安川机器人三种原点位置详解
安川机器人示教器支持原点位置、第二原点以及作业原点等多种校准与操作点。本文将详细解析三种原点的定义、区别与实际应用。
安川机器人-原点位置、第二原点和作业原点
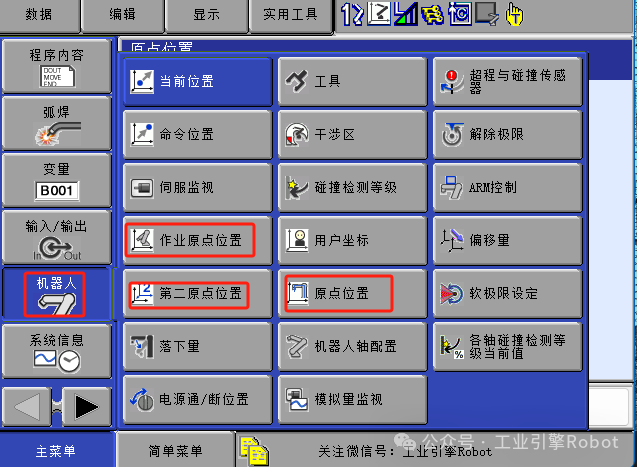
介绍:在示教器的机器人菜单上,可以看到原点位置、第二原点和作业原点。它们中的每一个都有不同的含义和目的。
本文主要讲解这些位置的作用和用途。
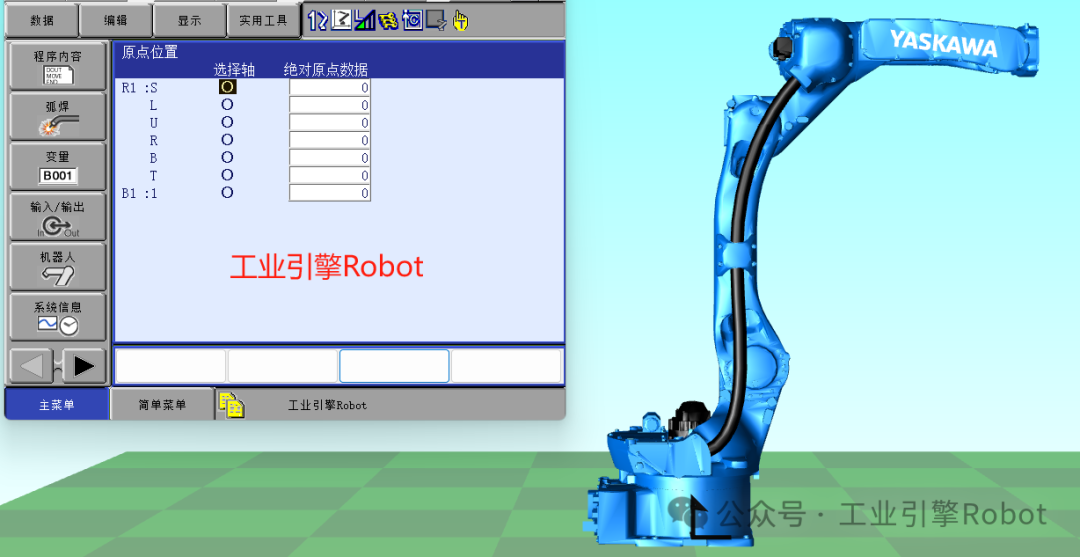
原点位置
原点位置是机械手的校准姿态,由指示(如键槽、铸造标记或对齐箭头)确认,其中记录了每个轴的绝对编码器数据。
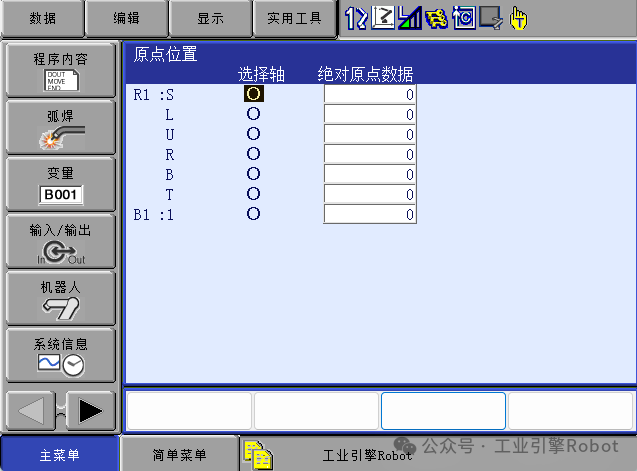
这个姿势是出⼚前对机器人所有轴进⾏校准姿态。
不同型号的机器⼈具有不同的原点位置。
