doi:https://doi.org/10.1016/j.compag.2024.109801
通讯作者:曾荣
摘要:
土壤颜色是土壤组成与固有属性的综合表征指标,可用于预测土壤相关属性。近地传感技术在土壤颜色识别中的应用效果,不仅因测色方法不同而存在差异,同一方法内的测量结果也可能有所不同。此外,多种色彩空间模型均可用于颜色的定量化表征,这也引发了一系列问题:不同色彩空间下各类土壤测色方法的测量结果存在何种差异?基于不同测色方法的土壤属性预测效果如何?测色方法与色彩空间的最优组合是什么?为解答上述问题,本研究采集了 200 份中国土壤样本(其中贵州省 80 份、湖南省 120 份),分别采用主观目视估测、智能手机、Nix Pro2 色差仪、ASD 光谱仪 四种方法对样本颜色进行测定。以美国国家标准局(NBS)单位为计量标准,量化了 CIELa b色彩空间中不同方法间的色差(ΔEab);同时采用 RGB、HIS、CIEL ab 、CIELc h*、CIELuv * 五种色彩空间模型,对各方法测得的土壤颜色参数进行定量化表征,并将这些参数作为输入变量,预测土壤有机质(SOM)和游离铁(FI)两种与颜色密切相关的土壤属性。本研究构建了逐步多元线性回归(SMLR)、反向传播神经网络(BPNN)、偏最小二乘回归(PLSR)三种预测模型,开展土壤属性预测研究。
结果表明:Nix Pro2 色差仪与智能手机的测色结果色差最小(ΔEab=2.66 NBS),属于 "可察觉" 级别;而 ASD 光谱仪与其他三种方法的测色结果存在显著系统性差异,色差为 23.48~25.51 NBS,属于 "极显著" 级别。以 ASD 光谱仪测得的可见光光谱为输入的 PLSR 模型作为基准模型,其他传感方法结合不同预测模型对土壤有机质的预测性能四分位距比(RPIQ)为 2.90~3.43,对游离铁的预测 RPIQ 为 3.07~3.93。不同测色方法的预测性能差异显著:土壤有机质预测性能排序为Nix Pro2 色差仪 > 智能手机 > ASD 光谱仪 > 主观目视估测 ,模型性能排序为PLSR>BPNN>SMLR ;游离铁预测性能排序为智能手机 > Nix Pro2 色差仪 > ASD 光谱仪 > 主观目视估测 ,模型性能排序为PLSR>SMLR>BPNN。本研究建议,土壤有机质预测优先选用与亮度相关的颜色参数(R、h*、L*),游离铁预测优先选用与黄、红色调相关的参数(S、b*);Nix Pro2 色差仪和智能手机作为便携式、高性价比的仪器,可推荐用于近地土壤传感研究。
1 引言
土壤颜色与多项土壤理化性质密切相关,是土壤发生学与分类学研究中的重要指标 (Barron and Torrent, 1986; Schwertmann, 1993)。土壤有机质、氧化铁等部分属性可通过土壤颜色进行预测,该方法相比实验室分析更省时、低成本,能够实现土壤属性的田间快速测定,满足精准农业对大量土壤属性数据的需求。
目前土壤颜色的测定方法多样,传统方法为通过孟塞尔色卡进行主观目视估测,该体系采用色相(H)、明度(V)、彩度(C)三个正交指标对土壤颜色进行定量化表征 (Munsell Color, 1975)。客观测色方法则需借助近地数字传感设备,包括色差仪 (Rabenhorst et al., 2015)、光谱仪、数码相机 (Levin et al., 2005) 和智能手机 (Gómez-Robledo et al., 2013) 等。各类数字传感设备的输出数据需通过专属软件处理,才能转换为不同色彩空间的颜色参数。已有研究对 Nix 色差传感器的适用性进行了评价 (Stiglitz et al., 2016),该传感器仅能测定少数宽波段的吸光度或透射率;而光谱仪可测定包括全可见光波段在内的多个窄波段波长,能更细致地表征土壤颜色,但这类仪器成本较高、操作要求严苛,难以普及应用 (Islam et al., 2004)。智能手机因厂商默认的图像优化功能,其测色过程需严格遵循标准化操作;目前针对不同测色方法的对比研究仍较为有限,仅有 Fan 等 (2017) 对比了智能手机相机与孟塞尔色卡目视估测的土壤颜色测定结果。
土壤颜色测定结果易受土壤临时状态(尤其是含水量)和环境条件(光照、观测角度)的显著影响 (Gómez-Robledo et al., 2013)。在常规土壤调查中,需分别测定田间干燥和湿润状态下的土壤颜色,且为保证光照均一,常将样本带回实验室在已知光照条件下完成测定。土壤自身属性(尤其是颗粒粒径分布)也会影响测色结果 (Shields et al., 1968)。主观目视估测具有固有主观性,观测者的颜色感知能力、与标准色卡的比对方式存在个体差异,均会导致测色结果不同 (Post et al., 2006)。不同仪器的颜色识别系统误差可通过色卡校准修正,但校准方法的差异会对结果产生显著影响 (Yang et al., 2024)。
为解决上述问题,Gómez-Robledo 等 (2013) 在严格控制外部条件的前提下,采用智能手机拍摄土壤样本,但该方法不适用于田间实际测色;Gorthi 等 (2021) 和 Swetha 等 (2020) 利用黑箱装置控制光照条件,该装置结构简单、便于携带且操作简便;Nix 色差仪的测色原理与黑箱类似,均采用内置光源进行测色。
土壤颜色可用于快速估测土壤氮、氧化铁、土壤有机质等多项属性 (Mikhailova et al., 2017; Viscarra Rossel et al., 2008)。氧化铁和有机质是影响土壤颜色的两大核心组分 (Krishna Murti and Satyanarayana, 1971; Schulze et al., 1993),因此基于土壤颜色对这两种属性的预测精度高于其他土壤属性 (Viscarra Rossel et al., 2010)。一般而言,土壤颜色越深,有机质含量越高;土壤偏红色调,氧化铁含量越高。
