终降低作物产量。克服这些局限性需要高分辨率的土壤监测,以支持靶向资源投放并最大限度减少环境浪费 ¹⁰。
精准农业通过整合传感技术、数据分析和自动化技术来优化投入施用,从而应对这些挑战 ¹¹。无人机(UAV)、遥感平台、高光谱成像和田间无线物联网传感器等工具已实现了.site-specific 管理策略 ¹²⁻¹⁷。研究表明,与传统方法相比,仅传感器辅助灌溉就能减少 40% 以上的用水量 ¹⁸。然而,大多数商业系统仍依赖电池供电的电子设备和昂贵的无线模块,由于成本高、功耗需求大且需要维护,限制了其大规模部署 ¹⁹。原位土壤传感器在监测关键地下参数(如体积含水量(VWC)和电导率(EC)------ 含水量、盐度和养分有效性的关键指标)方面具有特别大的潜力 ²⁰⁻²⁴。然而,诸如 Decagon 5TE® 和 Sentek Drill & Drop® 等商用产品由于依赖有源电路且空间覆盖有限,仍然成本高昂且难以规模化部署 ²⁵⁻²⁶。因此,许多农田的传感器部署稀疏,导致数据质量下降,影响精准决策 ²⁷。
为填补这一空白,我们团队此前提出了一种无源、无芯片射频反向散射传感器,由短路偶极子和曲折线谐振器组成,完全埋在土壤表面下以监测体积含水量。尽管该方法显示出潜力,但地下部署导致了显著的射频衰减,需要近距离探测(<40 厘米)和严格的角度对准 ------ 这些因素限制了其在无人机读取或规模化部署中的实用性 ²⁸⁻²⁹。
尽管已有部分研究尝试通过将传感元件与射频天线解耦来克服这一挑战,但许多解决方案仍采用传统的基于 RFID 的架构 ³⁰。这些系统通常包含用于信号处理和识别的电子芯片,并搭配延伸至传感介质(如土壤或混凝土)之外的天线,以增强无线通信 ³¹。此类设计虽提高了读取距离,但通常需要多步骤制造(包括焊接和芯片集成),且材料和组装成本更高 ------ 最终限制了其在大范围田间部署的可行性 ³²。
在本研究中,我们提出了 HARVEST------ 一种无源、无芯片射频反向散射平台,用于地下土壤健康监测,该平台结合了解耦的传感 - 天线架构和简化的无芯片设计。通过省去集成电子设备并最大限度降低组装复杂度,HARVEST 实现了低成本制造、可靠的无人机探测,以及无需电池和维护的广域部署。该系统整合了嵌入土壤中的钉状传感探头(用于体积含水量和电导率监测),每个探头均与地面上方的三重开口环谐振器(SRR)split-ring resonator (SRR)天线电气耦合 ³³。这种混合配置最大限度地减少了土壤引起的射频损耗,同时保持了对地下土壤的敏感性。
我们将 HARVEST 的圆形开口环谐振器设计为适用于低超高频(UHF)工作模式且具有旋转对称性,当无人机载读取器直接悬停在传感器上方时,能够实现与方向无关(偏航不敏感)的通信 ³⁴⁻³⁷。钉状传感探头便于插入土壤并确保传感器与土壤的稳定接触,而高架开口环谐振器天线则保证了可靠的信号传输。我们通过全波电磁仿真优化了该系统,并在实验室和田间环境中验证了其性能。在印第安纳州玉米田进行的全生育期田间部署表明,HARVEST 能够以 2 米的空间间隔可靠监测地下土壤体积含水量和电导率,且无人机可在高达 1.8 米的高度成功进行探测。这些结果表明,将低成本射频元件与专用传感接口相结合,为地下土壤监测提供了一种可扩展、免维护的方法,在支持数据驱动的精准农业方面具有巨大潜力。
结果
工作原理
HARVEST 平台整合了两个核心组件:嵌入土壤中的钉状传感探头(用于监测地下土壤体积含水量和电导率),以及位于地面上方的圆形三重开口环谐振器天线(用于实现无源无线数据通信)(图 1a)。每个探头均采用印刷电路板(PCB)制造,包含两个针对特定传感功能设计的平行电极。
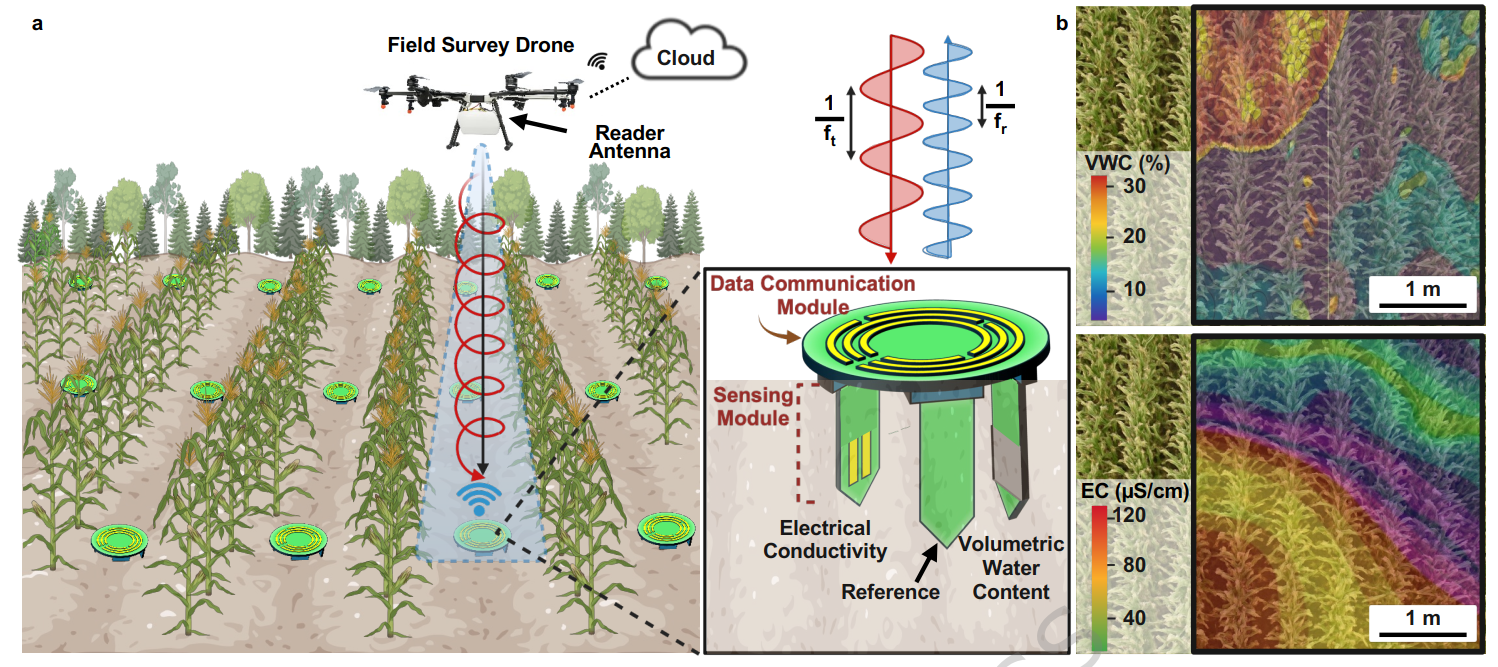
Fig. 1 | HARVEST 无线地下土壤监测集成平台. a) 无人机辅助射频探测 HARVEST 传感器在农田中分布式部署的示意图。HARVEST 传感器放大图显示其两个核心组件:传感模块(包含嵌入土壤的钉状探头,用于测量体积含水量(VWC)和电导率(EC))和数据通信模块(含圆形三重开口环谐振器(SRR)天线,用于远场无线传输)。b) HARVEST 系统无线监测土壤参数变化并实现田间地下土壤 VWC 和 EC 空间绘图的示意图。使用 BioRender 制作。
电导率探头的下部未钝化,与土壤直接接触。这种配置允许探头与土壤中的离子相互作用,离子电导率的变化会调节表面行波的耗散,进而导致电极间的有效并联电阻发生偏移。相比之下,体积含水量探头完全钝化,避免了直接的离子接触,使周围土壤的介电特性能够影响电极间的电容。这一设计实现了将含水量相关的介电变化可靠转换为可测量的电响应。系统中还集成了第三个无电极参考探头,用作机械稳定器并为信号参考提供环境基线。
三个探头分别通过印刷电路板卡缘连接器与对应的开口环谐振器电气连接:最大的开口环谐振器连接电导率探头,中间的连接体积含水量探头,最小的连接参考探头。地下土壤环境的变化会导致开口环谐振器天线的反射系数谱(S₁₁)偏移,通过分析该偏移可提取体积含水量和电导率值。
对于体积含水量监测,土壤含水量的变化会改变探头周围的有效介电常数,进而调节开口环谐振器电路的电容 C。这导致谐振频率偏移,遵循以下公式: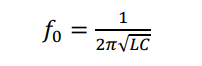
其中,L 为电感,C 为体积含水量 - 开口环谐振器系统的有效电容。随着土壤含水量增加,C 增大,导致谐振频率降低。
对于电导率监测,离子电导率的变化会影响有效并联电阻 Rₑff,进而调节谐振品质因数 Q,其计算公式为: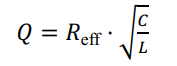
电导率越高,Rₑff 越小,品质因数越低,导致 S₁₁谱中的谐振峰更宽、更平缓。为减轻无人机高度、天线对准偏差和土壤异质性等环境和几何因素引起的信号变异性,HARVEST 采用了比率参考策略:体积含水量通过计算体积含水量开口环谐振器与参考开口环谐振器之间的频率差提取,而电导率则通过电导率开口环谐振器与参考开口环谐振器之间的振幅比确定。该参考方案确保了在实际部署条件下传感的稳健性和可解释性。
无线探测由无人机载射频读取器完成,该读取器包括双极化宽带天线(半功率波束宽度≈35°)、纳米矢量网络分析仪(NanoVNA)和机载微控制器单元(MCU)。工作时,无人机悬停在每个传感器上方,通过纳米矢量网络分析仪启动频率扫描。传感器的 S₁₁响应呈现三个不同的谐振峰,分别对应三个开口环谐振器:第一个峰通过振幅反映电导率监测结果,第二个峰通过频率偏移捕捉体积含水量监测结果,第三个峰提供稳定参考。
为抑制环境射频噪声和多径效应,无人机系统首先在附近无传感器区域采集背景谱(S₁₁^ 背景),并从传感器上方记录的谱(S₁₁^ 传感器)中减去该背景谱,得到校准信号:
随后,使用 Savitzky-Golay 滤波器对所得谱进行平滑处理,在减少噪声的同时保留峰特征,提高信号保真度。所有信号处理均在无人机上实时进行:微控制器单元提取相关谐振特征,并利用实验室表征获得的校准曲线将其转换为体积含水量和电导率值。传感器的位置和时间戳被附加到数据中,然后通过机载 Wi-Fi 模块无线上传至安全的云服务器(图 1b)。这种完全自主的实时工作流程支持对大面积农业区域的地下土壤健康进行可扩展、免维护的监测,无需人工数据采集或后处理。
为评估 HARVEST 平台在无线、无电子设备地下土壤监测中的实际应用效果,我们从五个关键性能领域对系统进行了系统设计和评估:首先,优化三重开口环谐振器天线架构,建立对应于各个传感通道的三个不同频段,确保在不同读取角度和环境条件下最小的频谱串扰和稳定的无线性能;其次,表征钉状传感探头与其对应的开口环谐振器之间的耦合关系,评估其对地下土壤体积含水量和电导率变化的敏感性、稳定性和可重复性;第三,通过改变相邻传感器的位置和方向,研究系统的读取范围和空间交叉敏感性,评估不同部署几何结构下的稳健性;第四,HARVEST集成了内置自校准和噪声消除策略 ------ 利用专用参考开口环谐振器和环境背景减法 ------ 并在实验室和田间条件下进行了验证,以确保在无人机高度、天线方向和环境射频噪声等实际变化下的稳定信号质量;最后,在活跃玉米田部署完整的 HARVEST 系统,并在整个作物生长周期内运行,以验证其长期田间性能和农艺相关性。通过这五个领域的表征,我们严格验证了 HARVEST 平台的有效性,证明其是精准农业中无线地下土壤传感的稳健、可扩展且免维护的解决方案。
天线设计
HARVEST 平台的无线通信接口旨在将土壤参数编码到无源、无电池天线系统的频谱响应中。当通过射频读取器远程探测时,地下土壤条件(如体积含水量和电导率)的变化会改变天线周围的介电环境,导致其谐振频率和振幅发生可测量的偏移。这些变化通过天线的 S₁₁参数捕获,实现无需机载电源或电路的完全无源、无电子设备传感。
