硬件
海康
接线
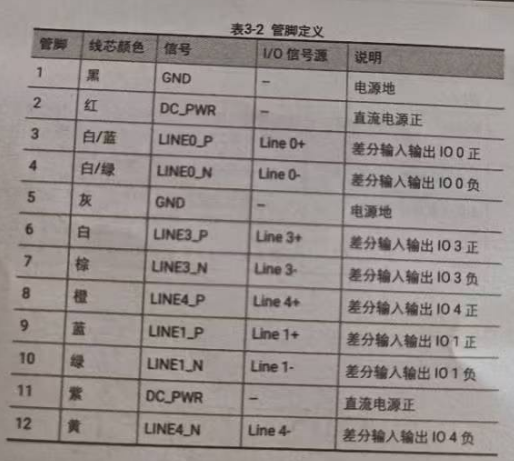
1、管脚定义
2、IO帧触发接线
3、行触发接线
编码器(行信号):参考差分信号接法
A+ A- 接line0﹢ line0﹣;
B+ B- 接line1﹢ line1﹣
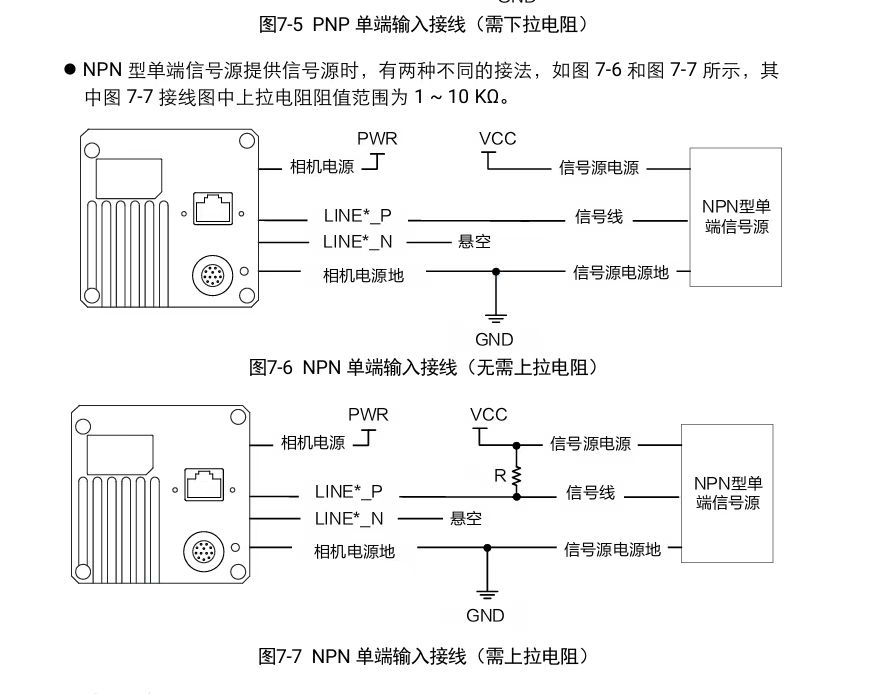
PLC(帧信号):先确认PLC给的信号是PNP还是NPN,对应接;
接line3
埃科
软件设置
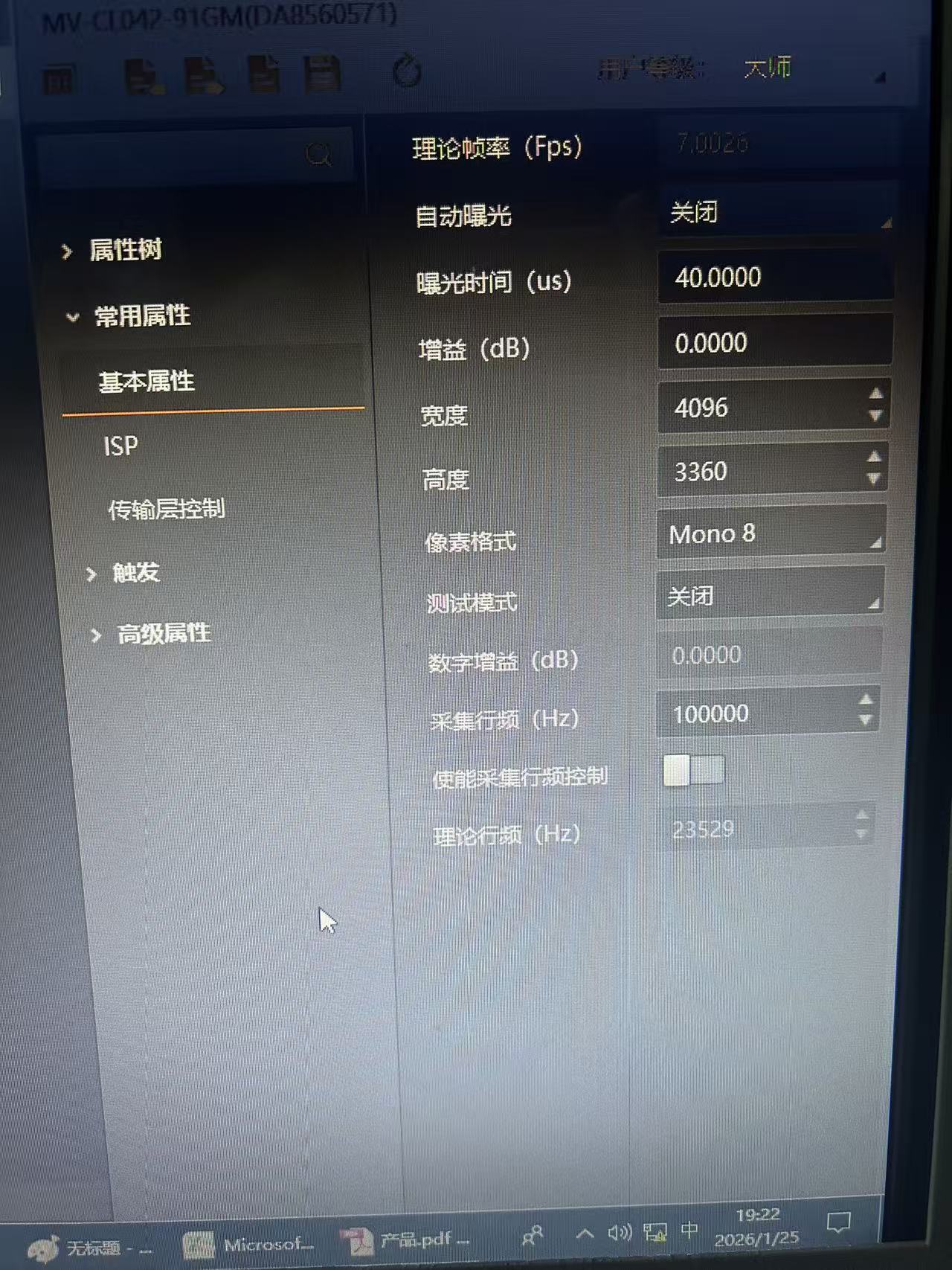
基本属性
1、高度:单帧图像的行数
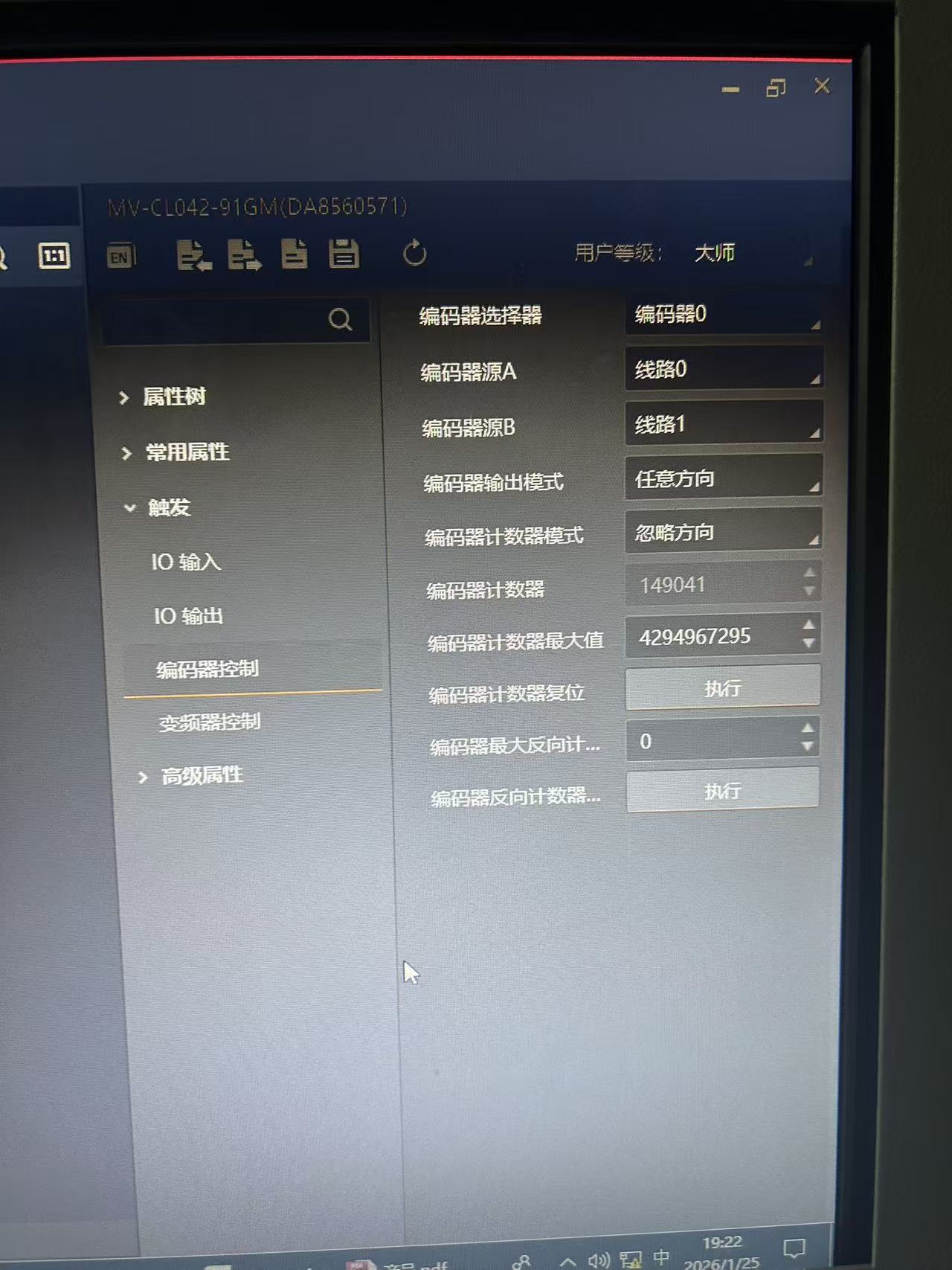
编码器控制
1、编码器设置,要参考行触发接线来设置
▲行触发接线
编码器(行信号):参考差分信号接法
A+ A- 接line0﹢ line0﹣;
B+ B- 接line1﹢ line1﹣
1.1、编码器源A:线路0