已有学者将智能手机作为颜色传感器进行土壤颜色识别,并基于测得的颜色参数预测土壤有机质含量 (Yang et al., 2021);Swetha 和 Chakraborty (2021) 利用 Nix Pro 色差传感器成功实现了土壤有机碳的预测;可见光 - 近红外(VNIR)光谱技术通过分析土壤表面的可见光 - 近红外反射光谱,整合土壤属性的信号特征,预测精度更高 (Angelopoulou et al., 2019);Lin 等 (2021) 基于光谱仪提取的可见光波段 RGB 颜色参数,构建了土壤有机质预测模型;Swetha 等学者通过结合不同测色方法或已知土壤属性(如土壤质地),提升了土壤有机碳的预测精度 (Swetha and Chakraborty, 2021; Swetha et al., 2022)。
色彩空间模型的选择对土壤属性预测结果具有显著影响:Viscarra Rossel 等 (2006) 发现 CIELch * 模型的预测效果略优于其他模型;Baumann 等 (2016) 则结合多种色彩空间模型开展土壤属性预测研究。
上述研究表明,色彩空间模型和预测模型的选择均会影响基于土壤颜色的属性预测效果,但目前针对不同测色方法、色彩空间、预测模型的综合对比研究,以及三者的最优组合探索仍较为缺乏 (Lin et al., 2021; Swetha et al., 2022)。本研究以主观目视估测、智能手机、Nix Pro2 色差仪、ASD 光谱仪四种测色方法为研究对象,对比分析其对 200 份不同颜色土壤样本的测定结果,并基于测得的颜色参数构建模型预测土壤有机质和游离铁含量。本研究的研究目标为:(1)量化主观目视估测中观测者个体差异对土壤颜色测定结果的影响;(2)对比主观目视估测、智能手机、Nix Pro2 色差仪、ASD 光谱仪四种方法的土壤颜色测定结果;(3)对比基于四种测色方法的土壤有机质、游离铁颜色预测模型效果;(4)分析影响土壤颜色测定结果和预测模型性能的关键因素,并针对不同应用场景提出测色方法的选用建议。
2 材料与方法
2.1 研究区与土壤样本数据集
本研究选取 200 份颜色和属性具有代表性的土壤样本,其中 120 份采自湖南省土壤剖面 0~120 cm 土层(北纬 25°08′~26°34′,东经 112°16′~113°51′),80 份采自贵州省某 100~200 英亩农田表层土壤(北纬 26°50′,东经 104°51′)(Fig.1)。研究区土地利用类型包括水田和旱地,气候类型为亚热带季风气候;依据美国农业部(USDA)土壤质地三角图,样本土壤质地涵盖壤土、粉壤土、砂壤土、砂质粘壤土、粘土、粉质粘土、粘壤土。
将土壤样本过 60 目筛后,均分为两份(每份约 100 g):一份采用实验室标准方法测定土壤理化性质,其中土壤有机质含量通过外热式重铬酸钾氧化比色法测定 (Zhang and Gong, 2012),游离铁含量通过电感耦合等离子体原子发射光谱法(ICP-AES)测定 (Zhang and Gong, 2012),上述方法均为中国土壤属性测定的标准方法;对 120 份湖南样本同时测定有机质和游离铁含量,对 80 份贵州样本仅测定有机质含量。另一份样本用于土壤颜色测定,将其装入直径 90 mm、高度 14 mm 的透明培养皿中,保证样本表面平整、均一。采用下述四种方法对土壤样本颜色进行测定。
2.2 不同方法的土壤颜色识别
2.2.1 基于孟塞尔色卡的主观目视测定
5 名观测者(观测者 1、观测者 2 等)统一接受孟塞尔色卡使用培训(孟塞尔色卡售价 299 美元),在相同光照条件下,独立将 200 份土壤样本与孟塞尔色卡进行比对,确定土壤颜色的孟塞尔指标(H、V、S)。利用 R 语言 "aqp"(定量土壤学算法)包 v2.1 中的 "munsell2rgb" 函数 (Beaudette et al., 2013),将孟塞尔颜色指标转换为 RGB 色彩空间参数,该函数包含常见土壤颜色在两种色彩空间中的对照表。
2.2.2 基于 Nix Pro2 色差仪的土壤颜色测定
Nix Pro2 色差仪(专业颜色传感器,加拿大 Nix Sensor 有限公司)是一款低成本、快速测色仪器(售价 375.49 美元),最初设计用于涂料、纺织品、家居装饰产品的颜色匹配,可输出 RGB、XYZ、CMYK、CIELa b*、CIELch * 等多种土壤色彩空间的参数。将土壤样本平铺、压实于透明培养皿中,厚度 1~2 mm,将 Nix Pro2 色差仪完全贴合土壤表面,避免外界光线进入检测区域;通过蓝牙将仪器与安装有 Nix Toolkit 安卓应用的智能手机连接,设置仪器参数:光源为 D50 标准光源、观测视角 2°、测量几何角度 45/0°(即光源与样本表面的入射角度 45°,检测器与样本表面的观测角度 0°)。该仪器的内置 LED 光源由厂商在工厂完成校准,检测前无需重新校准。每份土壤样本重复测定 3 次,取 RGB 色彩空间参数的平均值记录。
2.2.3 基于 ASD 光谱仪的土壤颜色测定
采用 ASD FieldSpec3 Hi-Res 光谱仪(2010 年售价 117000 美元)测定土壤样本在 350~2500 nm 可见光 - 近红外波段的反射光谱,在暗室中以色温 2900 K 的卤素灯为光源完成光谱测定。测定前,将光谱仪预热至少 15 min,并利用硫酸钡漫反射标准板(英国马尔文帕纳科有限公司)进行白参考校准。为提高信噪比,每份土壤样本手动采集 20 条光谱并取平均值。依据 Viscarra Rossel 等 (2009) 的方法,从可见光波段测定结果中提取 RGB 参数:分别计算红光(600~690 nm)、绿光(520~600 nm)、蓝光(450~520 nm)波段的平均反射率,再乘以 255 得到 RGB 参数。
2.2.4 基于智能手机的土壤颜色测定
2.2.4.1 图像采集