为实现多参数监测,天线设计包含三个不同的谐振器:两个用于地下土壤体积含水量和电导率监测,一个用作内部校准和环境噪声补偿的参考。确保这些谐振峰之间足够的频谱分离对于避免重叠和实现准确的信号解码至关重要。因此,天线系统的工作带宽设定在 600-1200 MHz 之间,目标峰间分离为 150-200 MHz。该范围是根据应用特定约束和物理设计考虑选择的:915 MHz 中心频率属于全球公认的工业、科学和医疗(ISM)频段,支持物联网、RFID 和农业监测等无执照低功率遥测应用。在该频段工作能够在天线紧凑性和信号传播性能之间取得平衡,尤其是在茂密植被环境中。
天线设计还优先考虑角度独立性,以适应无人机探测几何结构的变异性。使用线性偶极子谐振器的初步评估显示出显著的角度敏感性:偶极子在方位平面旋转 90° 会导致所有测试长度(3.5-6.0 厘米)的谐振振幅大幅降低,证实偶极子几何结构不适用于无人机兼容传感(图 2a、b)。
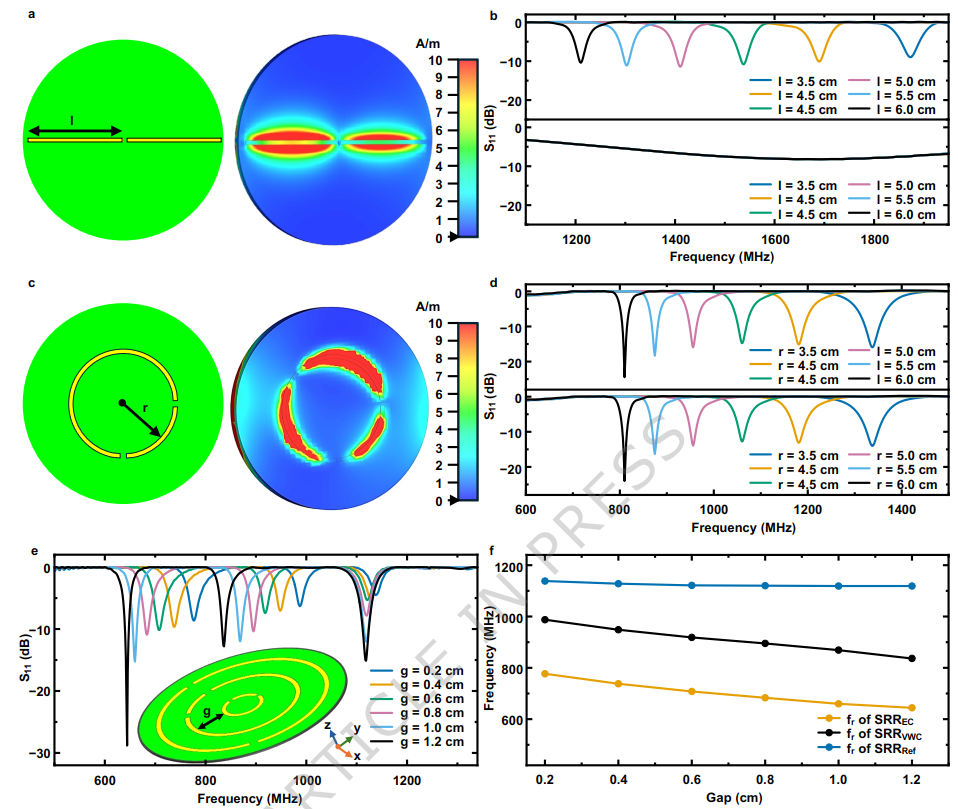
Fig. 2 | 天线仿真与开口环谐振器(SRR)设计优化. a) 圆形基板上的偶极子天线及其模拟磁场(H 场)分布。b) 不同长度(l=3.5 厘米至 6 厘米)的偶极子天线在 90° 旋转前后的模拟反射系数(|S₁₁|)。c) 圆形基板上的单个开口环谐振器(SRR)及其对应的 H 场分布。d) 不同半径(r=3.5 厘米至 6 厘米)的单个开口环谐振器在 90° 旋转前后的模拟 S₁₁谱。e) 三重开口环谐振器配置及不同谐振器间隙距离(g)下记录的 S₁₁谱(插图为间隙示意图)。f) 每个开口环谐振器的谐振频率随间隙距离(g=0.2 厘米至 1.2 厘米)的偏移。图 2 的原始数据见原始数据文件。(a、c:图片经 ANSYS, Inc. 授权使用)
为克服这一限制,我们开发了圆形双缝开口环谐振器配置,具有更强的磁场耦合和旋转不敏感性。对开口环谐振器半径(3.5-6.0 厘米)的参数化仿真显示,谐振频率可预测地从 1375 MHz 偏移至 800 MHz,且在 90° 旋转下偏差仅为 ±21 MHz,满足田间部署的可接受公差(图 2c、d)。
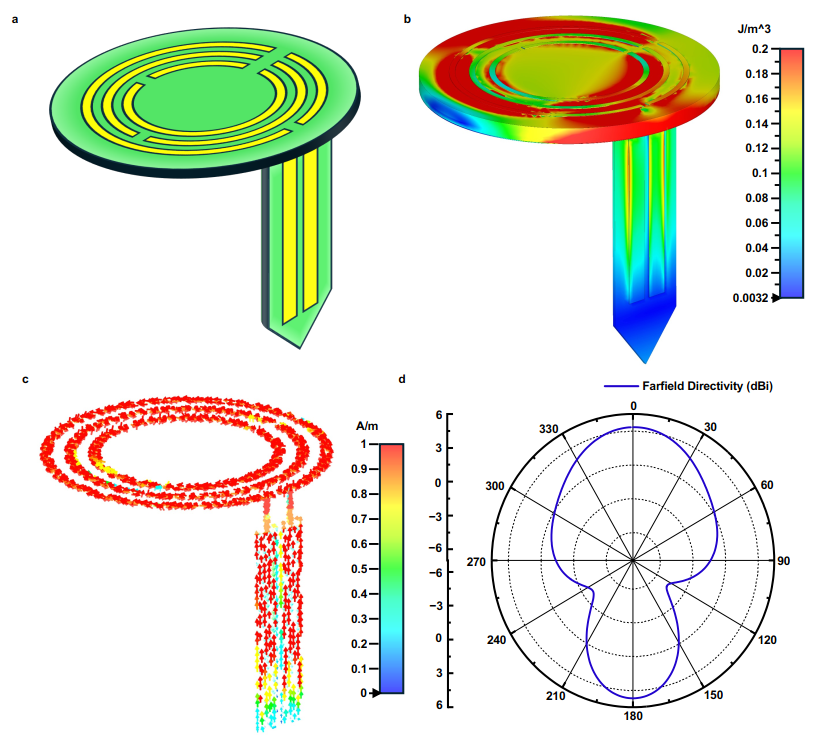
基于这些结果,我们设计了一种由三个不同半径的同心开口环谐振器组成的复合天线结构,能够在指定的 600-1200 MHz 频段内同时检测电导率、体积含水量和稳定参考信号。这种多谐振三重开口环谐振器天线在谐振器之间具有强隔离性、最小的频谱串扰,并且当读取器对准传感器上方时,在不同读取器旋转角度下具有稳健的反向散射性能。最大的开口环谐振器连接电导率探头,中间的连接体积含水量探头,最小的连接参考探头。为确保即使在茂密玉米冠层(高达 1.8 米)下也能实现远距离通信,天线设计具有高方向性。最终天线组件的感应表面磁场、电流分布和定向辐射图如图补充材料图 1 所示。无人机载探测仪的工作功率约为 10 dBm,远低于美国联邦通信委员会(FCC)规定的 30 dBm 限值,确保安全、低干扰运行。
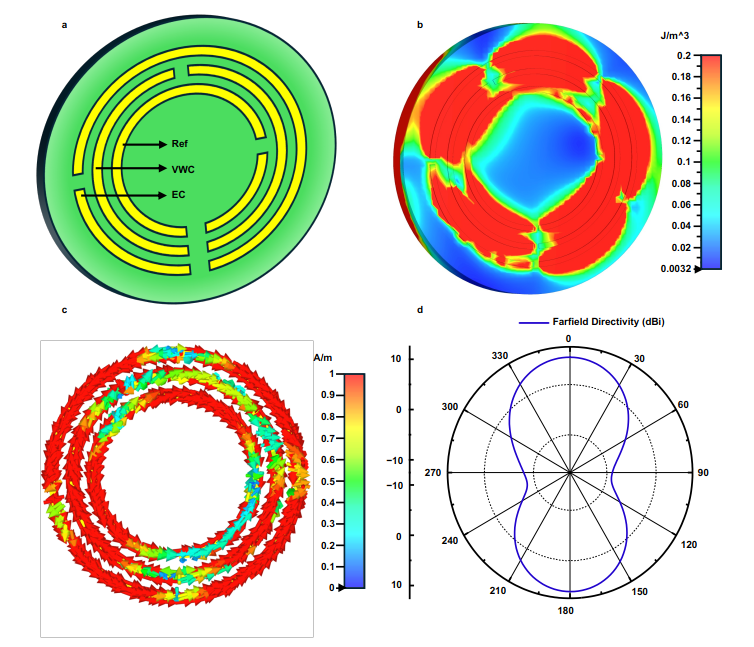
Supplementary Fig. 1| 三重开口环谐振器(SRR)天线的电磁仿真
a) HARVEST 系统中使用的三重开口环谐振器(SRR)天线配置示意图。b) 谐振器结构上的模拟表面磁场分布,突出磁场约束特性和谐振器之间的相互作用。c) 天线上的表面电流分布,展示电流流向及谐振器间的耦合行为。d) 三重开口环谐振器天线的二维辐射方向图。Supplementary Fig. 1 的原始数据见原始数据文件。(b、c:图片经 ANSYS, Inc. 授权使用)
为确定三重开口环谐振器天线的最佳配置,我们进行了系统的参数分析:首先选择半径为 4 厘米的开口环谐振器作为基准参考谐振器,其主谐振频率为 1150 MHz;随后,将相邻开口环谐振器之间的间距从 0.2 厘米变化至 1.2 厘米,评估其对谐振行为的影响,并确定其余两个开口环谐振器的理想半径(图 2e)。仿真结果表明,增加谐振器间间距会出现三个不同的谐振峰:尽管第三个峰(对应参考开口环谐振器)基本不受影响,但第一个和第二个峰的谐振频率随间距增加呈现约 10% 的偏移(图 2e)。值得注意的是,所有三个峰的 | S₁₁| 值随间距增大而显著增加,表明谐振器之间的电磁耦合减少,串扰最小化。图 2e 中观察到的趋势总结于图 2f,描述了三个开口环谐振器的谐振频率随间距的变化:在最小间距 0.2 厘米时,谐振频率约为 1120 MHz、950 MHz 和 790 MHz;随着间距增加,这些频率逐渐分离,尤其是两个较大的开口环谐振器;最小的开口环谐振器(最低频率)在间距超过 0.8 厘米后频率稳定,性能一致。在间距为 0.8 厘米时,谐振峰之间的分离达到理想配置:第一个和第二个峰分离 200 MHz,第二个和第三个峰分离 168 MHz,均在目标工作带宽 600-1200 MHz 内。该配置在确保准确传感所需的足够频谱隔离的同时,保持了紧凑的天线尺寸。基于这些结果,选择开口环谐振器之间的间距为 0.8 厘米作为最佳设计,以实现稳健、多谐振的无线传感,且干扰最小。
天线 - 传感器集成与敏感性性能评估
首先,通过系统仿真分析钉状传感探头设计,优化电极配置以最大化对周围土壤介电变化的敏感性。随后,对电极宽度和间隙进行参数扫描,研究其对电场分布和所得阻抗响应的影响。在从干燥到湿润的不同土壤条件下的仿真表明,宽度为 10 毫米、间隙为 8 毫米的电极始终观察到最大的电阻抗相对变化,因此该几何结构被确定为最有效地高灵敏度捕捉土壤含水量动态的设计(补充材料图 2)。
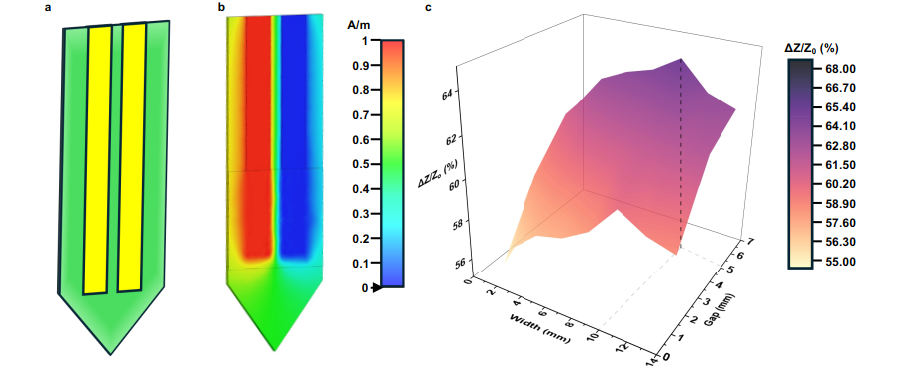
Supplementary Fig. 2 | 钉状传感探头结构及阻抗敏感性分析
a) HARVEST 系统中使用的钉状传感探头示意图。b) 探头电极上的模拟表面电流分布,展示土壤介电加载下的电流路径。c) 不同电极设计在干燥和湿润土壤条件下的模拟电阻抗变化,突出电极宽度和电极间距的影响。当电极宽度为 10 毫米、间距为 8 毫米时,阻抗响应灵敏度达到峰值 64%,该结构被确定为体积含水量(VWC)传感的最优配置。Supplementary Fig. 2 的原始数据见原始数据文件。(b:图片经 ANSYS, Inc. 授权使用)
接下来,为评估集成混合探头 - 天线传感器的性能,我们系统分析了将钉状探头连接到三重开口环谐振器天线的效果(图 3a):将无电极参考探头连接到最小谐振器对谐振谱没有可测量的影响;将体积含水量探头连接到中间开口环谐振器导致其谐振频率降低约 3%,而其他两个峰保持不变;将电导率探头耦合到最大开口环谐振器导致对应峰的谐振频率偏移约 1%。图 3b 总结的这些结果证实,每个探头 - 谐振器对独立工作,串扰或频谱干扰可忽略不计。补充材料图 3 展示了探头连接到三重开口环谐振器天线后表面磁场、电流分布和辐射方向性的变化。从等效电路角度来看,传感器连接时观察到的频率偏移可归因于钉状探头引入的有效电容增加 ------ 正如谐振 LC 系统所预期的那样,这会略微降低对应开口环谐振器的固有谐振频率。
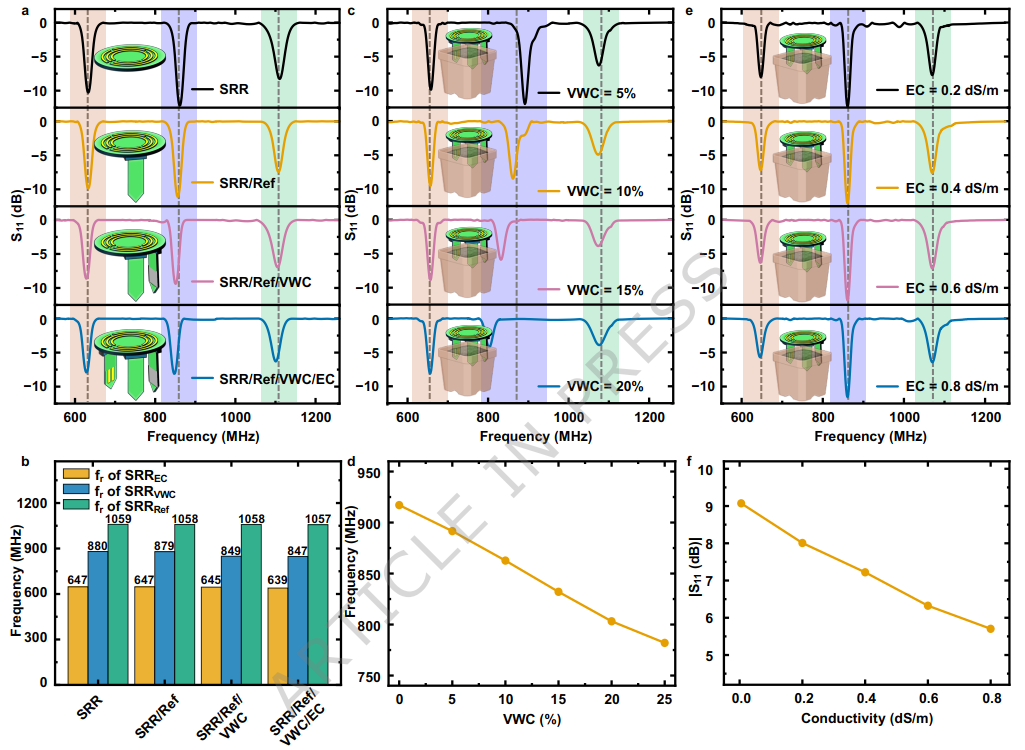
Fig. 3 | HARVEST 对土壤 VWC 和 EC 变化敏感性的仿真表征
a) 参考、VWC 和 EC 钉状探头依次连接到天线指定开口环谐振器时,S₁₁谱的变化。b) 参考、VWC 和 EC 监测探头依次集成后,每个开口环谐振器的记录谐振频率。c) HARVEST 嵌入土壤后,VWC 从 5% 逐步增加至 20% 时的 S₁₁谱变化(插图 a-c:展示传感器探头连接、放置及土壤干湿条件的不同阶段)。d) VWC 相关开口环谐振器(中间峰,SRR_VWC)的频率偏移随 VWC 变化的校准曲线。e) HARVEST 置于土壤中,EC 从 0.2 变化至 0.8 dS/m 时的 S₁₁谱变化。f) EC 相关开口环谐振器(第一个峰,SRR_EC)的振幅变化随 EC 变化的校准曲线。(谱图中彩色谐振峰:橙色:EC 谐振器(SRR_EC),蓝色:VWC 谐振器(SRR_VWC),绿色:参考谐振器(SRR_Ref))。图 3 的原始数据见原始数据文件。花盆图标:使用 BioRender 制作。Rahimi, R. (2025)
Supplementary Fig. 3 | 三重开口环谐振器天线与钉状传感探头的集成仿真