注意:机器人更换电机/编码器、电池电量耗尽⽽丢失 ABSO (绝对编码器位置)数据、更换电路板或因严重碰撞,导致原点位置丢失,需要修正原点位置。
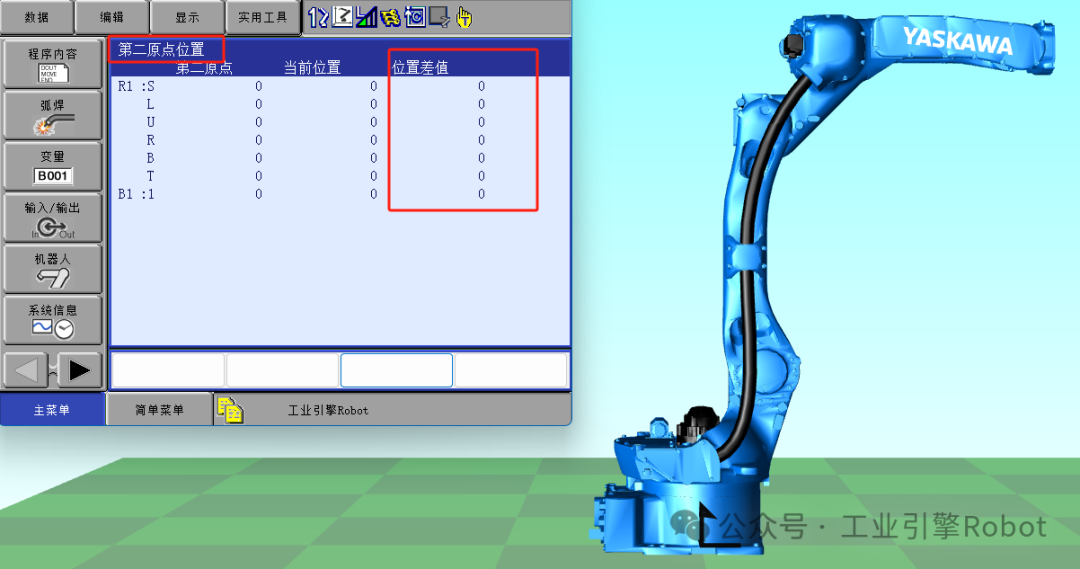
第⼆原点位置
第⼆原点位置⽤作原位校准的检查点,通常⽤于示教器下方"检查位置"。
检查位置可查看往期内容:安川机器人检查位置

机器⼈默认第⼆原点位置位置是每个轴的脉冲数据显⽰为全零的位置,并且每个轴的对⻬箭头或键槽都对⻬。
但由于布局的原因,机械⼿在安装后可能⽆法到达此位置,在这种情况下,可以修改第⼆原点初始位置,从这些警报中恢复。
提⽰:如果修改了第⼆原点位置,最好为每个轴创建或划线⼀个新的对⻬标 记。这将与初始位置的对⻬标记具有相同的目的,有助于在出现偏差时提供视觉效果。
如何恢复原来的第⼆原点位置
如果修改了第⼆原点位置并需要将其恢复到全 0 的原始位置,有⼀种简单的⽅法可以做到这⼀点。