采用荣耀 50 智能手机(售价 329 美元),在自制黑箱装置(19 cm×19 cm×10 cm)内完成土壤样本图像采集 (Fig.2)。黑箱内置 LED 灯带,保证光照稳定(色温 6000 K),内部涂黑以减少光线散射;光线入射土壤表面的角度约 45°,将装有土壤样本的培养皿置于图像中心位置;将智能手机固定在黑箱上方,镜头与样本表面的距离为 8 cm。相机调至专业模式,关闭所有相机内置的图像处理和色彩调整功能,设置拍摄参数:快门速度 1/30 s、感光度 320、曝光补偿 0、光圈 1.79、焦距 23 mm。拍摄图像为 2928×3904 像素,以 JPEG 标准压缩格式保存;同时在黑箱内拍摄新孟塞尔色卡 9 个不同色相页面的图像,用于后续图像处理中的颜色校正。
2.2.4.2 感兴趣区域(ROI)选取
在采集的图像中选取合适的感兴趣区域(ROI)是土壤颜色提取的关键步骤,可避免阴影影响并保证选取区域的均一性 (Fig.3)。感兴趣区域的选取规则为:(1)将土壤样本图像从培养皿中心裁剪为 800×800 像素;(2)将孟塞尔色卡图像从中心裁剪为 200×200 像素 (Fu et al., 2020)。
2.2.4.3 颜色提取
利用 R 语言 4.3.0 中的 "countcolors" 包 v0.9.1,对感兴趣区域内的像素点进行 RGB 坐标三维散点图绘制,采用 K 均值聚类法对像素点进行聚类,将聚类中心作为图像的颜色坐标。
2.2.4.4 基于孟塞尔色卡的颜色校正
受相机设置、光照条件等因素影响,智能手机拍摄的图像可能无法真实还原土壤样本的颜色,利用孟塞尔色卡进行颜色校正可缓解该问题。通过对比孟塞尔色卡的标准颜色与拍摄图像中的色卡颜色,校准多元线性模型,对 RGB 色彩空间的颜色参数进行校正,校正公式如下:Y=Xβ+b(1)式中,Y 为校正后的 RGB 颜色参数矩阵(m×3,m 为色卡页面数);X 为输入的 RGB 颜色参数矩阵(m×3);β 为模型系数矩阵(3×3);b 为截距项(1×3)。通过该公式,本研究对 200 份土壤样本图像的颜色校正效果良好(R²=0.95~0.98)。
2.3 色彩空间转换与色差对比
RGB 是应用最广泛的色彩空间模型,主要用于电子显示技术和数字摄影领域;其他色彩空间模型可提供更丰富的衍生颜色参数。因此,将四种测色方法得到的土壤 RGB 参数转换为 HIS、CIELa b*、CIELc h*、CIELu v * 四种色彩空间参数 (Barron and Torrent, 1986; Viscarra Rossel et al., 2006),最终每份样本得到 13 个颜色空间参数。表 1为五种色彩空间模型的颜色参数说明,转换过程通过 Python3.9 依据表 1 中的定义完成。
与 RGB 色彩空间相比,CIELa b色彩空间更贴合人类的视觉颜色感知,更适用于色差分级。该色彩空间通过三个参数定义颜色:L 为明度,表征从黑色(0)到白色(100)的亮度变化;a和 b 为色度坐标,分别表征红 - 绿(+a为红色,-a 为绿色)和黄 - 蓝(+b为黄色,-b 为蓝色)的色彩变化,色度坐标的取值范围为 - 127~+128。CIELa b色彩空间中的色差 ΔEab 为两种颜色坐标间的欧氏距离 (Cheung and Rhodes, 2020),计算公式如下 (Robertson, 1977): ΔEab=(ΔL∗)2+(Δa∗)2+(Δb∗)2(2) 式中,ΔL 为明度差,Δa为红度差,Δb为黄度差。
以美国国家标准局(NBS)单位表征色差 ΔEab,依据下述公式将 ΔEab 转换为 NBS 单位 (Nagakura et al., 2018):NBSunits=ΔEab×0.92(3)
表 2为 NBS 单位对应的土壤颜色感知差异等级 (Nagakura et al., 2018)。Fang 等 (2000) 对比 NBS 体系与孟塞尔体系的相邻等级色差发现,1 个 NBS 单位约等于 0.1 个孟塞尔明度单位、0.15 个孟塞尔彩度单位、2.5 个孟塞尔色相单位(彩度为 1 时)。因此,孟塞尔色卡中相邻颜色的色差约为 10 个 NBS 单位(表 2 中 "显著" 级别),本研究将该值作为主观目视估测的可接受色差范围。以 7.5YR7/4 为例,其与孟塞尔色卡中 7.5YR8/4(下方)、7.5YR7/2(左侧)、7.5YR5/4(上方)、7.5YR7/6(右侧)的色差 ΔEab 分别为 9.01、11.50、18.51、11.33 NBS。
2.4 模型构建与评价
基于五种色彩空间模型(RGB、HIS、CIELa b*、CIELc h*、CIELuv*)的颜色参数,构建逐步多元线性回归(SMLR)、反向传播神经网络(BPNN)、偏最小二乘回归(PLSR)三种模型,预测土壤有机质和游离铁含量 (Fig.4);其中,颜色参数由四种测色方法获得(5 名观测者主观目视估测的平均值、智能手机、Nix Pro2 色差仪、ASD 光谱仪)。以可见光波段(380~780 nm)的光谱数据为输入,构建 PLSR 模型作为基准模型。采用 ** 留一交叉验证(LOOCV)** 方法将样本集划分为训练集和验证集,对比模型性能;该方法以 N 份样本为研究对象,每次选取 1 份作为验证集,剩余 N-1 份作为训练集,确保每份样本均参与模型验证。
2.4.1 逐步多元线性回归(SMLR)
逐步多元线性回归依据统计准则逐次筛选变量,构建因变量预测模型,本研究通过 R 语言 4.3.0 实现;设置变量引入的显著性水平 p=0.05、变量剔除的显著性水平 p=0.1,保留显著性水平在 0.05~0.1 之间的变量。
2.4.2 反向传播神经网络(BPNN)
反向传播神经网络通过迭代调整互联节点的权重,学习复杂的变量间规律 (Rumelhart et al., 1986),本研究通过 MATLAB R2022a 软件实现。该模型包含输入层、隐藏层、输出层:输入层为 13 个神经元,对应 13 个颜色空间输入参数;输出层为 1 个神经元,对应土壤有机质或游离铁单一预测属性。隐藏层的神经元数量通过经验公式确定:M=(m+n)1/2+a(4)式中,m 为输入层神经元数量,n 为输出层神经元数量,a 为 0~10 之间的任意常数。