a) 三重开口环谐振器天线与钉状传感探头的集成示意图。b) 谐振器及钉状传感探头上的模拟表面磁场分布,突出磁场约束特性和能量转换路径。c) 激励状态下天线 - 探头组件的表面电流分布,展示电流流向。d) 连接钉状传感探头后的三重开口环谐振器天线二维辐射方向图。
为进一步表征 HARVEST 对土壤条件的传感响应,我们使用壤土模型进行仿真,评估其对体积含水量和电导率变化的敏感性。体积含水量探头需要电气钝化,以实现电容耦合,同时防止电极与土壤之间的离子传导。该钝化层不仅对于电气隔离至关重要,而且对于使用标准印刷电路板兼容技术确保敏感性和可制造性也至关重要。
为确定最佳介电涂层,我们对探头活性区域施加了 10 微米至 100 微米的涂层厚度进行仿真:较薄涂层(10-30 微米)由于电极与周围土壤之间的边缘场耦合增强而提供更高的敏感性,但此类涂层存在制造挑战,如均匀性差、针孔和介电失效风险更高;相反,较厚涂层(如 100 微米)提供可靠的绝缘和更好的 S₁₁性能,但由于电场穿透有限,对土壤体积含水量的敏感性降低。研究发现,50 微米厚的钝化层实现了最佳平衡 ------ 对土壤介电特性变化具有高敏感性、稳健的电气绝缘,且可通过刮刀涂布印刷电路板阻焊剂等可扩展的增材技术实际制造。这种优化涂层随后应用于体积含水量探头的制造,并通过仿真和实验测试进行了验证(见补充材料说明 1 和补充材料图 4)。
补充说明 1:提升体积含水量(VWC)敏感性的钝化层厚度优化
为系统评估钝化层对地下土壤体积含水量变化敏感性的影响,我们开展了参数化电磁仿真研究,并对不同钝化层厚度进行了详细的表面轮廓测量。仿真模型包含嵌入土壤介质中的体积含水量钉状传感探头,具体设置如下:通过为周围土壤区域分配相应的复介电常数,将土壤体积含水量从 0% 以 5% 为增量变化至 25%。针对每个体积含水量水平,对探头表面的介电涂层厚度进行参数化扫描。
提取每种配置的 S₁₁谱,并记录相关开口环谐振器的谐振频率偏移。结果表明,增加涂层厚度会降低电容耦合效率,进而降低敏感性;而较薄涂层虽敏感性更高,但会导致谐振峰振幅显著减小(补充图 4a、b)。此外,通过对体积含水量探头不同钝化层厚度的轮廓测量,确定了能形成均匀且坚固表面钝化层的最小厚度:较薄涂层会导致表面不均匀(包括边缘不规则和潜在针孔形成),可能降低信号稳定性和长期可靠性;相反,较厚涂层能形成更平滑、均匀的表面(补充图 4c (i)-(iv)、4d (i)-(iv))。基于这些发现,50 微米厚的钝化层被认为在转换性能和涂层均匀性之间达到了最佳平衡 ------ 既能对体积含水量保持稳健的敏感性,又能维持连续无缺陷的介电表面。因此,最终设计中体积含水量探头的钝化层厚度选定为 50 微米,以确保有效的电磁转换。
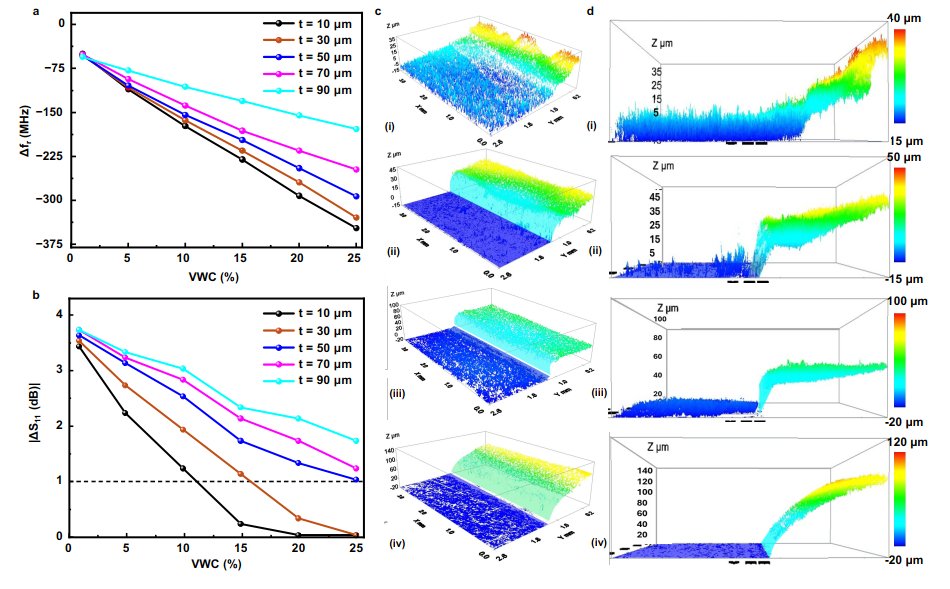
Supplementary Fig. 4 | 体积含水量(VWC)钉状传感探头的钝化层厚度优化
a) 不同体积含水量和钝化层厚度下,体积含水量谐振器(SRR_VWC)相对于参考谐振器(SRR_Ref)的差分谐振频率偏移仿真曲线。b) 不同体积含水量和钝化层厚度下,SRR_VWC 谐振峰振幅相对于 SRR_Ref 的仿真变化曲线。实验表面轮廓测量结果:c) 三维视图;d) 侧视图,展示体积含水量探头不同钝化层厚度:(i) 30 微米,(ii) 50 微米,(iii) 70 微米,(iv) 120 微米。Supplementary Fig. 4 的原始数据见原始数据文件。
通过仿真不同土壤条件下反向散射信号 S₁₁的频谱特性(频率和强度)变化,分析了 HARVEST 传感器嵌入土壤后的效果:当传感器放置在土壤模型中(钉状探头埋入地下,三重开口环谐振器天线位于地面上方)时,接收信号的 | S₁₁| 值降低约 1 dB,这归因于土壤介质中的介电损耗,略微降低了谐振器响应的品质因数(Q 因子)。
为评估对体积含水量的敏感性,我们在保持电导率恒定的情况下,将土壤体积含水量从 0% 以 5% 的增量增加至 25% 进行仿真。结果显示,与体积含水量传感探头相关的中间谐振峰,每增加 5% 的土壤体积含水量,谐振频率下移 5.7%,|S₁₁| 振幅降低约 45%(图 3c、d)。相比之下,对应电导率和参考谐振器的其他两个峰保持稳定,频率偏移极小(±6 MHz),振幅变化可忽略不计。
为评估对土壤电导率的敏感性,我们进行了另一组仿真:保持体积含水量恒定在 5%,将电导率以 0.2 dS/m 的步长从 0.01 变化至 0.8 dS/m。结果表明,与电导率传感器相关的第一个谐振峰,每增加一个电导率增量,|S₁₁| 值降低约 33%,而其谐振频率基本保持不变(±2 MHz)。同样,体积含水量和参考谐振峰在电导率调制下的频率和振幅变化极小(图 3e、f)。
这些结果证实,HARVEST 的多谐振器设计能够实现对体积含水量和电导率的选择性和独立监测。该平台表现出的线性敏感性约为:体积含水量每变化 1%,频率偏移 7.32 MHz(通过中间开口环谐振器的频率偏移捕获);电导率每变化 1 dS/m,振幅变化 4.32 dB(通过第一个开口环谐振器的振幅变化捕获)。重要的是,参考谐振器在所有环境变化中始终保持其谐振频率和振幅,验证了其作为信号归一化和漂移校正的稳定原位校准标准的作用。这确保了 HARVEST 在可变田间条件下的稳健性和可靠性,并凸显了三重谐振器配置在多参数地下土壤监测中的价值。
读取范围和空间交叉敏感性
为评估 HARVEST 平台使用便携式无人机载探测系统的实际读取范围和田间部署可行性,我们进行了仿真和实验室控制实验。这些研究采用了两种天线:标准高增益喇叭读取器天线(HRA)和定制开发的便携式读取器天线(PRA)。在两种设置中,将包含三重开口环谐振器天线和钉状传感探头连接的 HARVEST 平台放置在土壤模型内,并捕获和分析反射的 S₁₁频谱信号。
首先进行仿真,将读取器天线与 HARVEST 传感器之间的距离从 60 厘米以 30 厘米的增量变化至 180 厘米。选择 60 厘米的下限是为了超过三重开口环谐振器天线的 58 厘米远场极限,确保有意义的远场分析。土壤模型的体积含水量保持恒定在 5%。如图 4a 所示,三个开口环谐振器的谐振频率位置在所有距离下均保持稳定。然而,随着距离增加,峰振幅逐渐降低,这与自由空间路径损耗和耦合效率降低的预期一致。
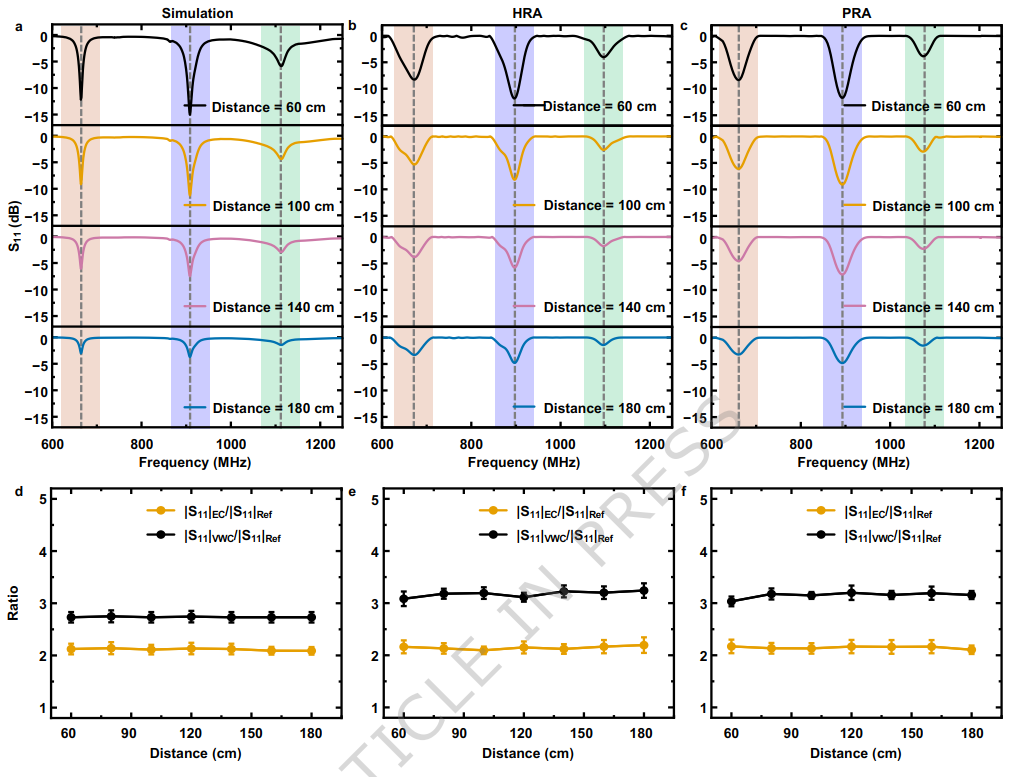 Fig. 4 | HARVEST 系统的读取范围表征
Fig. 4 | HARVEST 系统的读取范围表征
使用三种不同射频探测仪配置,测量 HARVEST 传感器与读取器之间距离变化时记录的 S₁₁谱变化:a) 波导端口模拟激励。b) 外部喇叭参考天线(HRA)实验测试。c) 便携式读取器天线(PRA)实验测试。在不同射频探测仪距离下,VWC 谐振器(|SRR_VWC|)和 EC 谐振器(|SRR_EC|)与参考谐振器(|SRR_Ref|)的振幅比:d) 波导端口仿真,e) 基于 HRA 的实验探测,f) 基于 PRA 的实验探测。(谱图中彩色谐振峰:橙色:EC 谐振器(SRR_EC),蓝色:VWC 谐振器(SRR_VWC),绿色:参考谐振器(SRR_Ref))。(d、e、f:误差棒表示五次独立测量的标准偏差)。图 4 的原始数据见原始数据文件。
随后,我们通过实验验证了这些仿真结果。在实验室中,使用高增益喇叭读取器天线和便携式读取器天线对 HARVEST 平台进行的 S₁₁频谱测量结果与仿真输出密切匹配:高增益喇叭读取器天线的谐振频率偏差限制在 ±1.4%,便携式读取器天线的偏差限制在 ±3%。两种探测仪的谐振峰位置在所有读取距离下均保持一致,而信号强度逐渐降低。重要的是,在所有情况下,直到 180 厘米的距离,接收信号仍保持在系统的 - 2.5 dB 噪声阈值以上,证实了平台在实际无人机高度下的有效无线读取能力(图 4b、c)。
为应对田间环境变异性(包括无人机高度和方位角变化、多径干扰和背景射频噪声),我们实施了两种互补的信号稳定策略:首先,集成自校准参考谐振器 ------ 该第三个开口环谐振器连接到电气隔离、非穿透性钉状探头,不受土壤体积含水量或电导率的影响。由于其不受环境变化影响而保持稳定,该开口环谐振器通过作为各次测量的一致内部基线,实现了比率传感方法。
为评估该比率方法的有效性,我们计算了整个 60-180 厘米读取范围内第一个(电导率)和第二个(体积含水量)谐振峰相对于第三个参考峰的 | S₁₁| 振幅比。这些比率在不同距离和探测仪类型下保持恒定:仿真结果显示,|S₁₁|_EC / |S₁₁|_Ref = 2.8 ± 0.1,|S₁₁|_VWC / |S₁₁|_Ref = 2.2 ± 0.1;使用高增益喇叭读取器天线的实验结果产生了类似的比率,电导率为 3.1 ± 0.1,体积含水量为 2.2 ± 0.12;使用便携式读取器天线时,电导率比率为 3.1 ± 0.15,体积含水量比率为 2.2 ± 0.16。这种一致性凸显了比率方法的稳健性及其减轻距离或天线特性引起的信号变化的能力。值得注意的是,在所有仿真和实验距离变化中,土壤体积含水量和电导率保持恒定,确保绝对信号振幅的任何变化仅归因于读取距离。比率方法通过将信号振幅参考到稳定、环境隔离的第三个开口环谐振器,保持了一致的测量输出,证实了该方法的可靠性和与读取范围变化的独立性(图 4d-f)。