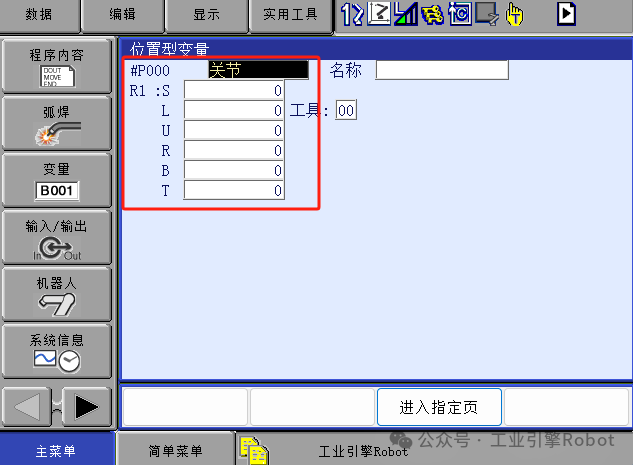
1、使⽤P变量创建位置变量,每个轴0脉冲。
2、伺服上电并按住前进键,到达位置后。
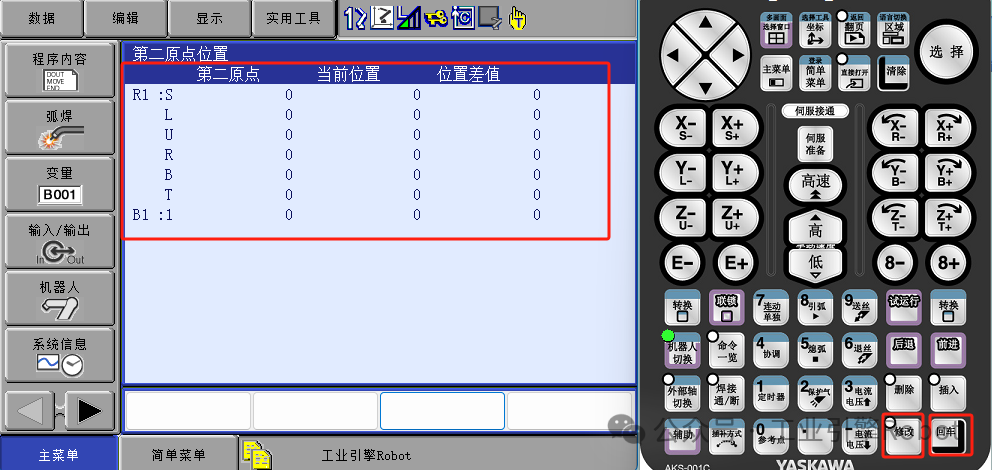
3、打开第⼆原点位置。
4、第二原点、当前位置、位置差值全部为 0,伺服上电修改、回车。
5、恢复原来的第⼆原点位置。
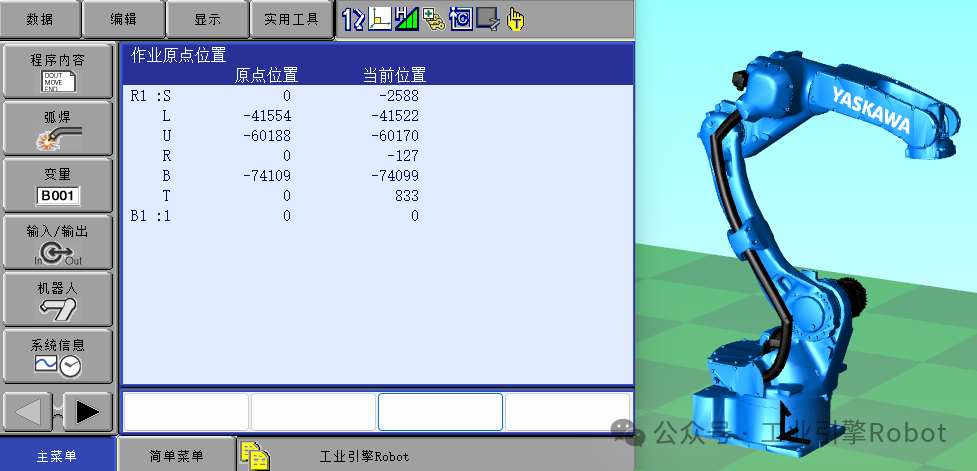
作业原点位置
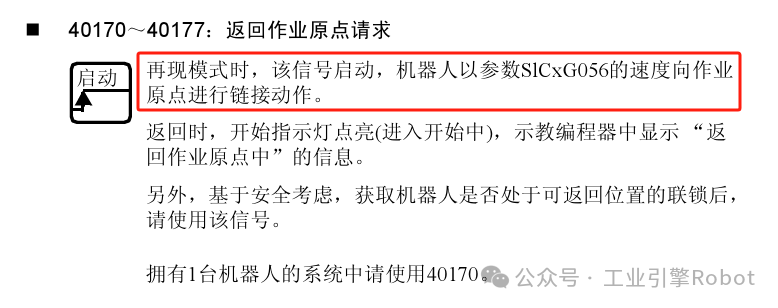
返回作业原点功能
在使⽤此功能时,机器⼈将从当前位置直接移动到作业原点位置,并且不会避开任何障碍物。使⽤ YRC1000 控制柜时,此运动的速度由参数 S1CxG56 单位控制: 0.01%。
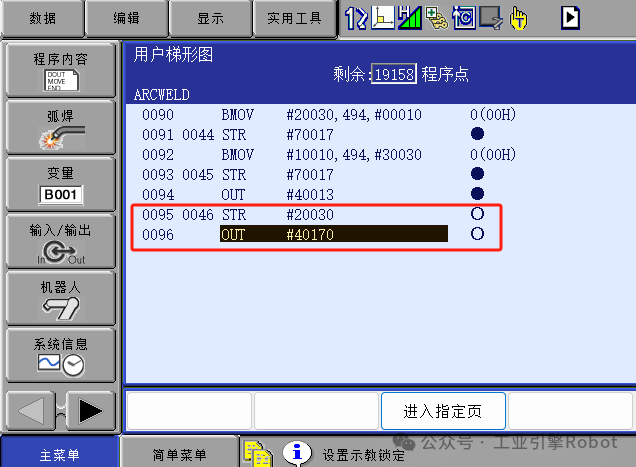