采用贝叶斯正则化法,通过最小化均方误差(MSE)确定隐藏层的最优神经元数量;隐藏层的传递函数为双曲正切 S 型函数(tansig),输出层为纯线性函数(purelin)。土壤有机质和游离铁预测模型的训练参数设置为:训练步数 1000、目标误差 0.001、学习率 0.01。
2.4.3 偏最小二乘回归(PLSR)
偏最小二乘回归通过识别潜因子,捕捉自变量与因变量间的最大协方差,适用于高维、多重共线性的数据集 (Wold et al., 2001),本研究通过 R 语言 4.3.0 中的 "pls" 包 v2.8-5 实现。采用留一交叉验证法,通过最小化均方根误差(RMSE)确定最优变量,颜色参数预测的变量搜索范围为 13,可见光光谱预测的变量搜索范围为 30。
2.4.4 模型性能评价
采用决定系数(R²)、均方根误差(RMSE)、性能四分位距比(RPIQ)、偏差(bias)四个指标评价模型性能,计算公式如下:R2=1−∑i=1n(yi−y)2∑i=1n(yi−y^i)2(5)RMSE=n1∑i=1n(yi−y^i)2(6)RPIQ=RMSEQ3−Q1(7)bias=n1∑i=1n(y^i−y)(8)式中,yi为实测值,yi为预测值,yˉ为实测值的平均值,n 为样本数量,Q1为下四分位数(25% 分位数),Q3为上四分位数(75% 分位数)。R2和 RPIQ 越大、RMSE 越小,表明模型的拟合效果越好、预测精度越高。性能四分位距比(RPIQ)以实测数据的半变异程度(四分位距 IQR)为分子,以预测误差(RMSE)为分母,无需假设数据分布特征,为无量纲指标;例如,RPIQ=2 表示模型的均方根误差为四分位距的 1/2。
3 结果
3.1 土壤属性
表 3为土壤有机质和游离铁含量的描述性统计结果,两种属性的取值范围广、变异程度大,适合作为预测模型的研究对象;其中土壤有机质呈负偏态分布,游离铁呈轻微正偏态分布。
注:n 为样本数量,SD 为标准差,CV 为变异系数(%),Q1为下四分位数(25% 分位数),Q3为上四分位数(75% 分位数)。
3.2 颜色测量结果
200 份土壤样本的孟塞尔色相从偏黄到偏红依次为 2.5Y、10YR、7.5YR、5YR,为排水良好土壤的常见色相范围;研究样本中无极黄色(5Y)、极红色(2.5YR、10R、7.5YR)土壤,也无潜育土。
智能手机测色的颜色校正模型拟合优度 R² 为 0.95~0.98,校正效果良好。
图 5 为四种测色方法在 CIELa b色彩空间中颜色参数的箱线图,各参数的取值范围均较广,除 b 外,其余参数的四分位距均较大。所有样本的 a和 b 均为正值,表明土壤颜色均偏黄、红色调,与孟塞尔色相的分析结果一致。各颜色参数的平均值排序为:L*(主观目视估测 > 智能手机 > Nix Pro2 色差仪 > ASD 光谱仪)、a*(智能手机 > Nix Pro2 色差仪 > 主观目视估测 > ASD 光谱仪)、b*(主观目视估测 > Nix Pro2 色差仪 > 智能手机 > ASD 光谱仪)。ASD 光谱仪测得的 L值整体较低,平均值为 26.05;而主观目视估测、智能手机、Nix Pro2 色差仪测得的 L 值平均值为 50.90~52.40,约为 ASD 光谱仪的 2 倍。ASD 光谱仪的测色结果显示,所有土壤样本的颜色均更深(L更低)、更偏绿(a更低)、更偏蓝(b * 更低),这可能与该仪器的专属光源有关。智能手机与 Nix Pro2 色差仪的测色结果无显著差异,表明二者的测定结果具有较高的相似性。
3.3 色差对比
表 4为主观目视估测的观测者个体间色差平均值,大部分观测者间的色差 ΔEab 为 6.0~12.0 NBS,平均值为 6.85 NBS,属于土壤颜色差异的 "显著" 级别,对应不超过 1 个孟塞尔色卡单位。不同观测者的测色结果存在不同程度的差异:观测者 1 与观测者 2 的差异最大(8.68 NBS),观测者 2 与观测者 3 的差异最小(4.54 NBS)。所有观测者间的色差均在可接受范围内(ΔEab<10 NBS),可为后续土壤分析提供可靠的参考数据。
表 5为四种测色方法间的色差结果,除 ASD 光谱仪外,其余方法间的平均色差 ΔEab 为 4.20 NBS。ASD 光谱仪与其他三种方法的测色结果存在显著差异,色差最大值为 25.51 NBS、最小值为 23.48 NBS;智能手机与 Nix Pro2 色差仪的测色结果最为接近,色差最小值为 266 NBS,表明二者的匹配度较高。不同测色仪器间的色差标准差为 1.04~1.82,小于主观目视估测与各仪器间的色差标准差(1.84~2.56),也小于不同观测者间的色差标准差(4.58~6.11),表明仪器间的测色差异更稳定。
3.4 颜色参数与土壤有机质、游离铁的相关性
图 6为 13 个颜色参数与土壤有机质、游离铁的皮尔逊相关系数,不同测色方法的相关关系存在差异。例如,主观目视估测、Nix Pro2 色差仪、ASD 光谱仪测得的 H、b*、c * 参数与土壤有机质呈极显著负相关(p<0.01),而智能手机测得的上述参数与土壤有机质无显著相关;主观目视估测测得的 G、L 参数与游离铁分别呈极显著(p<0.01)和显著(p<0.05)负相关,而智能手机、Nix Pro2 色差仪、ASD 光谱仪测得的上述参数与游离铁无显著相关(p>0.05)。这表明不同测色方法的颜色测定差异,会影响颜色参数与土壤有机质、游离铁的相关关系。
所有测色方法均显示:R、G、B、I、L*、u*、v参数与土壤有机质呈显著负相关,B 参数与游离铁呈显著负相关;S、a 、b*、c*、u*、v参数与游离铁呈显著正相关。其中,R、L 、I 参数与土壤有机质的皮尔逊相关系数较高,最大值分别为 - 0.832、-0.742、-0.706;S 参数与游离铁的相关系数最高,最大值为 0.817。尽管测色方法会影响部分颜色参数与土壤有机质(b*、c*、h*)、游离铁(R、G、I、L*)的相关程度,但相关关系的正负性保持一致。值得注意的是,智能手机测得的 H、h参数与两种土壤属性的相关关系,与其他三种测色方法相反;H 和 h均为表征 0°~360° 色相的参数,这可能与智能手机的白平衡设置有关,其对色相的影响与其他三种方法存在差异。