第二种稳定方法涉及差分背景减法和频谱滤波:每次无人机传感操作包括两次连续测量 ------ 无人机载射频读取器悬停在田间空旷区域(无 HARVEST 传感器)记录背景谱,然后重新定位到传感器正上方记录包含传感器的谱。随后,使用公式(3)通过从包含传感器的测量值中减去背景谱,获得校准后的 S₁₁响应。该减法技术有效消除了特定位置的反射伪影,并分离出传感器的实际谐振响应。为进一步优化信号,应用 Savitzky-Golay 滤波平滑高频噪声,同时保留谐振峰的形状和位置(见补充材料说明 2 和补充材料图 5)。
补充说明 2:基于差分校准与滤波的反向散射读取
为确保在田间条件下可靠提取传感器的谐振特征,我们采用截断平均法结合差分背景校准流程。首先,将无人机载射频探测仪放置在无传感器的裸露土壤区域上方,采集特定场地的杂波和多径反射信号(补充图 3a (i)、(ii));随后,将探测仪直接置于部署好的传感器上方,进行第二组测量(补充图 3a (iii)、(iv))。基于主文稿中的公式(3),在频域中从含传感器响应的截断平均值中减去基线响应的截断平均值,得到校准后的反向散射谱。
如补充图 5b 所示,无传感器时采集的背景测量结果呈现高噪声反射谱,主要受环境伪影和多径干扰影响;在同一环境中部署 HARVEST 传感器后,原始反向散射响应仍保持类似噪声分布,但出现了微弱的谐振活动迹象(表现为谱中较浅且部分被掩盖的凹陷)。差分校准后得到的响应能最大程度减少谱失真,展现出三重开口环谐振器天线的固有谐振特性。为进一步提升信号保真度,采用五点 Savitzky-Golay 滤波器对校准谱进行平滑处理,有效抑制杂散波动,同时保留底层谐振特征的尖锐度。补充图 5c、d 分别展示了校准谱和平滑谱的放大视图,清晰划分出与设计的三重开口环谐振器配置相关的三个不同 S₁₁峰。这些发现凸显了差分校准和信号处理框架的稳健性,能够在实际田间条件下通过无人机探测实现无源土壤传感器的稳定、抗噪声无线读取。
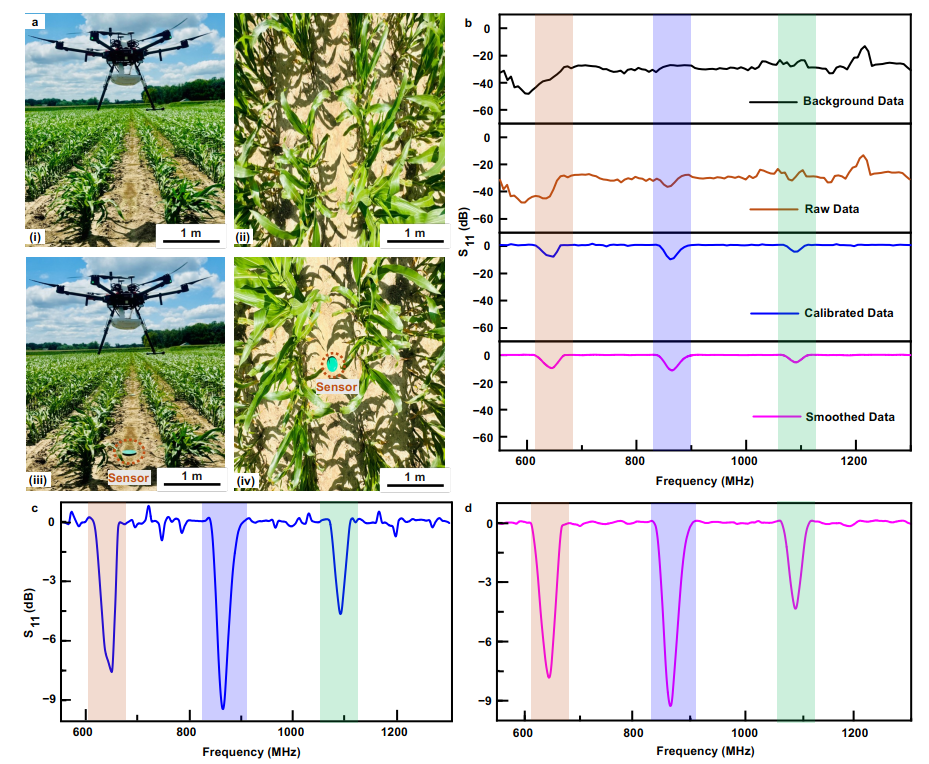 Supplementary Fig. 5 | 田间测量的差分背景校准流程
Supplementary Fig. 5 | 田间测量的差分背景校准流程
a) 田间实验装置示意图,展示无人机载射频读取器系统进行无线频谱测量的侧面和航拍(鸟瞰)视图,包含两种场景:(i、ii) 视场中无 HARVEST 系统的背景测量,(iii、iv) 无人机探测区域内有 HARVEST 系统的有效测量。b) 代表性 S₁₁谱图:背景噪声(无 HARVEST 系统)、HARVEST 原始信号(未校正)、校准谱图(经背景减法和噪声消除后)、最终平滑信号响应。c) 校准谱图的放大视图;d) 平滑谱图的放大视图,清晰标识每个开口环谐振器对应的谐振峰。(谱图中彩色谐振峰:橙色:电导率(EC)谐振器(SRR_EC),蓝色:体积含水量(VWC)谐振器(SRR_VWC),绿色:参考谐振器(SRR_Ref))。Supplementary Fig. 5 的原始数据见原始数据文件。
自校准参考开口环谐振器和背景减法策略共同构成了稳健的信号处理流程。这种组合方法确保 HARVEST 平台即使在无人机位置变化和射频环境波动的情况下,也能提供高保真的频率和振幅读数,从而实现被动无线地下土壤监测的可靠田间部署。
在确定传感器的读取范围并验证其原位校准能力后,有必要确定相邻 HARVEST 平台之间所需的最小分离距离,以避免无线探测过程中的电磁串扰。该评估确保单个传感器能够被准确读取,而不受附近单元的干扰。为进行该测试,使用高增益喇叭天线(HRA)从 180 厘米的固定距离探测一个 HARVEST 平台,同时将第二个相同的 HARVEST 单元相对于第一个单元放置在 0-3.5 米的不同横向分离距离处。在每个距离下,记录固定传感器的反向散射 S₁₁谱,并分析三个谐振峰的品质因数(Q 因子)。
当两个 HARVEST 单元放置在 0-1 米范围内时,观察到显著的频谱失真和峰展宽,表明强互耦合和信号干扰;然而,当横向间距达到 2 米或更大时,谐振峰恢复尖锐,品质因数稳定,表明交叉耦合效应得到抑制。这些结果表明,HARVEST 传感器之间的最小间距为 2 米,以确保电磁隔离并在连续或并行田间部署中保持信号保真度(详见补充材料说明 3 和补充材料图 6)。
补充说明 3:传感器独立工作的空间间距优化
为确定相邻 HARVEST 传感器之间实现电磁隔离所需的最小空间间距,我们开展了多层表征研究,包括全波电磁仿真、暗室实验和实际土壤条件下的田间验证。在每个验证阶段,指定一个 HARVEST 传感器作为固定传感器,将第二个移动传感器以 1 米至 3.5 米的增量间距放置。射频探测仪始终固定在固定传感器正上方 180 厘米处:在仿真环境中,将优化后的传感器置于土壤模型内,在固定传感器正上方 180 厘米处设置波导端口,参数化改变移动传感器与固定传感器的间距,并记录每种间距对应的谐振谱;在暗室中复制相同设置作为对照测量;田间实验中,将由下视宽带天线、纳米矢量网络分析仪(NanoVNA)和微控制器组成的射频探测仪置于固定传感器正上方 180 厘米处,验证仿真和对照测量结果(补充图 6a-c)。
在所有情况下,对 S₁₁谱进行处理,提取固定传感器上三个开口环谐振器(电导率、体积含水量和参考)的谐振频率、峰振幅及相关品质因数(Q 因子)。品质因数定义为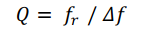
其中,fr为谐振频率,Δf为 3 分贝带宽。结果一致表明,当传感器间距小于 2 米时,相邻 HARVEST 传感器之间的互耦合会降低谱纯度;特别是间距为 1 米时,谐振峰展宽或合并,导致固定传感器的反向散射特征模糊不清,这一现象在仿真、实验室测试和田间试验中均得到证实(补充图 6d-f)。当间距增加至 2 米及以上时,三个谐振峰的品质因数趋于稳定,且峰分离清晰,表明互耦合得到有效抑制,传感器恢复独立工作状态(补充图 6g-h)。基于这些结果,并考虑典型农田的面积规模,HARVEST 部署采用 10 米的传感器间距,该距离能确保传感器之间有效的电磁解耦,为体积含水量和电导率的高分辨率测绘提供足够的空间保真度。
 Supplementary Fig. 6 | HARVEST 传感器最小间距确定
Supplementary Fig. 6 | HARVEST 传感器最小间距确定
a) 仿真装置示意图,展示移动 HARVEST 传感器与固定 HARVEST 单元的相对位置,平面波(PLW)源作为射频探测仪。b) 暗室中的实验室装置,使用喇叭天线探测固定 HARVEST 单元,同时改变移动 HARVEST 传感器的位置。c) 田间装置航拍图,无人机载读取器探测固定 HARVEST 单元,同时重新定位另一个 HARVEST 单元以评估互耦合效应。d) 仿真、e) 实验室、f) 田间实验中,随着移动传感器距离变化,固定 HARVEST 单元记录的 S₁₁谱图。g) 体积含水量(SRR_VWC)、h) 电导率(SRR_EC)、i) 参考(SRR_Ref)对应的谐振峰品质因数(Q 因子)随移动与固定 HARVEST 单元间距(厘米)的变化曲线(跨三种实验装置)。(谱图中彩色谐振峰:橙色:电导率谐振器(SRR_EC),蓝色:体积含水量谐振器(SRR_VWC),绿色:参考谐振器(SRR_Ref))。Supplementary Fig. 6 的原始数据见原始数据文件。
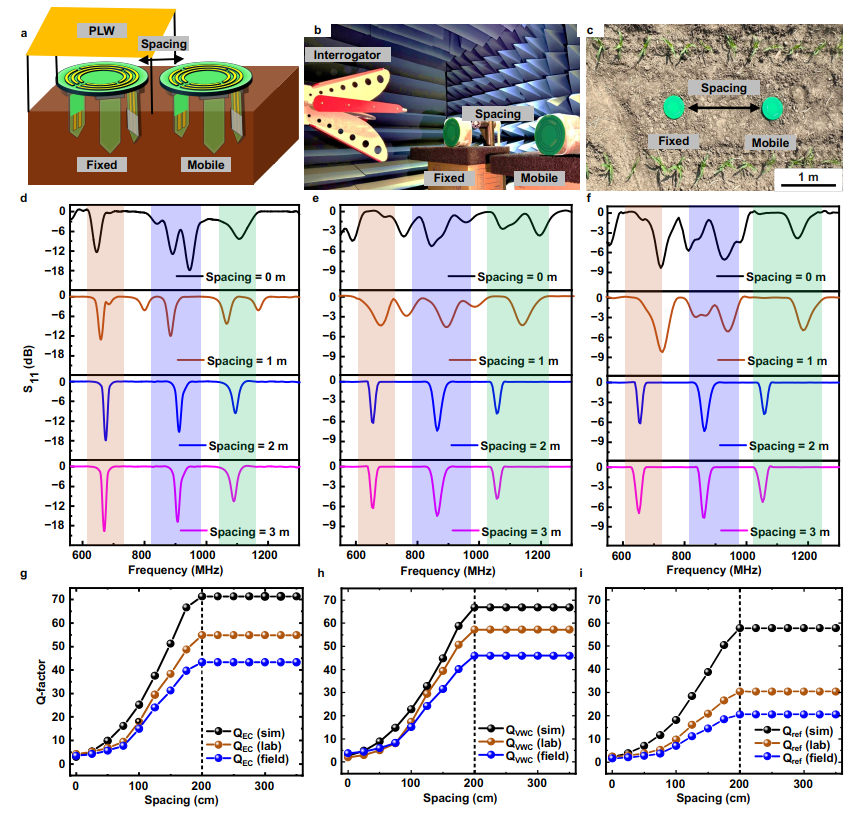
在评估 HARVEST 的无线读取范围并验证其原位自校准和频谱滤波方法后,我们评估了系统对土壤体积含水量和电导率变化的敏感性。在该分析中,体积含水量专用谐振器的频率偏移相对于参考开口环谐振器计算,而土壤电导率的影响通过电导率专用谐振器与参考谐振器之间的振幅比量化。使用高增益喇叭读取器天线和便携式读取器天线评估了这些敏感性指标的性能(图 5)。
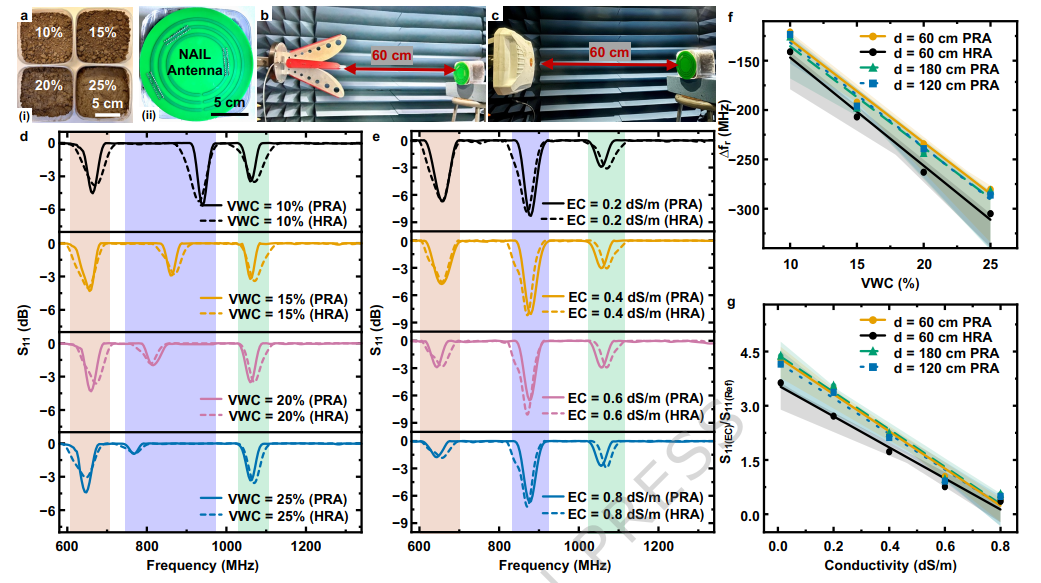 Fig. 5 | HARVEST 传感器对土壤 VWC 和 EC 敏感性的实验室表征
Fig. 5 | HARVEST 传感器对土壤 VWC 和 EC 敏感性的实验室表征
