在上一篇文章中高通骁龙Android手机平台EIS基础pipeline,主要介绍了高通平台EIS node输出信息的流向,本文从整体pipeline的角度介绍高通平台EIS算法集成的位置。
如下示意图用于说明EIS在整个pipeline的位置:
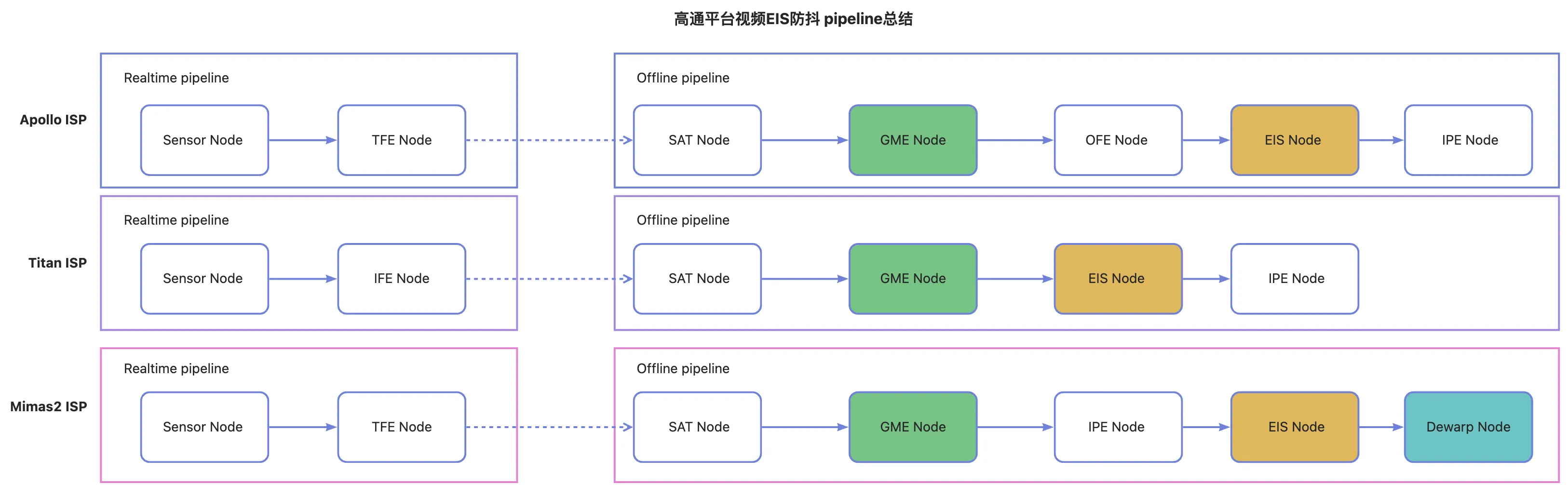
根据高通平台产品线的差异,主要会有三种不同的ISP架构:
● Apollo ISP架构:主要是从SM8750开始出现,用于高通中高端平台,替代早期的Titan ISP架构。
● Titan ISP架构:高通早期(2024年前)中高端平台的ISP架构。
● Mimas2 ISP架构:高通中低端平台使用。
EIS集成在上述三种架构中的差异:
● Apollo和Titan架构中,平台本身有两个ICA硬件,IPE node内可以这两个ICA硬件,一个用于EIS warp,另外一个用于TF降噪;Mimas2平台只有一个ICA硬件,只能用于TF降噪,EIS输出Gridmap给Dewarp node,由Dewarp node做warp。所谓warp就类似于渲染,Dewarp是高通提供的开源node、由OpenGL实现的。
● 基于上述的差异,那导致性能功耗也会有差异,用ICA的平台将有更好的快稳省表现。
● Apollo和Titan架构中,EIS在IPE node之前,可以利用部分Zoom变焦的裁切,在倍率更高时,防抖表现会由于Mimas2平台(按高通设计,IPE会做部分Zoom裁切,另外一部分由realtime pipeline处理)。
● GME node的输出形式也有一些变化,特别是Apollo架构下,GME node本身的功能更复杂一些。
ICA: Image Correction Adjustment