3.5 不同测色方法的预测结果对比
基于逐步多元线性回归(SMLR)、反向传播神经网络(BPNN)和偏最小二乘回归(PLSR)构建的土壤有机质(SOM)和游离铁(FI)预测模型结果如表 6 和图 7 所示。本研究将以 ASD 光谱仪测得的可见光波段(380~780 nm)光谱数据为输入的 PLSR 模型作为基准模型,对比四种测色方法结合不同预测模型的性能。该基准模型对土壤有机质的预测精度为:R2=0.86、、RPIQ=4.14、;对游离铁的预测精度为:R2=0.86、、RPIQ=4.18、,可见该基准模型对土壤属性的方差解释能力和预测精度均处于中等水平。
基于颜色参数的土壤有机质预测模型,其性能四分位距比(RPIQ)为 2.90~3.43,略低于 Ng 等 (2022, Table 3) 利用中红外光谱预测土壤有机质的结果。其中,Nix Pro2 色差仪结合 PLSR 模型的预测效果最优,相关指标为R2=0.79、、RPIQ=3.43;而主观目视估测结合 SMLR 模型的预测效果最差,指标为R2=0.71、、RPIQ=2.90。各方法间的预测精度差异并不显著,说明基于不同测色方法获取的颜色参数,均能对土壤有机质做出较为合理的预测。不同建模算法对土壤有机质的预测性能排序为:PLSR > BPNN > SMLR。Nix Pro2 色差仪在所有建模算法中均表现最优或效果良好;ASD 光谱仪在 BPNN 模型中预测效果最差,但在 PLSR 模型中表现较佳。整体而言,土壤有机质预测的最优测色方法为 Nix Pro2 色差仪,其次为智能手机。
基于颜色参数的游离铁预测模型,其 RPIQ 为 3.07~3.93,约为 Ng 等 (2022, Tables 2 and 7) 利用中红外光谱预测不同形态铁含量结果的两倍,即本研究模型的预测效果更优。其中,智能手机结合 PLSR 模型、Nix Pro2 色差仪结合 PLSR 模型的预测效果相近且均为最优,RPIQ 分别达 3.87 和 3.93;而主观目视估测结合 BPNN 模型的预测效果最差,指标为R2=0.73、、RPIQ=3.07。不同建模算法对游离铁的预测性能排序为:PLSR > SMLR > BPNN。Nix Pro2 色差仪在 BPNN 模型中表现较差,但在 PLSR 模型中预测效果最优;主观目视估测在所有建模算法中均表现中等或较差。整体而言,游离铁预测的最优测色方法为智能手机,其次为 Nix Pro2 色差仪。
Nix Pro2 色差仪结合 PLSR 模型是土壤有机质和游离铁预测的最优组合,其预测效果与以可见光光谱为输入的基准 PLSR 模型相近,这表明 Nix Pro2 色差仪对与颜色相关的土壤属性具有优异的预测能力,是一种极具应用前景且操作便捷的测色工具。
3.6 土壤有机质和游离铁预测的关键颜色参数
为探究土壤有机质和游离铁预测的关键颜色参数,本研究对比了逐步多元线性回归(SMLR)模型中筛选出的输入变量,结果发现:R 和h∗是土壤有机质预测中最常被选用的参数,而 S、b∗、R 和 B 则是游离铁预测的核心参数,红度相关参数 R 在两种属性的预测中均发挥重要作用。令人意外的是,明度参数 L 并未成为核心预测参数。
主观目视估测、智能手机和 Nix Pro2 色差仪构建的土壤有机质 SMLR 模型,均将 R 和h∗作为自变量;而主观目视估测和智能手机的游离铁 SMLR 模型,则均选用b∗、R 和 B 作为核心参数,红度参数 R 再次成为关键指标,这对于游离铁预测而言符合预期规律。部分颜色参数对土壤属性预测的重要性,并不会随测色方法的改变而发生变化。
4 讨论
4.1 不同方法土壤颜色识别结果的对比分析
主观目视估测法的测色结果存在显著的观测者个体差异。除个别情况外(如观测者 2 与观测者 3,ΔEab=4.54 NBS),大部分观测者间的测色差异约为 1 个孟塞尔色卡单位(6.0 NBS<ΔEab<12.0 NBS),平均变异系数达 79.3%,远高于除 ASD 光谱仪外其他测色方法间的平均变异系数(40.2%)。该结果与 Sellitto 等 (2007) 的研究结论一致,其研究中孟塞尔色卡目视估测结果的变异系数(42.5%)高于光谱测定结果(36.0%)。由此可见,与其他测色方法相比,主观目视估测的结果受人为主观因素影响更为显著。
主观目视估测产生的结果差异可归因于三方面原因:(1)观测者的颜色感知能力存在个体差异;(2)受环境自然光条件的影响;(3)孟塞尔色卡的色卡数量有限,难以满足高精度土壤颜色测定的需求 (Kirillova et al., 2018; Rabenhorst et al., 2015)。但色卡间的差异已接近人类的颜色感知极限,因此增加中间色卡也难以改善这一问题。此外,孟塞尔色卡的主观性和不连续性,会进一步扩大不同观测者测色结果的离散程度,这也是目视估测结果变异系数高于其他测色方法间变异系数的重要原因。
表 5 展示了不同测色方法间的色差结果,ASD 光谱仪与其他方法的测色结果存在显著差异(ΔEab>12.0 NBS),这是因为 ASD 光谱仪与其他方法的工作光源和数据处理流程存在明显不同 (Viscarra Rossel et al., 2008)。Viscarra Rossel 等 (2009) 的研究进一步指出,利用光谱仪测定土壤颜色时,土壤理化性质的微小变化也会导致可见光光谱曲线产生显著差异。其研究中,采用孟塞尔色卡与光谱分析两种方法测定同一土壤样本的颜色,平均色差ΔEab达 25.62 NBS,与本研究的结果(25.52 NBS)高度相近,这一色差问题的校正方法仍需进一步研究。