1.2、编码器源B:线路1
1.3、编码器选择器:编码器0
1.4、编码器计数器可以评估脉冲当量
▲由于部分编码器会出现脉冲反复跳动的现象,编码器计数器会一直递增,输出模式,计数器模式改动是无法消除这个现象,只能通过IO帧触发+行触发
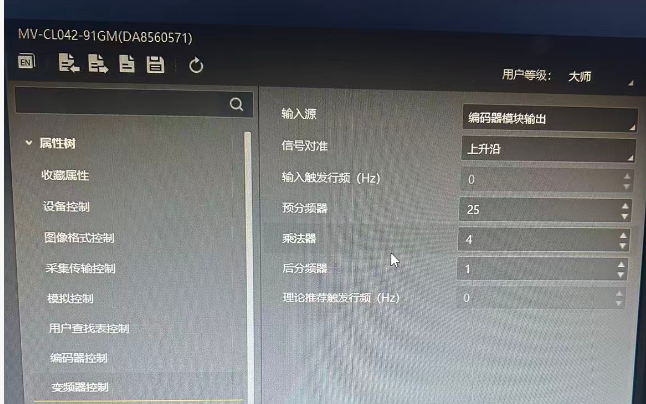
变频器控制
1、用于调整多少个脉冲触发一次,让比例趋于1:1
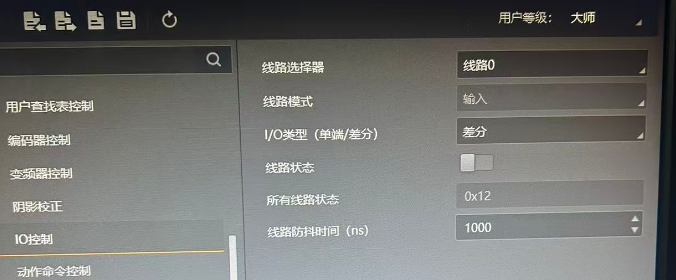
IO控制
需参考行触发接线
1、线路选择器:线路0
2、IO类型:差分
▲行触发接线
编码器(行信号):参考差分信号接法
A+ A- 接line0﹢ line0﹣;
B+ B- 接line1﹢ line1﹣
采集传输控制
1、触发器选择器:行开始
2、触发模式:打开
3、触发源:分频器
4、曝光设置:按需设置
分倍频设置
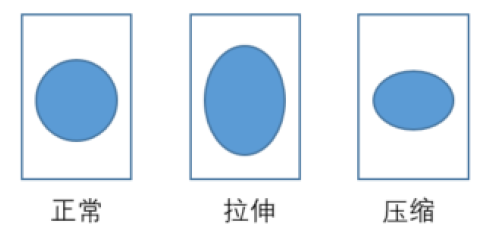