a) (i) 不同 VWC 水平(10%、15%、20%、25%)的制备土壤样本俯视图;(ii) HARVEST 传感器在土壤样本中的放置方式。b) 暗室中使用喇叭参考天线Horn Reference Antenna (HRA)作为射频探测仪的无线测量装置。c) 暗室中使用便携式读取器天线(PRA)作为射频探测仪的无线测量装置。HARVEST 在 d) 不同 VWC(10%-25%)和 e) 不同 EC(0.01-0.8 dS/m)下使用 HRA 和 PRA 测得的校准 S₁₁谱响应。f) 不同读取距离下,VWC 谐振器(SRR_VWC)相对于参考谐振器(SRR_Ref)的差分谐振频率偏移随 VWC 变化的校准曲线。g) 不同读取距离下,EC 谐振器(|SRR_EC|)相对于参考谐振器(|SRR_Ref|)的峰振幅相对变化随 EC 变化的校准曲线。(谱图中彩色谐振峰:橙色:EC 谐振器(SRR_EC),蓝色:VWC 谐振器(SRR_VWC),绿色:参考谐振器(SRR_Ref))。(f、g:阴影区域表示线性拟合的 95% 置信区间)。图 5 的原始数据见原始数据文件。
为测试体积含水量敏感性,制备了体积含水量为 10%-25% 的土壤样本,并将 HARVEST 传感器放置在土壤样本中,使钉状探头位于土壤内部,三重开口环谐振器天线位于土壤外部,面向探测天线(图 5a)。同时,为测试电导率敏感性,制备了另一组样本:体积含水量固定(8%),电导率值从 0.01 变化至 0.8 dS/m。图 5b、c 展示了射频读取器和传感器设置的实验配置和相对位置。图 5d 呈现了 HARVEST 平台在不同体积含水量下的相应 S₁₁谱。
随着土壤体积含水量从 10% 增加至 25%,观察到中间峰(体积含水量开口环谐振器)的谐振频率明显下移 17%,振幅逐渐降低。相比之下,参考和谐振器电导率峰保持相对稳定,偏差小于 ±2.45%。对于电导率敏感性评估,将土壤电导率增加至 0.8 dS/m 导致第一个谐振峰(电导率开口环谐振器)的振幅降低 77%,而其频率保持恒定(图 5e)。值得注意的是,在该电导率范围内,参考和体积含水量谐振峰均未受影响。这些频谱特性在使用高增益喇叭读取器天线和便携式读取器天线探测系统时均一致观察到。
土壤体积含水量和电导率的提取校准曲线如图 5f、g 所示:对于体积含水量监测,体积含水量和谐振器参考之间的差分频率偏移呈现线性趋势,敏感性为 9.45 MHz/%(调整后 R²=0.94),在 60、120 和 180 厘米的读取距离下,标准偏差为 ±1.45%;对于电导率监测,电导率和参考谐振器之间的峰振幅比也显示出 4.34 dB/(dS・m⁻¹) 的线性响应(调整后 R²=0.95),在相同读取距离下,标准偏差为 ±1.83%。这些结果不仅证实了 HARVEST 平台的高敏感性和稳健性,还验证了其自校准框架在不同探测距离下保持测量准确性的有效性。
田间部署和农艺验证
为验证 HARVEST 平台在实际田间条件下的长期性能、耐用性和农艺适用性,我们在活跃玉米田部署了完整的无线传感器网络,并在整个作物生长周期内运行。目标是评估系统在动态环境和农业条件下对地下土壤体积含水量和电导率进行连续、免维护监测的能力。
定制读取单元安装在大疆御系列(DJI Mavic-series)无人机上:该设置包括固定在无人机起落架之间下方的便携式读取器天线,以及连接到纳米矢量网络分析仪的微控制器,微控制器封装在无人机顶部的轻质丙烯酸外壳中(图 6a (i))。田间数据采集期间,无人机在每个 HARVEST 单元上方垂直悬停约 5 秒进行测量,确保稳定的视距(LOS)通信通道(图 6a (ii))。安装在无人机底部的摄像头拍摄俯视图像,记录整个作物生长过程中传感器的位置和可见性(图 6a (iii))。
 Fig. 6 | 玉米全生育期 HARVEST 的无人机辅助田间测量
Fig. 6 | 玉米全生育期 HARVEST 的无人机辅助田间测量
a) (i) 无人机搭载便携式读取器模块的照片;(ii) 无人机搭载读取器悬停在玉米田 1 号位置的 HARVEST 系统上方;(iii) 玉米田内四个 HARVEST 系统部署位置的航拍图,每个位置均与商用 TEROS-12 土壤探头共存,用于地面实测数据对比。b) 玉米生长周期示意图,突出不同营养生长和生殖生长阶段。使用 BioRender 制作。c) (i--viii) 1 号位置 HARVEST 单元在多个作物生长阶段的航拍图。d) (i--viii) 1 号位置 HARVEST 单元在多个作物生长阶段的侧视图。e) 不同作物生长阶段记录的 HARVEST 的 S₁₁谱。f) 1 号位置无人机测量中不同作物生长阶段记录的相应信噪比(SNR)。g) 整个作物周期内,四个田间位置的 HARVEST 记录的土壤 VWC 和 EC 时间序列(测量值 - M),与 TEROS-12 探头的地面实测数据(GT)对比。(谱图中彩色谐振峰:橙色:EC 谐振器(SRR_EC),蓝色:VWC 谐振器(SRR_VWC),绿色:参考谐振器(SRR_Ref))。图 6 的原始数据见原始数据文件。
在普渡大学农业研究与教育中心(ACRE)的一片活跃玉米田(美国印第安纳州西拉法叶普渡大道 610 号,邮编 47907)中,四个 HARVEST 单元以 10 米的间距部署。选择该间距是为了反映农田的异质性,并确保不同微环境的空间分辨测量。每个单元的钉状传感探头垂直插入地下土壤,三重开口环谐振器天线暴露在地面上方,用于无线探测。
田间部署覆盖了作物生长周期的大部分时间,从早期营养生长阶段(VE)持续到生殖生长阶段(R1)。如图 6b 所示,玉米生长阶段从出苗期(VE)经过抽雄期(VT)到早期籽粒发育期(R1)。从俯视和侧面视角对田间的视觉观察(图 6c、d)证实,植被高度从 5 厘米增加至 170 厘米,逐渐降低了无人机读取器与 HARVEST 单元之间的可见性和视距。在此期间,在传感器位置 1 采集的反向散射信号谱显示,随着冠层增厚,噪声水平增加(图 6e)。信号质量的下降量化如图 6f 所示:信号噪声比(SNR)从 VE 阶段的 5.6 ± 0.2 dB 降至 V3 阶段的 4 dB,在 VT 阶段稳定在 3.6 ± 0.3 dB;到 R1 阶段,由于冠层干扰,所有四个传感器的信号噪声比均降低了约 2 dB。尽管如此,三个谐振峰仍然可区分,表明 HARVEST 的读取能力足以支持直至 R1 阶段的可靠土壤监测。
为验证传感器准确性,我们将 HARVEST 系统的田间土壤体积含水量和电导率数据与使用商用 TEROS-12 传感器和有线数据记录仪采集的地面实测数据进行了基准对比(图 6g)。从 VE 到 V7 阶段,位置 1 和 4 的体积含水量稳定在 20 ± 2% 左右,而位置 2 和 3 则先下降 4%,随后急剧上升,表明局部干旱和再水化过程。同样,位置 1-3 的电导率值呈现类似趋势,而位置 4 的基线较低,为 80 ± 15 μS・cm⁻¹。这些变化凸显了 HARVEST 检测局部土壤异质性的能力。在 V7 至 V10 阶段,位置 2-4 的体积含水量(约 4%)和电导率(约 80 μS・cm⁻¹)均出现显著下降,可能反映了根系吸水和养分吸收的增加;相比之下,位置 1 的下降更为平缓。从 V10 到 R1 阶段,抽雄期体积含水量下降,随后位置 1-3 的体积含水量恢复,而位置 4 稳定在约 14%;对于电导率,位置 1-3 逐渐增加(约 20 至 40 μS・cm⁻¹),而位置 4 先急剧上升后下降。定量来看,HARVEST 测量结果与地面实测数据吻合良好:在整个监测期间,体积含水量和电导率的偏差分别保持在 2.42 ± 1.86% 和 3.12 ± 1.32% 以内。
尽管四个 HARVEST 传感器单元仅相距 10 米,但它们捕获了地下土壤体积含水量和电导率高达 35% 的变异性,凸显了精准农业中高分辨率、空间分布式土壤传感的关键需求。在基于无人机的田间测量过程中,HARVEST 表现出偏振不敏感响应:无论无人机载读取器的入射波偏振(垂直或水平)如何,三重开口环谐振器天线始终对体积含水量和电导率的变化呈现清晰可区分的谐振响应。这种行为表明天线的准圆偏振模式,支持无人机在各种方位角下的稳定无线探测(详见补充材料说明 4 和补充材料图 7)。
补充说明 4:HARVEST 读取的极化稳健性评估
为表征 HARVEST 传感器的极化特性,我们利用射频探测仪的两个端口开展实验研究:将 HARVEST 传感器固定放置,探测仪天线置于其上方;首先,将传感器在方位面内以 30° 为步长从 0° 旋转至 180°,每个方位角下分别记录端口 1(垂直极化)和端口 2(水平极化)激活时的测量结果;随后,开展另一组实验,将探测仪与 HARVEST 传感器的距离以 30 厘米为增量从 60 厘米变化至 180 厘米,每个高度下通过两个端口测量传感器的谐振响应,评估极化特性随距离的一致性(补充图 7a、b)。