除 ASD 光谱仪外,其他测色方法间的色差均较小(ΔEab<6.0 NBS),其中智能手机与 Nix Pro2 色差仪的色差最小,为 2.66 NBS,属于土壤颜色差异的 "可察觉" 级别(1.5 NBS<ΔEab<3.0 NBS)。智能手机与 Nix Pro2 色差仪均可用于田间土壤颜色的原位测定,且对于多数观测者而言,智能手机无需额外购置,成本更低。两种方法均能实现测色环境的密闭,避免外界光线的干扰,但智能手机需要黑箱等辅助设备来消除环境光影响,而 Nix Pro2 色差仪则无需辅助设备;同时,智能手机的测色流程更为复杂,且硬件型号的差异也可能影响颜色识别结果。不过 Han 等 (2016) 对比了智能手机、商用相机和光谱仪作为颜色传感器在土壤分类中的应用效果,发现三者的结果基本一致。综合来看,Nix Pro2 色差仪和智能手机是获取一致性土壤颜色信息的优选方法,且成本合理,适合推广应用。
4.2 基于不同测色方法的土壤有机质和游离铁颜色预测模型分析
测色方法和建模算法的选择,均对土壤有机质和游离铁的预测精度产生显著影响 (Table 6 and Fig.7)。以可见光光谱为输入的 PLSR 模型为基准,其他方法对土壤有机质预测的 RPIQ 为 2.90~3.43,对游离铁预测的 RPIQ 为 3.07~3.93。其中,主观目视估测的预测效果最差,而 Nix Pro2 色差仪和智能手机的预测性能更优,这与 Baumann 等 (2016) 的研究结论一致,其利用 Nix 颜色传感器结合三种色彩空间模型预测土壤总铁含量,R2达 0.79~0.81,表现出良好的预测效果。
已有学者将 Nix 颜色传感器的测色结果与孟塞尔土壤颜色 (Swetha et al., 2022)、土壤质地 (Swetha and Chakraborty, 2021) 相结合,提升了土壤颜色相关属性的预测精度,这也证明了该低成本、高效率颜色传感器的综合表征能力。智能手机的测色结果稳定性和土壤属性预测精度均表现良好,Yang 等 (2024) 的研究中,经校准后的智能手机对土壤有机质的预测模型平均R2=0.61、,本研究的预测效果更优。相较于 Nix Pro2 色差仪,智能手机的优势在于普及率高、使用便捷;Aitkenhead 等 (2020) 将智能手机与开源开发框架 ODK 开发的程序结合,用于土壤属性预测,简化了应用开发和数据处理流程,实现了低成本、快速的土壤属性测定,但该研究仅采用 RGB 颜色参数进行预测,模型性能较差。基于本研究结果,建议将 Nix Pro2 色差仪用于土壤有机质预测,将智能手机用于游离铁预测。
本研究分别采用线性模型(SMLR、PLSR)和非线性模型(BPNN),基于颜色参数预测土壤有机质和游离铁,表 6 和图 7 的结果显示,PLSR 模型对两种属性的预测效果均优于 BPNN 和 SMLR 模型,这是因为颜色参数间存在较强的多重共线性,而 PLSR 模型可通过正交变换有效解决这一问题。本研究的部分土壤样本采自 0~120 cm 的土壤剖面,土壤有机质含量的变异性极大,范围为(Table 3);而其他相关研究的土壤样本有机质含量多呈强低偏态分布,仅有少量样本的有机质含量超过 20 g・kg⁻¹(Swetha et al., 2022; Yang et al., 2023)。本研究的样本数据分布特征更利于构建稳健的机器学习模型,因此取得了更优的预测结果。
不同测色方法构建的 SMLR 模型,其核心预测参数的选择存在差异:土壤有机质预测的核心参数在主观目视估测和智能手机模型中保持一致,而游离铁预测的核心参数则随测色方法的不同而变化。所有测色方法中,R、L*、I 与土壤有机质的相关系数均较高,S 与游离铁的相关系数也处于较高水平,除 I 外,这些参数均被选入 SMLR 模型。这表明对于本研究的土壤属性而言,部分核心颜色参数的重要性不受测色方法的影响。
这些核心参数的作用机制可得到合理解释:R 参数同时影响明度和色度,即色相(红度)和彩度(与中性色相比的色彩饱和度);L和 I 参数分别代表明度和亮度,反映土壤的反射率水平。不同测色方法测得的 I 和 L均与土壤有机质呈显著负相关,这是因为土壤有机质含量越高,其反射率越低 (Ibáñez-Asensio et al., 2013),该结果与 Viscarra Rossel 等 (2006) 的研究结论一致,其发现土壤有机碳(SOC)与多种色彩空间模型中的明度参数均存在强相关性。
氧化铁具有强烈的染色效应,使土壤剖面呈现出从棕色到红色、橙色或黄色的不同色调 (Viscarra Rossel et al., 2010),这与本研究中土壤样本的孟塞尔色相(10YR、2.5Y、7.5YR、5YR)高度吻合。其中,赤铁矿使土壤呈现红色调(5YR 及更红的色相),针铁矿则使土壤呈现黄色调(7.5YR~2.5Y)(Scheinost and Schwertmann, 1999),因此基于黄、红色调相关指标构建的游离铁预测模型具有良好的有效性。此外,Viscarra Rossel 等 (2008) 分别以 CIE v∗单颜色参数和红度指数(RI)构建土壤有机质和铁的对数预测模型,R2达 0.70~0.88,这也进一步证明,筛选核心参数能够有效提升模型的预测效率。
4.3 实际应用考量与研究局限性
本研究中,土壤样本均经过扰动并过 60 目筛,装入容器时保证表面平整、压实且无裂缝,严格、统一的样本前处理是必要的。因为土壤粗颗粒和杂质会对 Nix Pro2 色差仪的测色结果产生显著影响,且该影响无法通过系统方法校正。但在实际应用中,土壤的实际条件复杂多样,含水量、压实度和固有杂质的差异,均会对土壤颜色识别和属性预测产生显著影响。例如 Fu 等 (2020) 基于智能手机图像预测土壤有机质时发现,相较于湿润土壤(土壤含水量 > 10%),干燥土壤的预测精度更高。因此,如何在少量样本前处理(如湿润土壤、过 20 目筛土壤)的条件下,实现高精度的土壤颜色识别和相关属性预测,仍需进一步研究。
本研究未采用图像分割、空间分箱等图像处理算法,这可能会给结果带来偏差 (Gorthi et al., 2021)。Yang 等 (2023) 量化了不同土壤图像分割方法产生的颜色和纹理特征差异,发现图像分割能显著提升土壤有机质的预测精度。同时,本研究的土壤图像均以 JPEG 格式保存,而非 RAW 格式:JPEG 为有损压缩格式,能在尽量保证颜色精度和图像整体质量的前提下减小文件体积,而 RAW 为无损压缩格式,可完整保留原始图像数据。但并非所有智能手机均支持 RAW 格式,本研究使用的荣耀 50 手机即不具备该功能,JPEG 和 RAW 格式对土壤颜色识别的影响仍需深入探究。