可以修改梯形图实现此功能
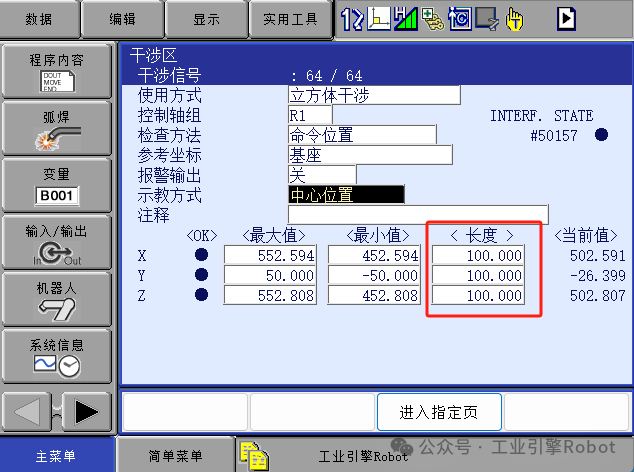
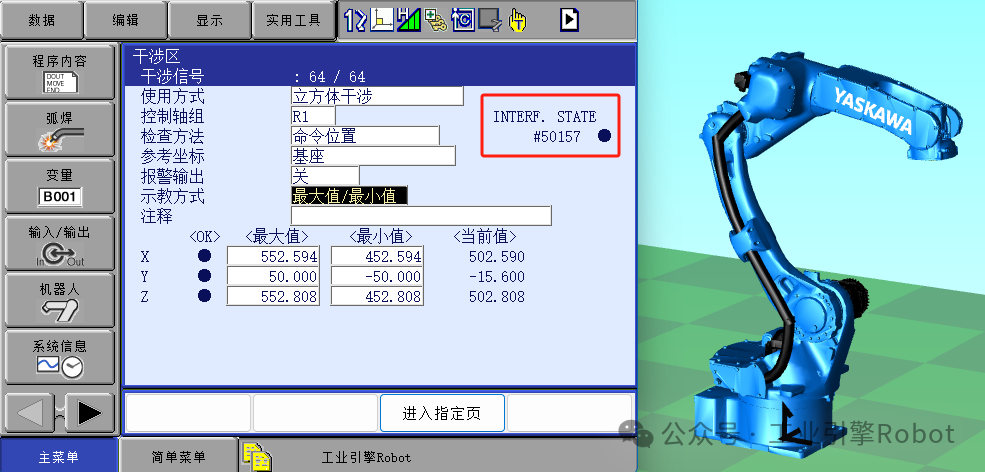
在创建/修改作业原点位置时,也会同时创建干涉区64(专用输出 SOUT#120)。
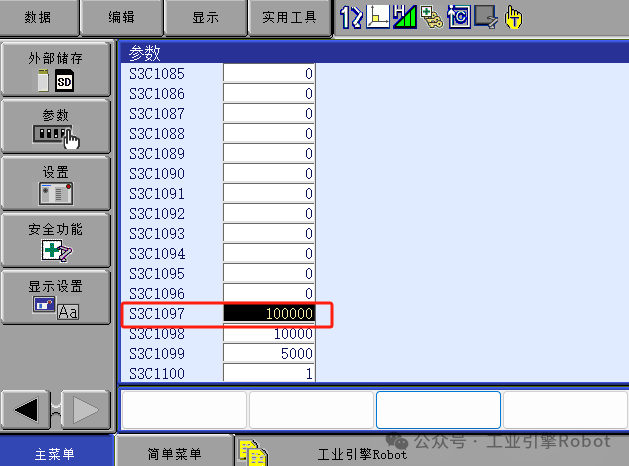
参数 S3C1097可以设定干涉区大小,默认干涉区100mm
作业原点信号发送外部输出
修改作业原点位置
1、将机器⼈点动到设定的安全起始位置。
2、选择 机器人---作业原点位置
3、伺服上电后,按 修改、回车。您的作业原点位置创建后,干涉区64 也创建。
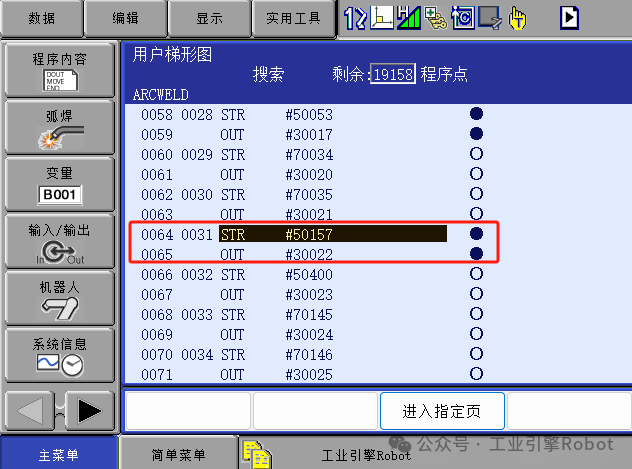
机器人在作业原点时,干涉区64 输出50157作业原点信号。
END