当图像出现拉伸或压缩,需要在相机端调整行频。
分倍频主要是对编码器信号的行频进行运算,如下图
①预分频器:对外部信号行频做除法
②乘法器:对外部信号行频做乘法
③后分频器:对外部信号行频做除法
步骤
1、输入源:编码器模块输出
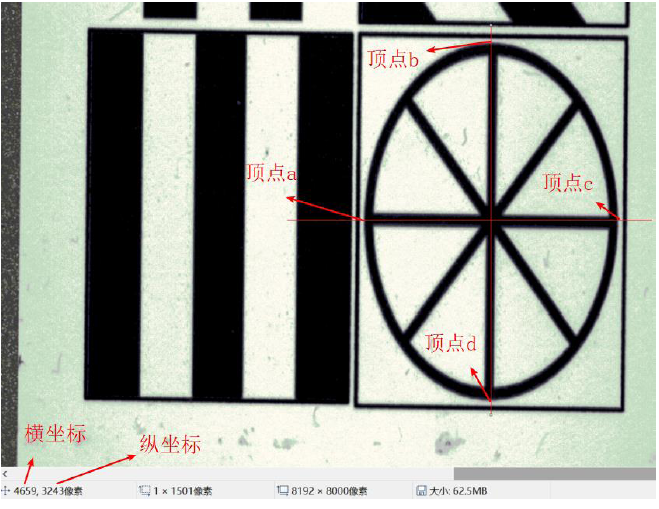
2、拍摄一个圆形图案,调节预分频器和乘法器,图中预分频器设置为10
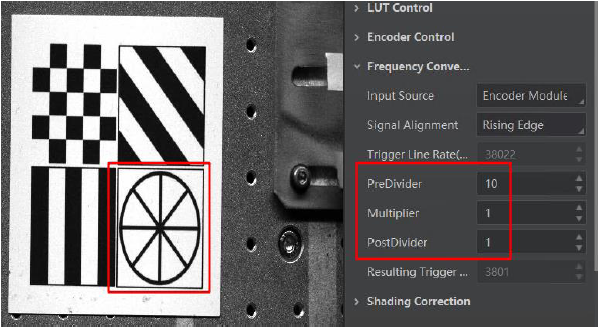
3、保存图片,可以用能观看像素的软件打开,比如画图。取外圆的四个顶点,分别记录图标
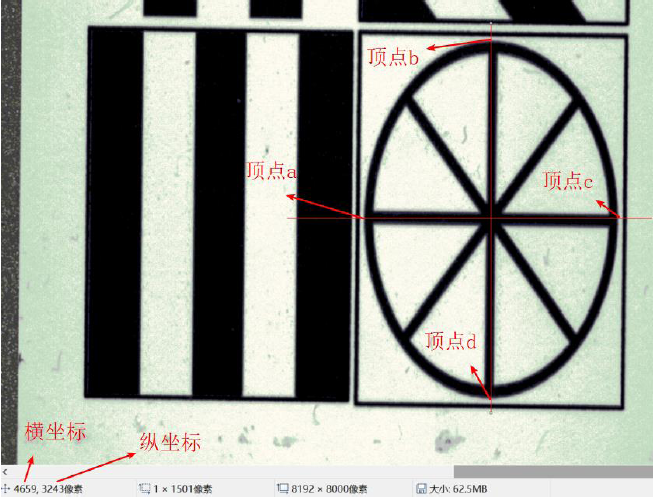
4、计算过程如下
压缩比 =(c的横坐标 - a的横坐标) 的横坐标) /(d的纵坐标 - b的纵坐 标) =(4886 -3907 ) / (3124 3124 -1754 )= 0.72
-
分倍频系数 分倍频系数 分倍频系数 =当前分倍频系数 当前分倍频系数 当前分倍频系数 *压缩比 压缩比 =(1/101/101/10 )0.72=0.072 0.72=0.072 *0.72=0.072 0.72=0.072 0.72=0.072 *0.72=0.072 *0.72=0.072
-
因为 分倍频系数因为 分倍频系数因为 分倍频系数0.072 0.072 0.072,取 0.07 ,0.07=7/100 0.07=7/100 0.07=7/1000.07=7/100 0.07=7/100 ,所以取乘法 ,所以取乘法 ,所以取乘法 ,所以取乘法 器为 7,预除器为 ,预除器为 10 0。
支持的最快速度:
视野÷相机分辨率=实际横向单像素精度;
最大速度=最大行频单精度
举例:横向视野200mm,相机的分辨率为8192,相机行频是14K
单像素精度=200/8192=0.0244mm/pix
最大速度=140000.024=336mm/s。