不同测色方法之间及方法内部均存在固有差异,本研究中的颜色结果差异主要源于光照条件的不一致,但该差异对土壤属性预测的影响并不显著。如表 7 所示,每种测色方法均有其独特的优势和不足:Nix Pro2 色差仪一次测定即可输出多种色彩空间的参数,无需进行色彩空间转换,但其配套应用程序 Nix Toolkit 未包含土壤颜色描述的传统参考体系 ------ 孟塞尔色彩系统;智能手机是最便捷的测色方法,但其大规模应用需要系统、复杂的数据处理流程 (Aitkenhead et al., 2020),且测色结果受手机型号的影响 (Yang et al., 2021)。值得注意的是,大多数配备人工智能相机的智能手机会自动进行图像优化处理,因此使用智能手机测色时需格外谨慎。本研究的测色基于原始图像完成,而经不同人工智能算法处理的图像,其颜色校正方法也必然存在差异,且人工智能算法的细节属于厂商专有信息,可能会随时更新。
土壤颜色源于其对太阳可见光的选择性吸收和漫反射,因此利用光谱仪(如 ASD)进行土壤颜色测定,在原理上更具优势,对应的颜色识别和属性预测精度也更高,但该方法需要进行系统的校准操作。精准农业的发展需要全面的土壤调查,以制定适用于不同区域的精细化管理策略 (Petrović et al., 2024),而基于土壤颜色的属性预测方法,能为农户提供更快速、便捷的土壤信息获取途径,助力田间管理的科学化。在实际应用中,对预测精度的要求并非极端严苛,例如中国第二次土壤普查中,将土壤有机质划分为 6 个等级 (The National Soil Survey Office, 1998),利用便携式设备实现土壤属性的快速预测,即可为精准农业提供重要的指导和支撑。
对于土壤调查人员,建议将 Nix Pro2 色差仪作为传统孟塞尔色卡目视估测法的辅助工具,用于土壤颜色识别和属性预测。Nix Pro2 色差仪体积小、重量轻,便携性极佳,若在其配套应用程序 Nix Toolkit 中加入预测模块,即可实现土壤有机质和游离铁的实时预测。对于普通民众而言,为智能手机配备专业的测色和预测软件是最优选择 (Sinclair et al., 2024),这不仅有利于土壤科学知识的传播,还能推动公民科学在土壤学领域的发展 (Rossiter et al., 2015)。
5 结论
本研究采用主观目视估测、智能手机、Nix Pro2 色差仪和 ASD 光谱仪四种方法,开展土壤颜色识别及土壤有机质(SOM)、游离铁(FI)两种相关属性的预测研究,得出以下主要结论:
- 土壤颜色识别方面:主观目视估测的结果存在显著的观测者个体差异;Nix Pro2 色差仪与智能手机的测色结果最为接近,色差最小;ASD 光谱仪与其他三种方法的测色结果存在显著的系统性差异,色差极大。
- 土壤属性预测方面:基于颜色参数的预测模型中,Nix Pro2 色差仪和智能手机的预测性能表现优异,是低成本、便捷的近地土壤传感工具,适合实际推广应用;建模算法的优化能有效提升土壤属性预测精度,PLSR 模型对土壤有机质和游离铁的预测效果均优于 BPNN 和 SMLR 模型。本研究构建的方法体系,能够有效解答不同色彩空间下测色方法的差异、测色方法对属性预测的影响及二者最优组合的研究问题。
- 研究结果具有一定的指示意义,但仍存在局限性:本研究仅针对中国贵州、湖南两个区域的土壤样本,构建了基于土壤颜色的属性预测模型并开展对比分析,土壤样本的范围存在一定限制,例如未包含潜育土、盐渍土等具有特殊颜色的土壤类型。不同区域的土壤颜色受属性的影响规律可能存在差异,因此需要针对特定区域构建专属预测模型,或进一步探索适用于不同区域的通用预测模型。
- 近地土壤传感技术(尤其是智能手机)具有普及率高、使用便捷的优势,为土壤学领域的公民科学发展提供了契机。但要实现智能手机在土壤属性预测中的更好应用,还需解决三大问题:土壤表面不平整或扰动导致的结果偏差、智能手机镜头不稳定引发的图像畸变、图像处理流程的复杂性。未来基于土壤颜色的属性预测研究,应充分考虑土壤的实际条件(含水量、颗粒粒径、杂质等),并实现不同测色方法结果的均一化,以降低系统性误差的影响。
主要图表
**图1:**展示了本研究的采样区域及采样点位置。这些样品的土地利用类型包括稻田和旱地,采集区域属于亚热带季风气候,土壤质地涵盖壤土、粉砂壤土、砂质壤土、砂质粘壤土、粘土、粉砂粘土和粘壤土等多种类型(根据美国农业部土壤质地三角分类法)。
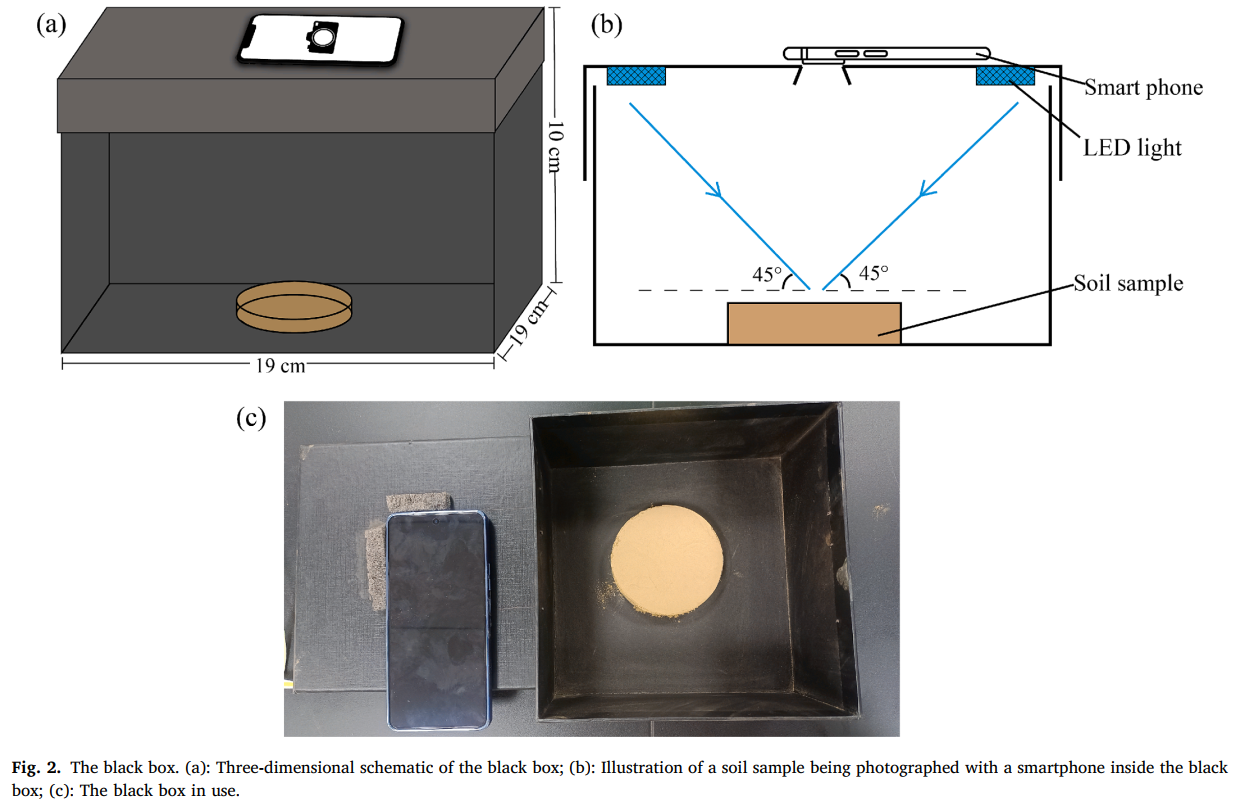
图2:展示了用于智能手机土壤颜色测量的定制黑箱装置。(a)黑箱的三维示意图,显示其内部结构和组件布局;(b)智能手机在黑箱内拍摄土壤样品的示意图,明确了光源、土壤样品和手机的相对位置;(c)实际使用中的黑箱实物图。该黑箱尺寸为 19 cm × 19 cm × 10 cm,内部安装 LED 灯带以提供稳定照明(色温 6000 K),内壁涂成黑色以减少光线散射。光源对土壤表面的入射角约为 45°,智能手机固定在黑箱上方 8 cm 处,镜头正对样品中心。拍摄时采用专业模式,禁用相机内置图像处理功能,参数设置为:快门速度 1/30 s、ISO 320、曝光值 0、光圈 F1.79、焦距 23 mm,确保图像颜色的准确性。
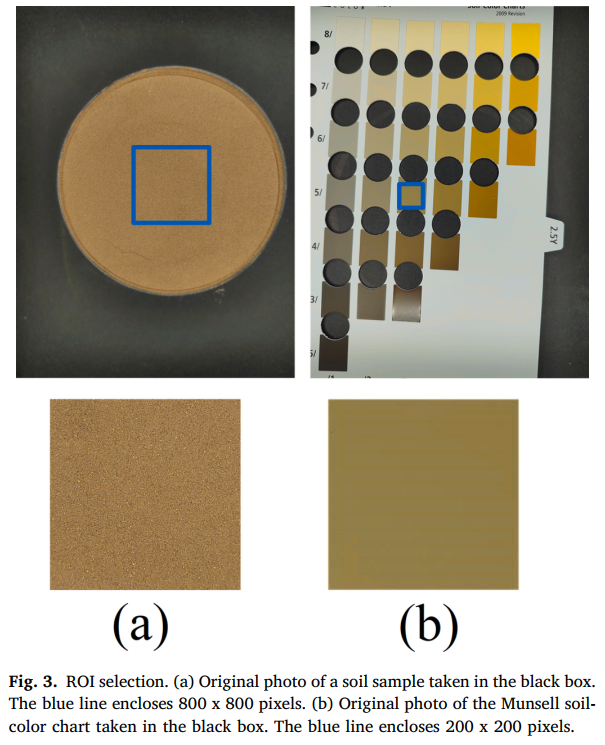
**图3:**展示了土壤颜色测量中的感兴趣区域(ROI)选取过程。(a)黑箱内拍摄的土壤样品原始照片,蓝色线框标记出 800×800 像素的中心区域,用于提取土壤颜色信息;(b)黑箱内拍摄的孟塞尔色卡原始照片,蓝色线框标记出 200×200 像素的中心区域,用于后续颜色校正。ROI 选取的目的是避免阴影干扰并保证区域均匀性。对于土壤样品,选取中心区域可减少边缘效应;对于色卡,选取中心区域确保校正参考的准确性。后续通过 R 软件的 "countcolors" 包对 ROI 内像素进行 RGB 坐标聚类分析,以聚类中心作为样品的颜色坐标
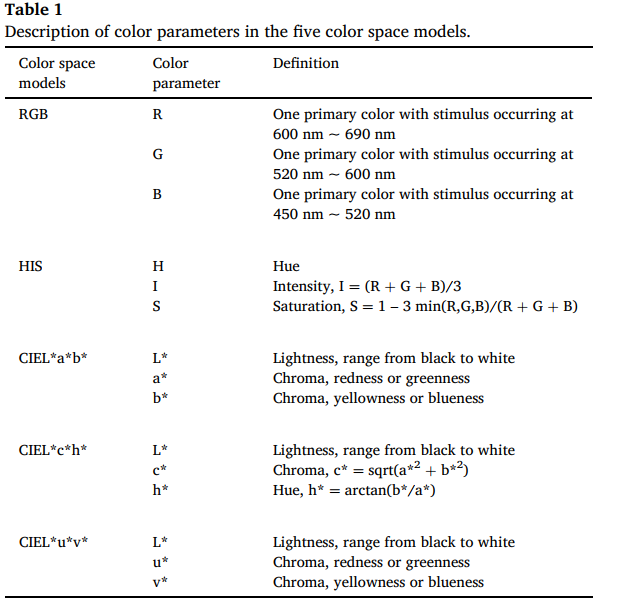
