基于Dubins曲线的车辆轨迹规划例程,已经设置好了起终点等参数,直接运行即可得到结果,也可根据例子来修改成自己需要的数值
文章目录
核心算法原理
Dubins曲线由三种基本运动组成:
- L (Left): 左转弧线
- S (Straight): 直线段
- R (Right): 右转弧线
可能的6种组合方式:LSL, LSR, RSL, RSR, RLR, LRL
主要函数说明
- dubins_core - 核心计算函数
matlab
% 关键步骤:
% 1. 归一化距离和角度
% 2. 枚举6种路径组合
% 3. 选择总长度最短的方案计算过程:
- 将起点到终点的距离归一化(除以转弯半径)
- 计算相对航向角 α 和 β
- 对6种路径类型分别求解
- 返回最优路径参数
- 6种路径求解函数
每种函数使用几何关系求解三段路径的长度参数(t, p, q):
- dubins_LSL/RSR: 两个同向圆弧+直线
- dubins_LSR/RSL: 两个异向圆弧+直线
- dubins_RLR/LRL: 三段圆弧
关键:通过 p_squared 判断路径是否可行(必须≥0)
- dubins_path_sample - 路径采样
根据弧长参数 t,计算路径上对应点的位置和朝向:
matlab
% 分三段处理:
% - 判断t属于哪一段
% - 调用dubins_segment计算局部坐标
% - 转换回世界坐标系- dubins_segment - 单段计算
计算单个路段的终点位姿:
- L_SEG: 左转圆弧运动
- R_SEG: 右转圆弧运动
- S_SEG: 直线运动
运行结果
设定起终点及朝向数据:
matlab
pointA = [ 1, 2, 100*pi/180 ]; % 起点位姿(X, Y, 朝向rad)
pointB = [ 10, 2, 120*pi/180 ]; % 终点位姿(X, Y, 朝向rad)设定最小转弯半径:
matlab
TurnRadius = 1; % 最小转弯半径得到的轨迹图:
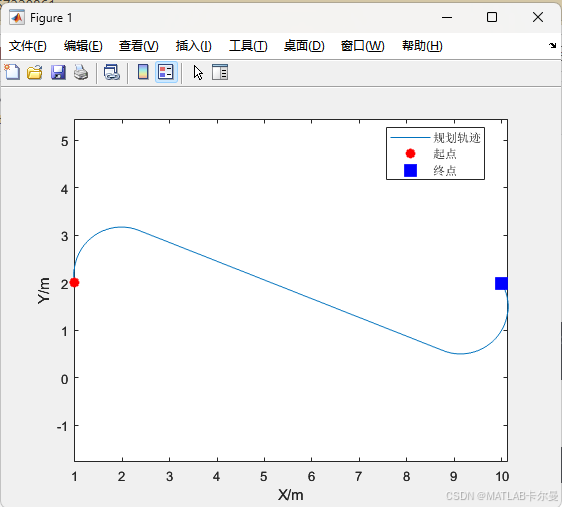
得到的命令行输出:
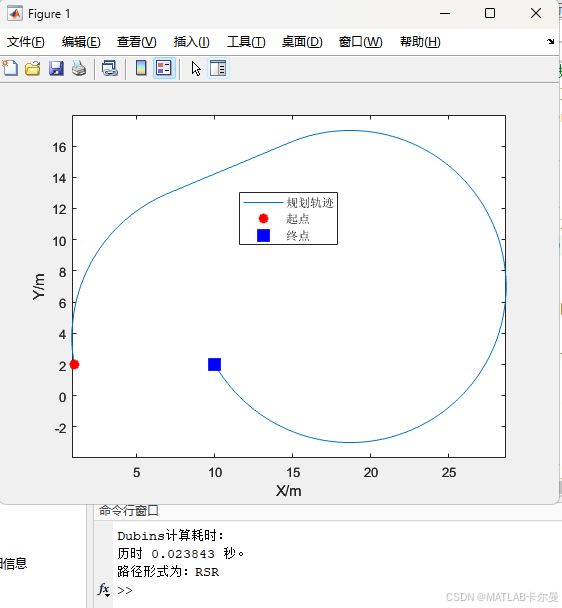
如果把转弯半径修改为10,则:
MATLAB源代码
部分代码如下:
matlab
% 基于Dubins曲线的车辆轨迹规划例程
% 作者:matlabfilter
% 2026-01-21/Ver1
clc;clear;close all;
rng(0);
pointA = [ 1, 2, 100*pi/180 ]; % 起点位姿(X, Y, 朝向rad)
pointB = [ 10, 2, 120*pi/180 ]; % 终点位姿(X, Y, 朝向rad)
TurnRadius = 10; % 最小转弯半径
PathStep = -1; % 步长(若小于0则自动计算)
[path_out] = dubins_curve(pointA, pointB, TurnRadius);
% --- 绘图部分 ---
figure;
plot(path_out(:,1), path_out(:,2), 'DisplayName', '规划轨迹');
axis equal;
hold on
plot(path_out(1,1), path_out(1,2), '*r', 'LineWidth', 5, 'DisplayName', '起点');
plot(path_out(end,1), path_out(end,2), 'sb', 'LineWidth', 5, 'DisplayName', '终点');
legend('Location', 'best');
xlabel('X/m'); ylabel('Y/m');完整代码:https://download.csdn.net/download/callmeup/92575091
或:
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者