结果显示,在整个方位角扫描过程中,两个极化端口记录的反向散射响应高度一致:谐振频率偏差仅为 0.54%-1.02%,振幅偏差为 0.62%-1.13%;此外,不同读取距离下两个端口的响应几乎一致,偏差可忽略(0.85%)(补充图 7c、e)。值得注意的是,无论激活哪个端口,传感系统均能实现原位校准(补充图 7d、f)。这些发现证实,HARVEST 传感器具有近圆极化特性,能高效响应探测仪天线的两种正交极化 ¹。该配置具有显著的实际优势:由于 HARVEST 传感器为圆极化,双极化探测仪天线的任意一个端口均可作为激活激励端口,提升了对田间对准偏差的稳健性,且在一个端口损坏时可作为备用。
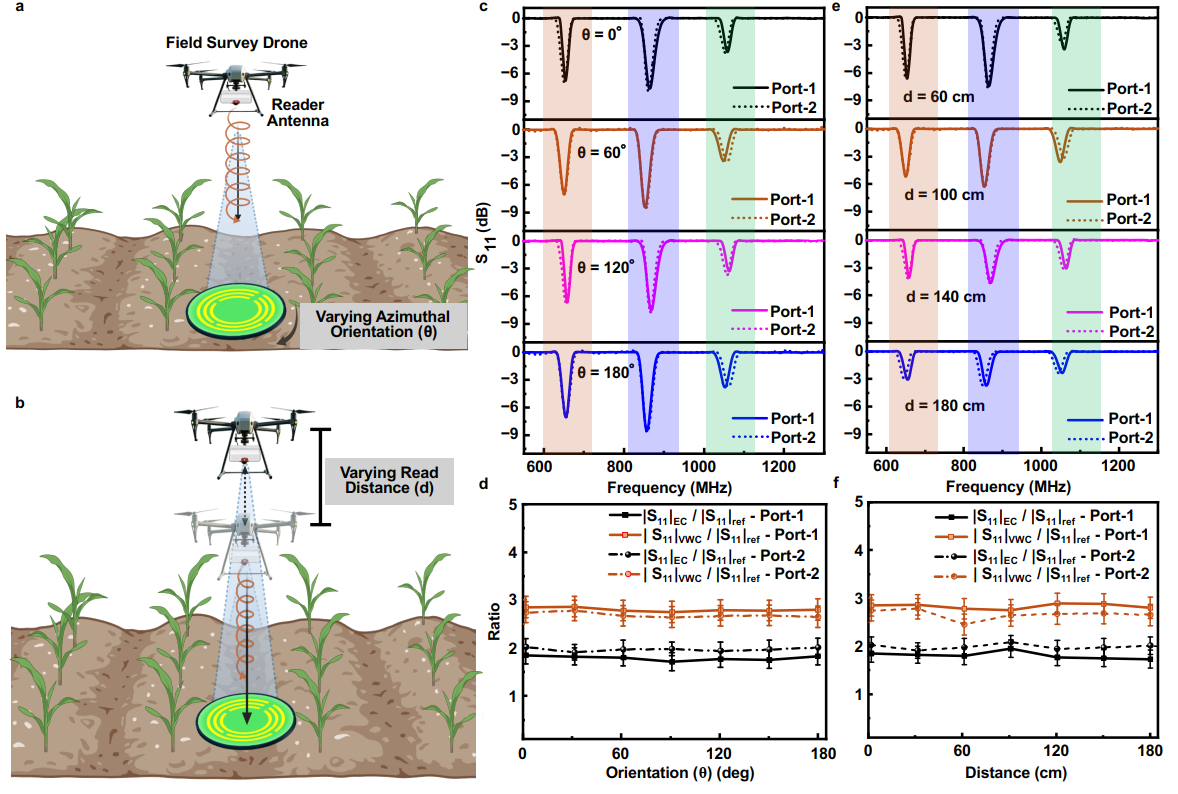 Supplementary Fig. 7 | 三重开口环谐振器天线的圆极化特性验证
Supplementary Fig. 7 | 三重开口环谐振器天线的圆极化特性验证
a) HARVEST 天线相对于探测仪读取器的方位角变化示意图。b) HARVEST 天线与探测仪读取器之间读取距离变化的田间装置示意图。使用 BioRender 制作。c) 探测仪天线 1 端口(线极化,0°)和 2 端口(水平极化,90°)激励下,HARVEST 系统旋转时记录的 S₁₁谱图。d) 体积含水量和电导率开口环谐振器相对于参考开口环谐振器的峰振幅比(|S₁₁|)随方位角变化,显示变化极小,证实极化不敏感性。e) 读取距离变化时,探测仪天线 1 端口和 2 端口激励下的 HARVEST S₁₁谱图。f) 不同读取距离下,体积含水量和电导率开口环谐振器相对于参考开口环谐振器的峰振幅比(|S₁₁|),证实两种极化状态下均具有稳健的原位自校准和一致读取性能。(谱图中彩色谐振峰:橙色:电导率谐振器(SRR_EC),蓝色:体积含水量谐振器(SRR_VWC),绿色:参考谐振器(SRR_Ref))。(d、f:误差棒表示五次独立测量的标准偏差)。Supplementary Fig. 7 的原始数据见原始数据文件。
该系统还能够克服潜在的安装相关伪影,特别是钉状探头与土壤基质之间的气隙,这些气隙否则会阻碍电接触并降低传感准确性。实验表征表明,在埋置过程中手动压实土壤或允许自然降雨使土壤在钉状探头周围沉降,均可有效消除气隙。这种自校正行为实现了稳定一致的长期测量,即使在初始安装时存在微小气隙(见补充材料说明 5 和补充材料图 8)。重要的是,HARVEST 实现了与商用土壤探头相当的性能 ------ 后者通常依赖有线连接和庞大的数据记录仪 ------ 但设计更简单、可扩展性更强。与传统系统不同,HARVEST 完全无源、无电池且兼容无人机,能够以紧凑、免维护的形式 factor,通过快速飞越扫描大型传感器网络,实现双参数传感(体积含水量和电导率)。这些特性使 HARVEST 特别适合智能农业的大规模部署,支持成本效益高、实时的土壤状况监测,这对精准灌溉和盐度管理至关重要。
补充说明 5:土壤 - 探头接触对测量可靠性的影响
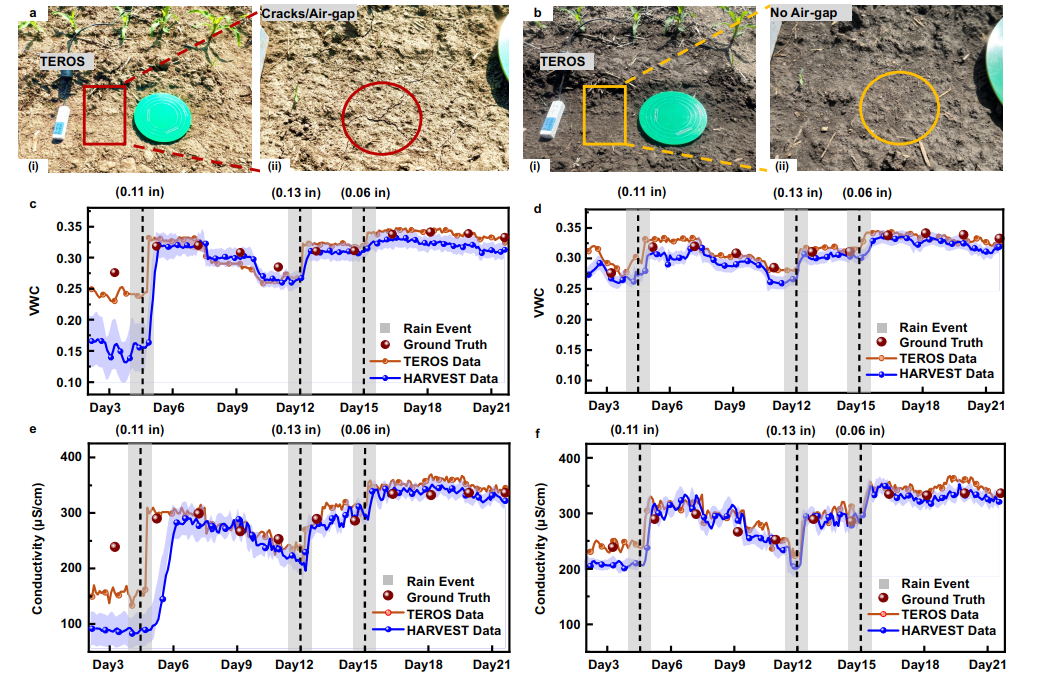
为评估气隙对传感器性能的影响并解决安装引发的伪影问题,我们采用两种不同部署配置开展对照田间研究:
配置 1:将 HARVEST 和商用 TEROS 传感器插入土壤,探头周围存在可见气隙。
配置 2:插入两个传感器后,在埋置过程中添加少量水,消除气隙,确保土壤与探头紧密接触。
两种配置在同一块玉米田内并行部署,通过两个传感器监测地下土壤体积含水量和电导率,持续 21 天并对比测量结果(补充图 8a、b)。配置 1 中,由于存在气隙,HARVEST 和 TEROS 的地下土壤体积含水量及电导率数据与重力法体积含水量测量和实验室电导率测试得到的地面实测参考值存在明显偏差(约 15%);相比之下,配置 2 中土壤与探头接触良好,三组数据(HARVEST、TEROS 和地面实测)的变化趋势显著更平滑,一致性更好。值得注意的是,第 4 天自然降雨后,配置 1 的数据开始向配置 2 收敛,可能是由于水分渗透减少了气隙,增强了土壤与探头的接触(平均体积含水量约 32%,电导率约 310 微西门子 / 厘米)。因此,若在发芽前一周部署传感器,这些气隙会逐渐自然校正,确保 HARVEST 系统在典型环境条件下的稳健性。此外,由于测量周期长达 120 天,系统有充足时间稳定并提供准确读数:观察发现,第 9 天后,无论环境条件如何,两种配置的地下土壤体积含水量和电导率数据均与地面实测值一致(补充图 8c-f)。
Supplementary Fig. 8 | 安装条件对传感器性能的影响
a) 装置 1 的田间设置:(i) HARVEST 和商用 TEROS-12 传感器安装在干燥土壤中,安装后未浇水;(ii) 该条件导致探头 - 土壤界面可能出现气隙和裂缝。b) 装置 2 的田间设置:(i) HARVEST 和 TEROS-12 安装后立即表面浇水,促进电极与周围土壤的紧密接触;(ii) 减少气隙可能性,改善初始传感器 - 土壤耦合。c) 装置 1 中 HARVEST 记录的一个月体积含水量测量曲线。d) 装置 2 中 HARVEST 记录的一个月体积含水量测量曲线。e) 装置 1 中对应的一个月电导率测量曲线。f) 装置 2 中对应的一个月电导率测量曲线。Supplementary Fig. 8 的原始数据见原始数据文件。
讨论
监测地下土壤体积含水量和电导率对于评估决定植物吸水、养分运输和盐胁迫的根区条件至关重要。在现有技术中,无源无线传感(尤其是基于 RFID 的系统)为无需嵌入式电子设备或电池的可扩展、低成本分布式土壤监测提供了有前景的途径。这些系统通常分为两类:利用专用集成电路(ASIC)的带芯片传感器,以及通过谐振器几何结构或材料相关电磁特性直接编码信息的无芯片 RFID 传感器。
已有多项研究探索了这些方法:例如,Kim 等人开发了一种喷墨印刷的带芯片 RFID 土壤含水量传感器,用于低成本农业监测。他们的设备在空气中的读取距离约为 1.5 米,传感叉指电极(IDE)埋在土壤表面下 5 厘米处。传感依赖于含水量诱导的电容变化,该变化调制芯片的反向散射响应 ³⁸。另一例中,Fonseca 等人展示了一种完全埋在地下 1 厘米处的超高频 RFID 传感器,读取距离约为 1.2 米 ³⁹。尽管这两种系统均能正常工作,但它们对专用集成电路的依赖增加了复杂性、功耗限制和成本。
为解决这些局限性,无芯片 RFID 技术省去了专用集成电路,而是通过标签电磁响应的固有变化编码传感信息。我们团队此前报道了此类方法,利用无源谐振器(如短路偶极子和曲折线设计)通过频率偏移检测体积含水量。尽管这些系统表现出强线性,但它们的性能受到土壤介电损耗的限制,需要浅埋(<5 厘米)并保持短探测距离(约 40 厘米)。此外,无芯片 RFID 传感器通常面临其他挑战,包括分辨率有限、带宽窄以及依赖读取器方向,使其在实际田间条件下可靠性较低。
对此,本研究提出了 HARVEST:一种完全无源、无芯片的无线传感平台,专为稳健的多参数地下土壤监测设计。HARVEST 采用分离式架构,钉状传感探头与地面上方的三重开口环谐振器天线接口,用于无线探测。这种分离设计提高了电磁耦合,减少了周围土壤的信号衰减。HARVEST 平台通过完整的流程进行了验证 ------ 从电磁仿真、使用便携式读取器的实验室表征,到最终使用定制无人机载探测仪在活跃玉米田进行整个生长季节的实际部署。
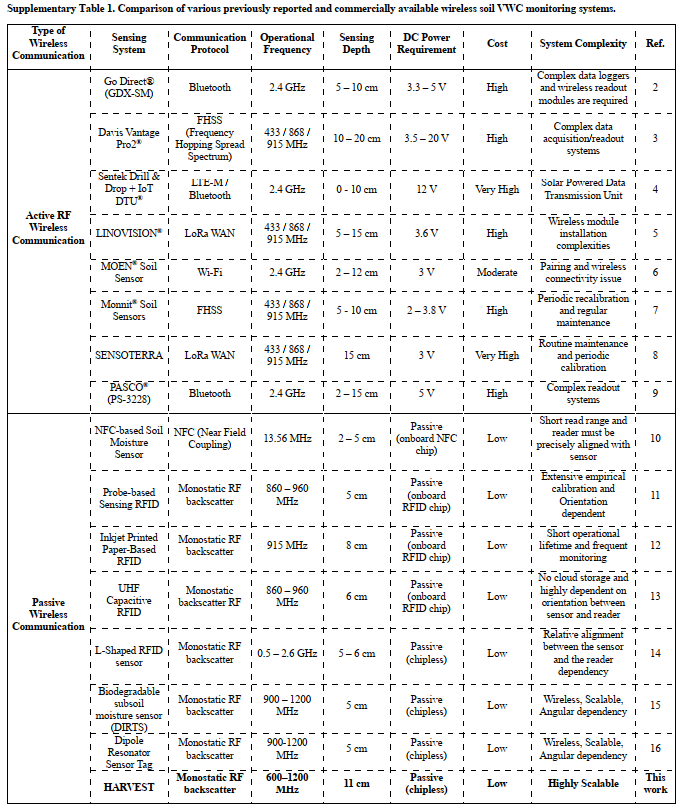
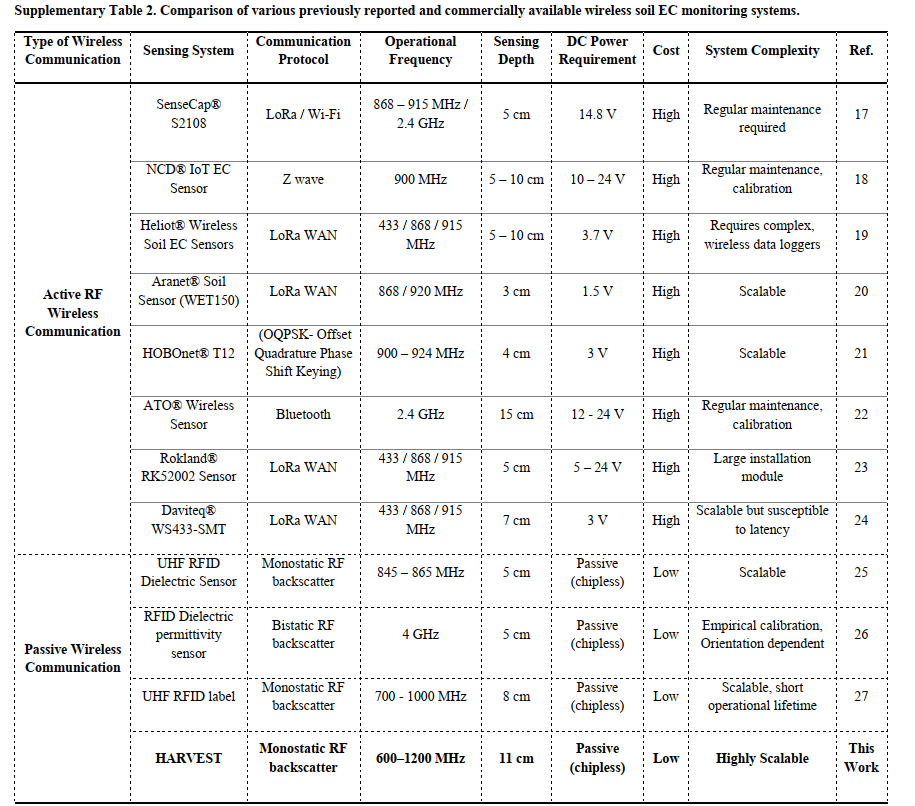
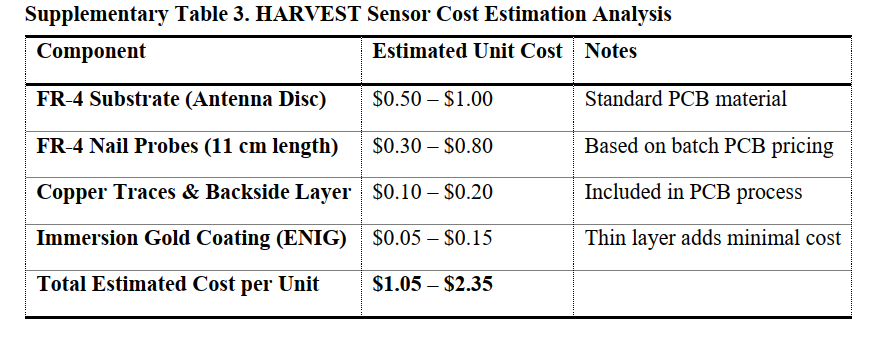
该传感器对体积含水量的敏感性约为 9.45 MHz/%,对电导率的敏感性约为 4.32 dB/dS・m⁻¹,与商用土壤探头和先前报道的基于 RFID 的解决方案相当或更优(补充材料表 1 和表 2)。至关重要的是,这种传感能力是通过完全无源、无芯片设计实现的,估计单位成本为 1-3 美元,相比传统有源或基于 RFID 的探头显著降低了成本(补充材料成本分析信息和表 3)。
补充说明:成本分析信息
HARVEST 平台的核心优势之一是制造成本极低:每个传感器单元的生产成本约为 1-2.35 美元,其中 FR-4 基板和钉状传感探头占主要成本,薄金涂层仅增加微不足道的成本。这种经济性使得在大面积农田部署密集传感器网络成为可能,能够以传统系统难以实现的成本规模进行土壤参数高分辨率测绘。尽管成本低廉,该传感器仍具备足够的稳健性,可在整个作物周期内使用,且能跨多个季节重复利用,进一步提升了成本效益。这些特性使 HARVEST 成为精准农业中可扩展、经济可行的解决方案。