**表1:**描述了五种颜色空间模型中的颜色参数及其定义,这些模型用于量化土壤颜色特征。这些参数为后续土壤属性预测提供了多维度的颜色特征输入。
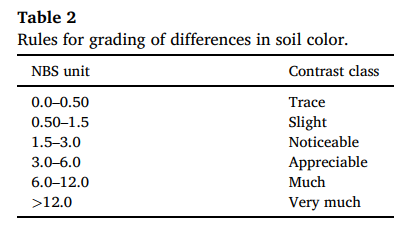
**表2:**定义了基于 NBS(National Bureau of Standard)单位的颜色差异感知等级,用于评估不同测量方法或个体间的颜色差异程度。该表为研究中不同方法的颜色差异(如 Nix Pro2 与智能手机的 ΔE=2.66 NBS 属于 "明显" 差异,ASD 与其他方法的差异属于 "极大")提供了标准化的评判标准。
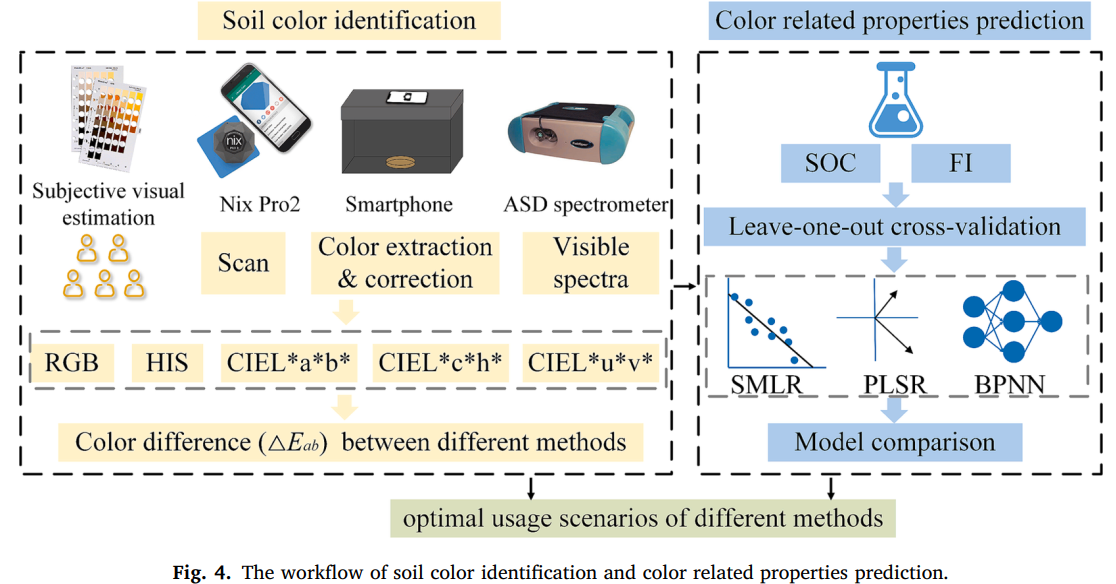
图4: 展示了土壤颜色识别与颜色相关属性预测的整体工作流程,涵盖从土壤颜色测量到模型构建与评估的完整环节。土壤颜色识别阶段 采用四种方法获取土壤颜色数据,包括主观视觉估测(基于孟塞尔色卡)、Nix Pro2 色度计扫描、智能手机拍摄与校正、ASD 光谱仪测量。所有方法的颜色数据均转换为 RGB、HIS、CIEL* a* b* 、CIEL* c* h* 、CIEL* u* v * 五种颜色空间模型的参数,共 13 个颜色参数用于后续分析。颜色差异分析 阶段,计算不同测量方法在 CIELa b * 颜色空间中的色差(ΔEₐᵦ),并转换为 NBS 单位以评估差异程度,例如 Nix Pro2 与智能手机的色差最小(2.66 NBS,属于 "明显差异"),而 ASD 与其他方法的色差显著(23.48--25.51 NBS,属于 "极大差异")。颜色相关属性预测阶段 ,以土壤有机质(SOM)和游离铁(FI)为预测目标,使用三种模型进行建模:逐步多元线性回归(SMLR)、反向传播神经网络(BPNN)和偏最小二乘回归(PLSR)。输入数据为四种测量方法获得的 13 个颜色参数,同时以 ASD 可见光谱数据构建的 PLSR 模型作为基准。通过留一法交叉验证(LOOCV)评估模型性能,指标包括决定系数(R²)、均方根误差(RMSE)、性能与四分位距比(RPIQ)和偏差(bias)。结果优化与推荐阶段,对比不同方法和模型的预测效果,确定最优组合(如 SOM 预测中 Nix Pro2+PLSR 表现最佳,FI 预测中智能手机 + PLSR 表现最佳)。

**表3:**呈现了研究中土壤样品的基本属性(土壤有机质 SOM 和游离铁 FI)的描述性统计分析结果。该表通过系统的统计描述,验证了所选样品在 SOM 和 FI 属性上的多样性,确保了后续颜色参数与土壤属性关联分析及模型构建的可靠性和代表性。注:n为样本数,SD为标准差,CV为变异系数。
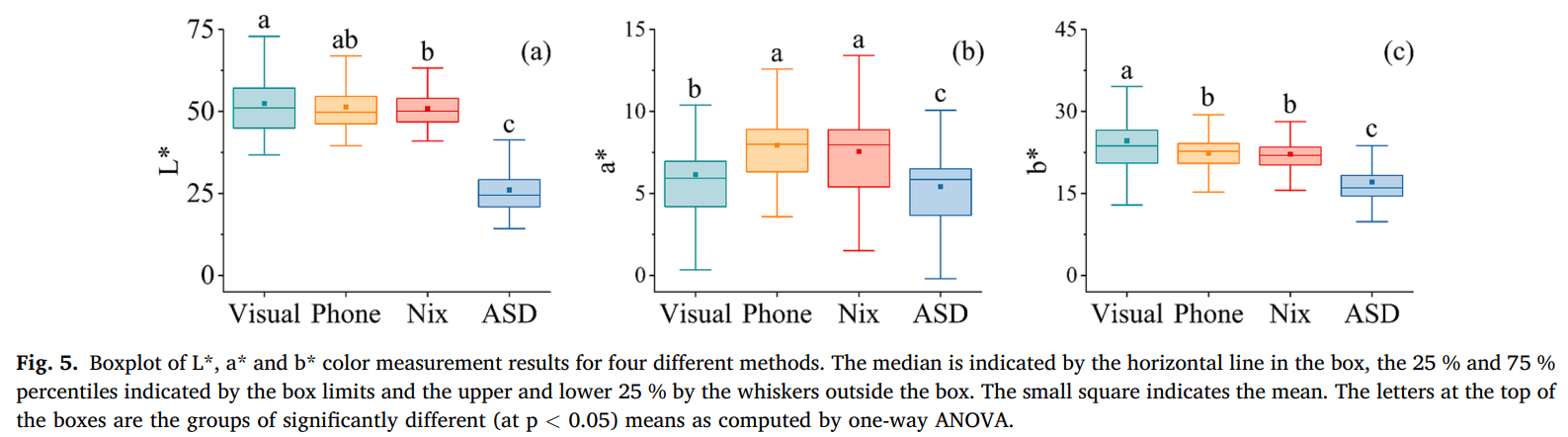
图5: 四种不同方法的L*、a*和b*颜色测量结果箱线图,直观呈现了不同方法的测量结果差异。中位数由框内的水平线表示,25%和75%的百分位数由框限表示,上下25%由框外的须表示。小方框表示平均值。方框顶部的字母是通过单因素方差分析计算的具有显著差异(p < 0.05)均值的组。箱线图显示,除 b * 外,各参数的四分位距较大,说明土壤样品颜色差异显著。智能手机与 Nix Pro2 的结果差异较小,而 ASD 与其他方法差异较大。
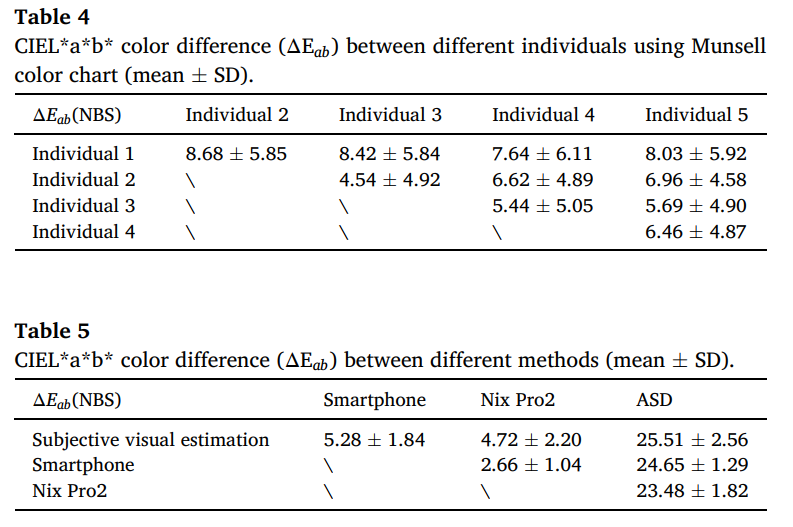
**表4、表5:**表 4 展示了五位观察者通过孟塞尔色卡进行主观视觉估测时的颜色差异。表 5 呈现了四种测量方法间的颜色差异。
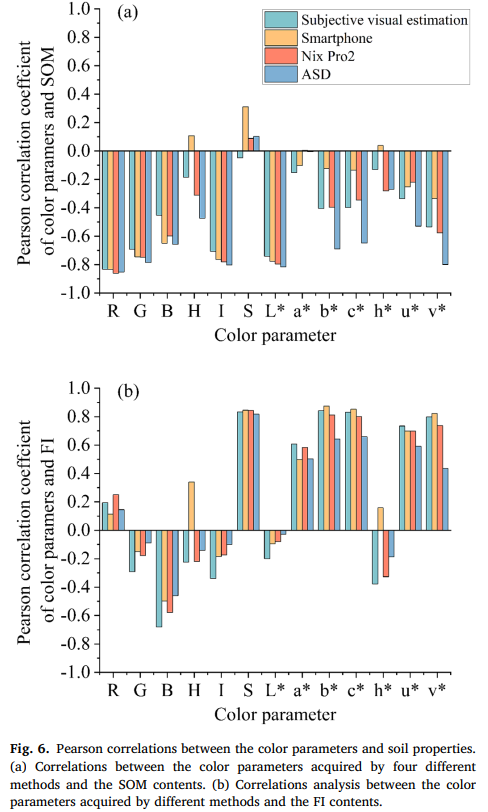
**图6:**颜色参数与土壤属性(SOM 和 FI)之间的皮尔逊相关系数图,分为两个子图,分别展示不同测量方法获取的颜色参数与 SOM、FI 的相关性。该图揭示了颜色参数与土壤属性的内在关联,为后续模型变量选择提供了依据。
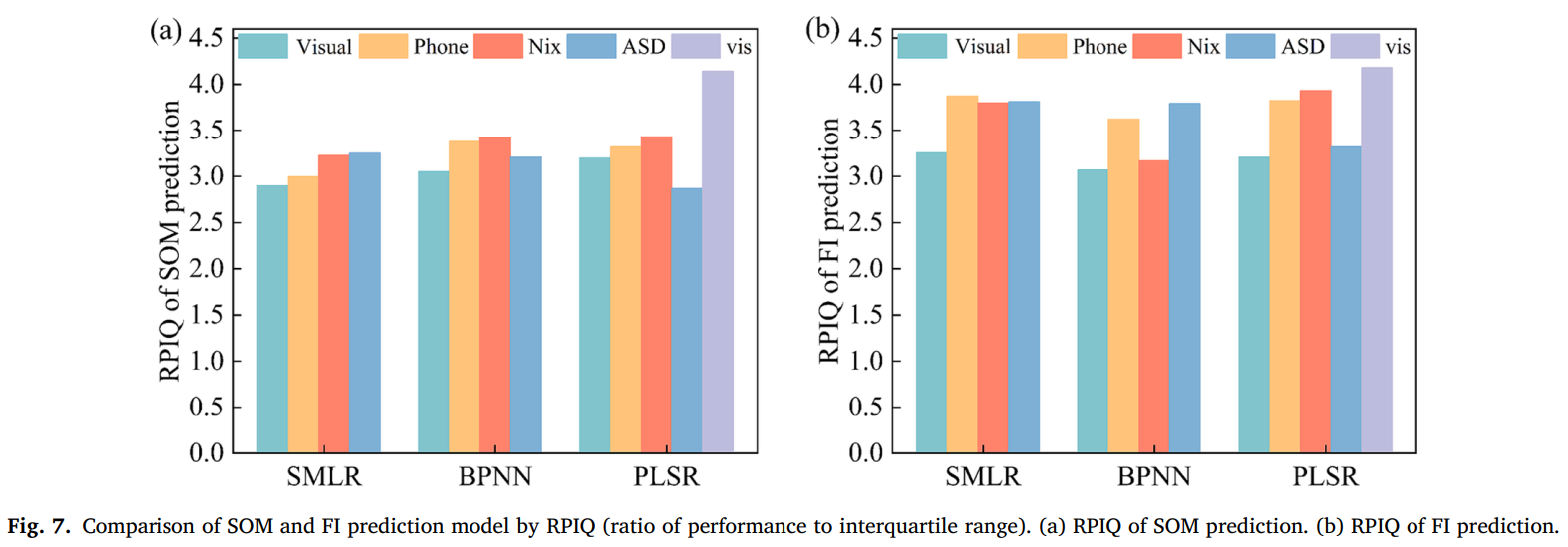
**图7:**通过柱状图对比了不同建模方法(SMLR、BPNN、PLSR)在土壤有机质(SOM)和游离铁(FI)预测中的 RPIQ(性能与四分位距比)值,RPIQ 值越高表明模型预测精度越好。图中清晰显示了不同测量方法与建模算法组合的性能差距。
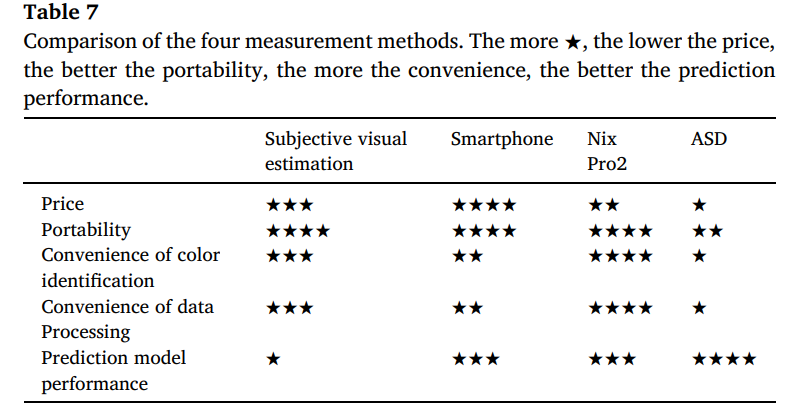
表6: 从五个维度对四种土壤颜色测量方法进行评分(★越多表示表现越好)。维度包括价格 、便携性 、颜色识别便利性 、数据处理便利性 、预测模型性能。
结论
本研究评估了四种测量方法(主观目测法、智能手机、Nix Pro2色度计和ASD光谱仪)在土壤颜色识别及相关性质(有机质SOM和游离铁FI)预测中的应用效果。在颜色识别方面,主观目测法存在个体差异;Nix Pro2与智能手机测量结果最为接近;而ASD光谱仪则表现出显著的系统性差异。在基于颜色参数的土壤性质预测方面,Nix Pro2和智能手机展现出优异的预测性能,因此作为低成本、便捷的近感土壤检测设备具有实际应用潜力。模型优选可提升性质预测效果,PLSR模型对SOM和FI的预测均优于BPNN和SMLR。本方法框架有效解答了研究提出的科学问题。
研究结果具有指示意义,但当前仅基于两个地区的土壤样本建立并比较了颜色-性质预测模型体系。受样本范围限制,本研究未涵盖潜育土、盐渍土等具有特殊颜色特征的土壤类型。考虑到不同区域土壤颜色与性质的关系可能存在差异,未来需建立区域特异性模型或探索普适性预测模型 。以智能手机为代表的近感检测技术凭借普及性和易用性优势,为公众参与土壤科学研究提供了契机。但为实现智能手机在土壤性质预测中的更好应用,仍需解决以下问题:(a)表面不平整或干扰导致的测量偏差;(b)手机镜头不稳定引起的图像畸变;(c)图像处理的复杂性。 未来基于土壤颜色的预测研究应考虑土壤湿度、粒径、杂质等状态差异,并统一不同方法的颜色测量标准以降低系统误差。