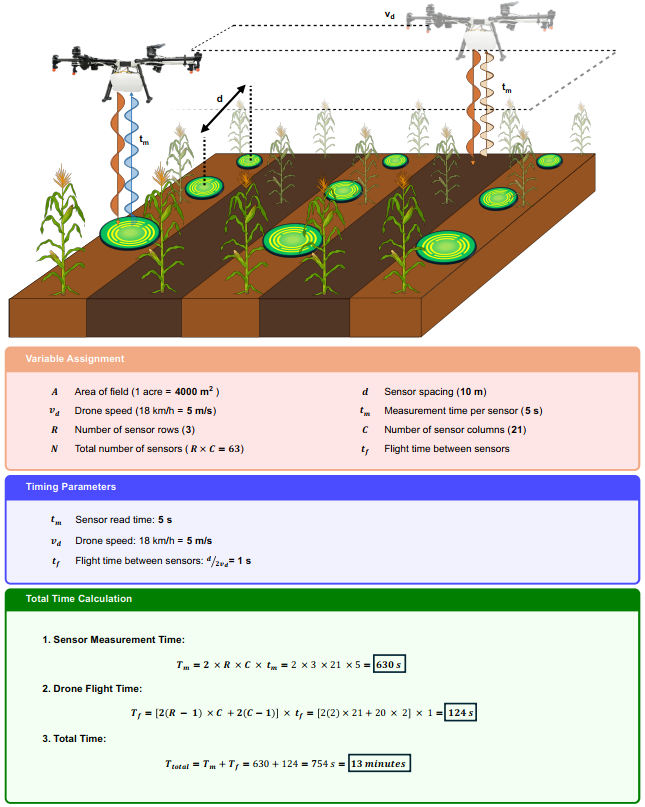
分离式传感器 - 天线布局实现了从地面上方高达 1.8 米的可靠无线读取,而传感探头仍埋在根区深度。尽管采用顺序探测方案,但扫描时间与无人机工作流程兼容:例如,1 英亩(约 4000 平方米)的田地,部署约 63 个间距为 10 米的 HARVEST 单元,可在约 13 分钟内完成全面扫描(补充材料说明 6 和补充材料图 9)。该性能与最先进的 RFID 系统相比具有竞争力,后者通常读取距离较短或需要近地表部署。
补充说明 6:无人机读取的运行时序与可行性分析
基于实证时序测量和实际无人机运行约束,我们在 1 英亩(约 4000 平方米,200 米 ×20 米)的田间对所提出的 HARVEST 传感系统进行了性能评估。假设传感器以 10 米间距均匀部署,覆盖整个区域约需 63 个传感器;每个传感器的探测和数据采集(包括无人机重新定位和频谱读取)约需 12 秒,整个田间覆盖的总时间估计为 13 分钟(补充图 9)。该运行时长完全在商用无人机平台的续航范围内(搭载中等有效载荷约 1.5 千克,如大疆 Matrice 300,在标准环境条件下续航可达 30 分钟)。便携式读取器模块(包括便携式读取器天线、纳米矢量网络分析仪和微控制器)的总重量约为 900 克,远低于有效载荷阈值,可为部署过程中的垂直机动、悬停稳定或额外读取通道提供充足能量储备。
Supplementary Fig. 9 | 无人机田间扫描的飞行时间估算
1 英亩农田部署 HARVEST 传感器后的土壤参数采集总时间示意图。无人机载无线读取器依次探测每个分布式传感器节点,获取体积含水量和电导率数据。
重要的是,本研究涵盖了从谐振器级电磁设计到田间规模验证的全范围。HARVEST 系统在整个玉米作物物候期内部署,实现了高分辨率的体积含水量和电导率时空测绘。即使在植被冠层增加和土壤条件变化的情况下,平台的稳健性也得到了证实。
尽管如此,仍存在一些局限性和实际考虑因素:首先,无人机探测需要与地面上方天线精确垂直对准,对准偏差会降低信号强度并影响谐振检测。这一挑战在作物后期生长阶段(如 R1)更为明显,此时冠层高度增加导致信号噪声比降低;其次,风或雨等天气条件会干扰无人机稳定性并影响测量一致性⁴⁰;第三,在异质性土壤中的长期部署可能导致探头污染、退化或随时间失谐。
为应对这些挑战,可设想多项未来改进:通过自适应飞行路径控制和实时反馈进行对准校正,可增强无人机导航⁴¹;围绕预期谐振频率的匹配滤波可提高高损耗环境中的信号噪声比⁴²;通过超疏水涂层、简化几何结构(减少污染)和稳健封装,可提高材料耐用性;通过探索低损耗基板、多层架构和更高品质因数结构,可进一步优化谐振器性能⁴³⁻⁴⁵。除技术改进外,HARVEST 可扩展至多模态传感(如 pH 值、温度、微生物活性)、波束成形和频分复用,以支持更密集的部署⁴⁶⁻⁴⁷。HARVEST 生成的数据还可集成到变量施肥农业平台中,实现精准灌溉或养分施用等实时干预⁴⁸。即使在短距离(如 10 米)内,检测地下土壤体积含水量和电导率的空间异常的能力,也说明了精准农业中密集、分布式和自主传感基础设施的关键需求。总之,HARVEST 提供了一种可扩展、超低成本且无芯片的无线土壤监测平台,能够实现稳健的双参数传感。其无源特性、无人机兼容性和强大的田间验证,使其成为下一代数字农业的变革性解决方案,能够提高资源效率、减少环境影响并支持不断增长的全球人口的粮食安全。
方法
电磁仿真
HARVEST 传感器整合了三个钉状传感探头和一个圆形三重开口环谐振器天线,用于无线监测土壤电导率和体积含水量。天线由三个同心、等间距的圆形开口环谐振器组成,制造在圆形 FR-4 印刷电路板基板上(介电常数 εᵣ=4.25,损耗角正切 tanδ=0.02)。每个开口环谐振器通过在闭环环形谐振器中引入一个开口形成,在间隙处建立局部电容元件。钉状探头同样是 FR-4 基印刷电路板,形状类似钉子,沿长度方向包含两个平行的镀金铜电极,用作原位土壤传感器。
为优化开口环谐振器和钉状探头电极的物理尺寸及元件间间距,我们使用 ANSYS HFSS 2024 R1 及其三维有限元法(FEM)求解器进行了详细的电磁仿真。高频仿真采用 125,342 个单元的四面体网格,波导端口沿 Z 轴对齐,并位于天线上方不同高度,以模拟无人机载射频探测。这些配置用于提取三重开口环谐振器天线的远场 S₁₁参数。
使用 ANSYS 的 Maxwell 低频求解器(5,000 个四面体网格单元)单独仿真钉状探头:在电极端子上施加 1V 激励电位,以评估电场分布和阻抗特性。表征后,将探头虚拟集成到天线模型中,以仿真全系统行为。
HARVEST 系统的工作频率范围设定在 600-1200 MHz(超高频频段),以最大限度减少土壤中的衰减。为分辨三个不同的谐振峰(对应参考、体积含水量和电导率测量),将开口环谐振器半径参数化设置为 3-6 厘米,间距参数化设置为 0.2-1.2 厘米,并通过多次迭代仿真确定最佳值。每个开口环谐振器包含六个开口,排列成两种模式:一组三相开口(0°、110° 和 210°)用于钉状探头集成,另一组垂直开口用于防止探头插入土壤时短路。
在 ANSYS 的 Maxwell 求解器中还优化了钉状探头电极的几何形状和间距以及印刷电路板基板尺寸。为确保钉状探头与其对应的开口环谐振器之间的稳健电连接,在铜迹线接口处模拟了同轴连接器,并对其半径进行参数化,以实现钉状电极与开口环谐振器之间的阻抗匹配信号传输。具体而言,最小的开口环谐振器连接到无功能钉状探头(无电极)作为参考,中间的开口环谐振器连接到带有阻焊剂覆盖钝化区域的体积含水量传感钉状探头,最大的开口环谐振器连接到无钝化的电导率传感钉状探头 ------ 允许与土壤直接电接触。
全系统仿真分两个阶段进行:首先在空气中,然后在分层土壤模型中(模拟实际部署条件)------ 钉状探头埋在地下,天线留在表面上方。为模拟体积含水量对介电特性的影响,使用 Topp 方程将土壤体积含水量与其有效介电常数(εₑff)相关联。在体积含水量为 0%-25% 的范围内进行仿真,分析相应的谐振频率(fᵣ)偏移。为模拟土壤电导率,根据已知的电导率相关性(在 900 MHz 下测量)改变材料的介电损耗(损耗角正切)。仿真土壤电导率范围为 0.01-0.8 dS/m,以评估其对 | S₁₁| 的影响。最后,为评估系统对无人机方位角的角度敏感性,固定射频波导端口位置,同时将传感器在方位角上从 0° 以 30° 的增量旋转至 180°。仿真结果(参见补充材料图 10)证实,当无人机直接位于传感器上方时,HARVEST 在各种无人机方位角下均能保持稳定的体积含水量和电导率读数,信号衰减或谐振失真极小。
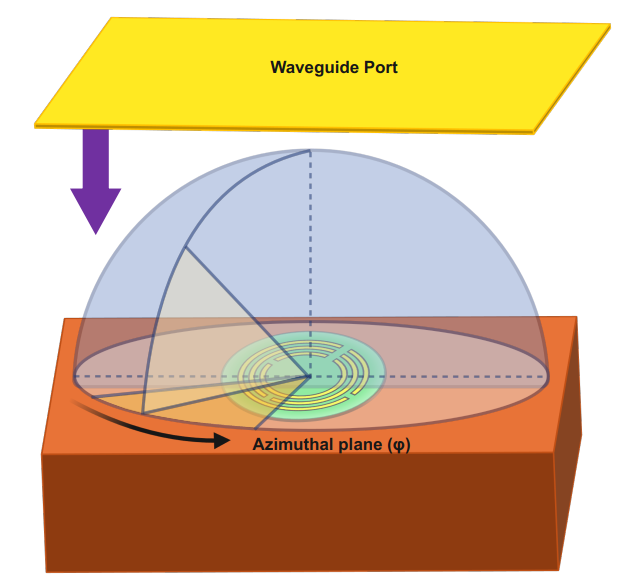 Supplementary Fig. 10 | HARVEST 角响应表征的方位面旋转
Supplementary Fig. 10 | HARVEST 角响应表征的方位面旋转
示意图展示 HARVEST 系统沿方位面(φ)旋转,用于评估射频探测期间的角度独立性。
传感器制造
HARVEST 传感器(包括钉状探头和三重开口环谐振器天线)的制造采用基于电磁仿真确定的优化几何形状的标准印刷电路板制造技术。为建立天线与钉状探头之间的连接,将 5530841-2 印刷电路板卡缘连接器(CONN SEC II 15 POS 100C/L,泰科电子,瑞士沙夫豪森)通过电镀通孔焊接到天线上 ------ 这些通孔穿过印刷电路板,将底部安装的连接器连接到顶部的开口环谐振器,使每个钉状探头能够连接到其对应的谐振器。
天线设计在 FR-4 基板下方包含一个接地平面,以抑制后瓣辐射并屏蔽开口环谐振器免受土壤产生的电磁干扰。为进一步将系统与环境隔离,天线的背面(包括接地平面)涂有 500 微米厚的阻焊剂,作为钝化屏障。这确保了接地平面与土壤之间没有直接的电接触或物理接触,在潮湿环境中运行时保持开口环谐振器的谐振特性。使用诺信 Ultimus V EFD 流体分配器(美国俄亥俄州西湖),以 30 毫米 / 秒的速度和 10 磅 / 平方英寸的压力,将 500 微米厚的紫外光固化阻焊剂(TMYLOKU,中国)涂覆到体积含水量和电导率钉状传感器的互连区域。涂覆的阻焊剂在 Sun Ray 紫外泛光灯(美国马萨诸塞州西斯普林菲尔德 Uvitron 国际公司)下固化 30 分钟,形成共形介电封装层。为提高体积含水量测量的电容敏感性,体积含水量钉状探头的活性传感区域进一步涂覆了 50 微米厚的阻焊剂层,提供介电隔离,同时保持与周围土壤体积含水量的有效电容耦合。相比之下,电导率钉状探头的活性区域特意不覆盖,以确保与土壤的直接电接触,实现准确的电导率传感。这种钝化策略不仅确保了一致的介电性能,还保护了传感器在田间部署中免受污染和退化。
为实现长期环境稳健性,三重开口环谐振器天线的顶部和底部表面均涂有 25 微米厚的聚四氟乙烯(Teflon)疏水介电层。这种疏水涂层具有双重作用:防止暴露的顶部天线迹线受到环境污染,并使底部接地平面电隔离,避免因土壤水分渗透导致短路。完成钝化和涂覆步骤后,将传感器和天线组件用乙醇和去离子水彻底冲洗,用氮气干燥,并在环境条件下储存以备后续部署(参见补充材料图 11,了解制造的钉状探头、天线和完全组装的 HARVEST 系统的图像)。
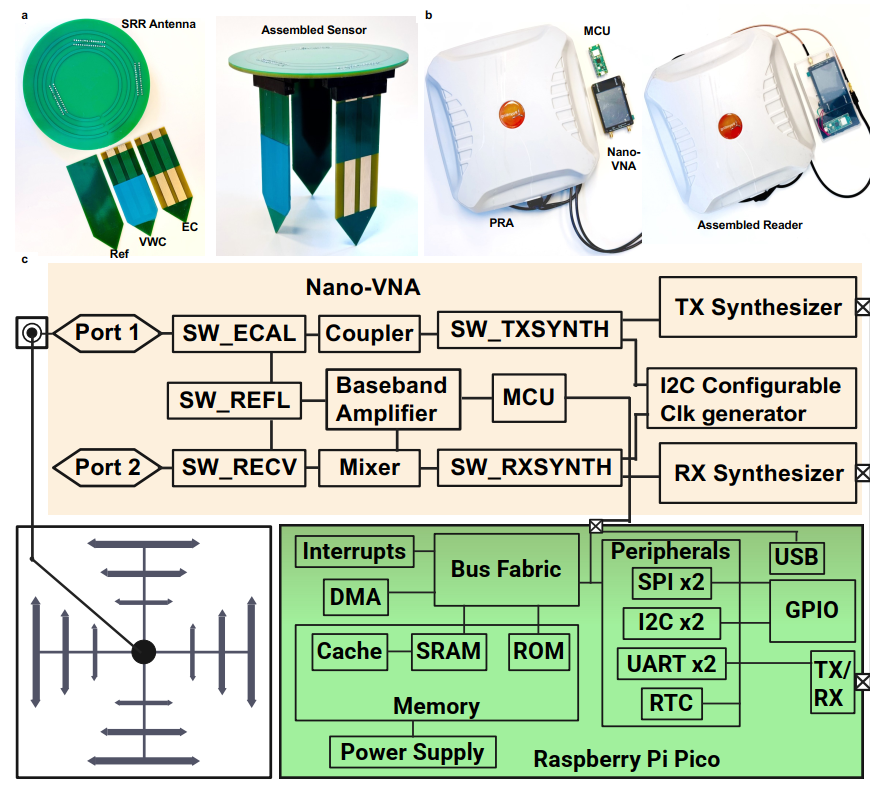 Supplementary Fig. 11 | HARVEST 传感器与读取器模块架构
Supplementary Fig. 11 | HARVEST 传感器与读取器模块架构
a) HARVEST 传感器拆解和完全组装状态的照片,展示钉状传感探头与三重开口环谐振器天线的模块化集成。b) 定制便携式读取器模块的内部组件(拆解状态)和最终组装形态的图示。c) 便携式读取器模块的电子架构示意图,突出核心组件及与便携式读取器天线(PRA)的接口,用于田间可部署射频探测。
便携式读取器模块开发与实现
将读取系统定制为紧凑、模块化、轻便且兼容无人机的单元,用于对制造的设备进行无线测量。定制读取器模块采用模块化设计,集成了树莓派 Pico W 微控制器单元,并连接到便携式纳米矢量网络分析仪(NanoVNA-H,Seesii)。纳米矢量网络分析仪是一种双端口传输和反射矢量网络分析仪,包含射频信号发生器、定向耦合器和射频接收器。它使用三个不同的信号发生器:用于高达 140 MHz 低频操作的 SI5351,以及两个用于将频率范围扩展至 1500 MHz 的 ADF4350 射频合成器,最大射频输出功率为 + 10 dBm。射频接收器链包括一个 AD8342 混频器和一个基带放大器,将射频信号下变频至约 12 kHz 的中频(IF)。该中频信号通过 GD32 微控制器中集成的 12 位模数转换器(ADC)数字化,固件精确计算信号的相位和幅度,确保在宽频率范围内的准确频谱分析。纳米矢量网络分析仪连接到安装在无人机底部的 XPOL V2 便携式读取器天线。XPOL V2 天线提供 617-4200 MHz 的宽带覆盖,峰值增益约为 11 dBi,具有 2×2 MIMO 天线,半功率波束宽度接近 35°,并带有两个交叉极化端口,封装在坚固的 IP65 级外壳中,适用于户外和空中部署。
数据采集方面,纳米矢量网络分析仪与树莓派 Pico W 连接,后者负责收集反向散射信号的谐振特性,并将其无线传输至云数据库(有关数据采集过程以及将频谱响应转换为地下土壤体积含水量和电导率值的更多细节,请参见补充材料说明 7 和补充材料图 12)。树莓派 Pico W 提供了一种紧凑、经济高效的平台,功耗低、双核实时处理能力强,且无缝支持 MicroPython,非常适合可靠的无线数据采集。其内置的英飞凌 CYW43439 无线芯片支持 Wi-Fi 4(802.11n)无线网络。两个 ADF4350 射频合成器与树莓派 Pico W 的 TX 和 RX 引脚接口,通过 I2C 协议实现通信。树莓派 Pico W 和纳米矢量网络分析仪组装封装后,牢固安装在无人机顶部,确保飞行和悬停期间的稳定性。
补充说明 7:读取器模块 ------ 下游数据处理
补充图 12 所示流程图概述了基于射频反向散射的地下土壤传感实时嵌入式流程:树莓派 Pico W 通过 UART 与纳米矢量网络分析仪(NanoVNA)接口,触发频率扫描并采集原始 S₁₁数据;本地解析和预处理数据以提取谐振特征;利用校准传递函数,通过振幅和频率指标计算土壤电导率和体积含水量;将处理后的数据格式化为 JSON 载荷,通过 Wi-Fi 以 HTTP POST 方式传输至远程云终端,实现持久日志记录和远程访问。
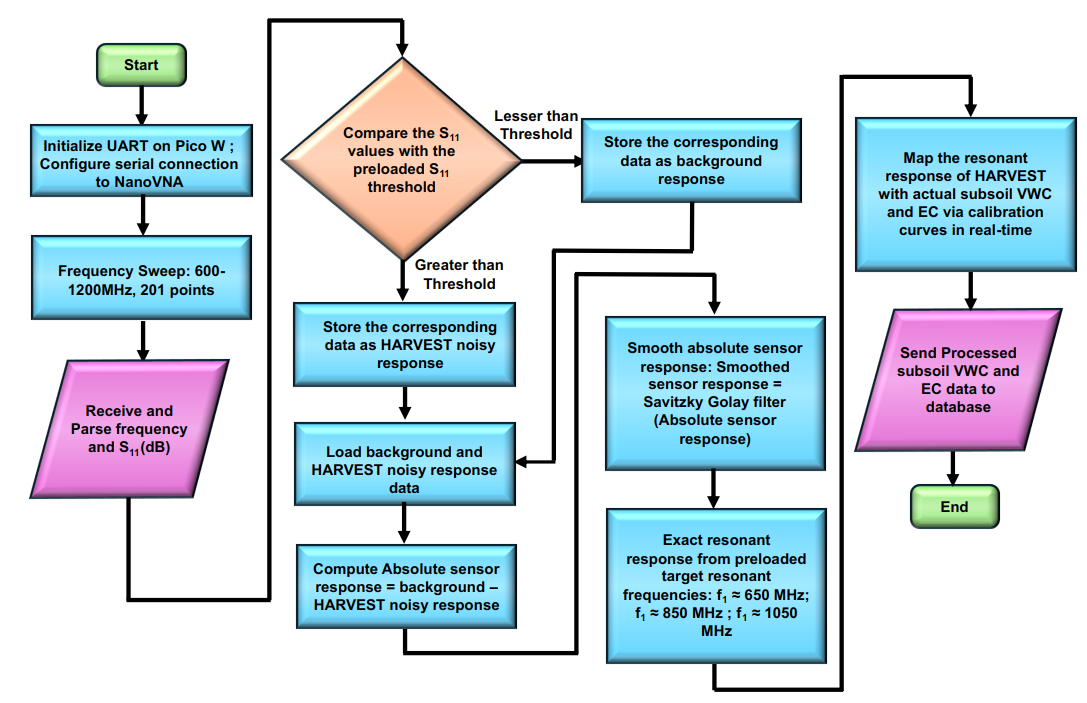 Supplementary Fig. 12 | 数据采集与传输流程
Supplementary Fig. 12 | 数据采集与传输流程
流程图展示 HARVEST 系统的完整数据处理流程。算法通过连接交叉极化(XPOL)读取器天线的纳米矢量网络分析仪(NanoVNA)启动射频频率扫描,提取体积含水量和电导率传感器通道对应的谐振峰,并利用预加载的经验校准曲线将其映射为地下土壤体积含水量和电导率值。处理后的体积含水量和电导率数据通过 Wi-Fi 无线传输至云服务器,用于远程访问和实时监测。
土壤样本制备
为验证仿真结果,在普渡大学农业研究与教育中心(ACRE)采集的土壤样本中测试了 HARVEST 传感器。采集后,将土壤研磨至颗粒均匀的质地,并分成不同部分用于体积含水量和电导率实验。首先,为测试传感器对不同体积含水量的响应而不改变土壤的天然电导率,向四部分土壤中逐步添加不同体积的去离子水(500 毫升、1000 毫升、1500 毫升和 2000 毫升)并充分混合。该过程产生了体积含水量为 10%、15%、20% 和 25% 的土壤样本,并使用商用 TEROS 12(METER Group Inc)土壤传感器进行验证。另一方面,为评估传感器在不同电导率下的性能,通过将 275 毫克盐混合物(包含氯化钠、氯化钙和氯化镁,Sigma-Aldrich,美国密苏里州圣路易斯)溶解在 500 毫升去离子水中,制备盐储备溶液。将这些溶液等体积添加到四等份土壤中(每份土壤的体积含水量几乎恒定在 5%),并充分混合以确保盐分布均匀。这产生了电导率为 0.2、0.4、0.6 和 0.8 dS/m 的土壤样本,随后使用 TEROS 12 传感器验证准确性。这种系统制备具有受控体积含水量和电导率的土壤样本的方法,创造了真实的测试条件,能够全面评估传感器检测土壤特性变化的性能。
暗室测量
在暗室中进行初始测量,以在最小电磁干扰和最佳回声抑制条件下评估 HARVEST 传感器的性能。该设置有助于更准确地比较仿真结果与所提出传感器的实验室表征结果。首先使用 ETS Lindgren 3164-10 四脊双极化喇叭天线和是德科技 E5072A 矢量网络分析仪(美国加利福尼亚州圣罗莎)测试所提出的土壤传感器的性能。实验期间,将传感器放置在土壤容器中,使钉状探头完全埋入土壤,三重开口环谐振器天线面向喇叭天线。为确定所提出传感器的最大读取距离,将喇叭天线放置在 ETS Lindgren 线性滑块上,该滑块能够从原始位置线性移动至 200 厘米。以恒定增量改变喇叭天线与土壤容器中传感器之间的距离,并在每个间隔记录传感器的 S₁₁,以确定传感器的最大读取距离。为观察传感器在不同体积含水量土壤样本中的敏感性,将传感器放置在制备的土壤样本中,并记录相应的 S₁₁。采用类似方法测量传感器对不同土壤电导率的敏感性。随后,使用连接到纳米矢量网络分析仪的 XPOL V2 便携式天线作为射频源重复整个过程,以评估定制开发的便携式读取器的有效性。通过 TEROS 12 传感器获取地面实测土壤体积含水量和电导率值:将 TEROS 12 传感器与 Arduino MKR1010 数据记录仪接口,并从同一土壤容器内的多个点记录土壤体积含水量和电导率值,以确保均匀性。然后将记录的基线值与从便携式读取器天线获得的谐振特性相关联,建立校准曲线。
田间测量
为评估无线无源土壤传感器在实际环境中的敏感性,将传感器部署在普渡大学农业研究与教育中心(ACRE)玉米田内的四个预定位置(北纬 40°28'4.95",西经 86°59'10.42";北纬 40°28'13.06",西经 86°59'42.29";北纬 40°28'13.05",西经 86°59'42.21";北纬 40°28'12.99",西经 86°59'42.20")。部署传感器前,使用 TEROS12 传感器测量土壤体积含水量和电导率值,建立地面实测基线数据:将 TEROS 12 传感器与 Arduino MKR1010 数据记录仪接口,并从传感器部署点周围的多个点记录土壤体积含水量和电导率值。然后将传感器插入土壤,确保钉状探头完全埋入,同时天线朝上。将便携式天线通过固定在其起落架之间的方式安装在无人机底部,连接到天线并封装在丙烯酸盒中的微控制器单元和纳米矢量网络分析仪放置在无人机顶部,以减少湍流引起的噪声。无人机载读取器在四个位置的每个传感器上方飞行,平均持续 10 秒,并记录每个传感器的反射特性。在整个玉米作物生长周期的大部分时间内采集该数据,以确保无线无源土壤传感器的一致性、可靠性,并强调其实际适用性。