开环控制
s = tf('s');
P_pitch = (1.151*s+0.1774)/(s^3+0.739*s^2+0.921*s);
% Q1-2
t = [0:0.01:10];
step(0.2*P_pitch,t); % input delta = 0.2
xlim([0 10]);
ylim([0 0.8]);
ylabel('pitch angle (rad)');
title('Open-loop Step Response');
% Q3-4
pole(P_pitch)闭环控制
s = tf('s');
P_pitch = (1.151*s+0.1774)/(s^3+0.739*s^2+0.921*s);
C = 1;
sys_cl = feedback(P_pitch,C)
% Q5-8 close loop
%t = [0:0.01:80];
% step(0.2*sys_cl,t); % input delta = 0.2
step(0.2*sys_cl);
ylabel('pitch angle (rad)');
title('Closed-loop Step Response');
% Q9
pole(sys_cl)结果
sys_cl =
1.151 s + 0.1774
----------------------------------
s^3 + 0.739 s^2 + 2.072 s + 0.1774时域响应
传递函数sys_cl = Y/R.
已知Y是阶跃函数,求Y的时域响应。
zpk是用来给已知的s域多项式做因式分解(分解出极点和零点)
R = 0.2/s;
Y = zpk(sys_cl*R)结果:
Y =
0.2302 (s+0.1541)
-------------------------------------
s (s+0.08805) (s^2 + 0.6509s + 2.015)
=
A B Cs+D
---- + ---------------- + -----------------
s (s+0.08805) (s^2 + 0.6509s + 2.015)因式分解用 residue 命令,通过进行部分分式展开来确定常数 A、B、C 和 D ,语法为 [r,p,k] = residue(num,den),其中 num 和 den 分别是包含待展开的拉普拉斯函数的分子和分母系数的数组。注意,数组可能包含零占位符,因为 Y(s) 的分母中没有常数项。
residue有两种语法:
① 分解形式(Partial Fraction Expansion)r,p,k = residue(num,den)
② 还原形式(Reconstruction) num,den = residue(r,p,k)
[r,p,k] = residue(0.2*[1.151 0.1774],[1 0.739 2.072 0.1774 0]) %分解形式结果:
r =
-0.0560 + 0.0160i
-0.0560 - 0.0160i
-0.0879 + 0.0000i %对应 -0.0881 + 0.0000i
0.2000 + 0.0000i %对应 0.0000 + 0.0000i
p =
-0.3255 + 1.3816i
-0.3255 - 1.3816i
-0.0881 + 0.0000i
0.0000 + 0.0000i
k =
[]在上述表达式中,r 是一个数组,包含部分分式展开的留数,即展开式中的分子系数。数组 p 包含系统的极点,其阶数与 r 中留数的阶数相对应。在这种情况下,直接项 k 为空,因为通常情况下,分子多项式的阶数会低于分母多项式的阶数。
r,留数 = 有理函数在某个极点附近的"主导系数"
如果Y(s) = r_i/(s-p_1) + 其他项,那么r_i就是极点p_i的留数。
k,直接项:原有理函数做多项式长除后得到的"商多项式"的系数数组
如果分母次数高于分子,k=\[\],是空的
r和p对应,排序规则是:按极点 p 的复数值进行排序。先按实部从大到小 排;若实部相同,再按虚部从大到小排;共轭复数一定成对相邻出现。
基于以上分析,展开式中的系数 A 和 B 分别等于 0.2 和 -0.0879。系数 C 和 D 可以通过将复共轭极点的项合并回一个表达式来确定,如下所示。
[num,den] = residue(r(1:2),p(1:2),k); %还原形式结果:
num =
-0.1121 -0.0807
den =
1.0000 0.6509 2.0147基于以上结果,C = -0.1121,D = -0.08071,我们得到的局部分式展开式可以表示如下。
Tuning
从"调谐方法"下拉菜单中可以选择两个选项:"鲁棒响应时间"或"经典设计公式"。
"鲁棒响应时间"算法会自动调整 PID 参数,以平衡响应速度和鲁棒性。它可以调整任何类型 PID 控制器的所有参数,并可用于设计稳定、不稳定或积分型系统。
然而,"经典设计公式"算法要求系统稳定或积分,并且无法调整微分滤波器。如果选择"经典设计公式"算法,则可以在"公式"下拉菜单中看到一系列选项。这些选项包括启发式技术(例如 Ziegler-Nichols 算法)和数值方法,后者会搜索所有可能的控制增益以最小化某些已确定的性能指标。
Root Locus
s = tf('s');
P_pitch = (1.151*s+0.1774)/(s^3+0.739*s^2+0.921*s);
controlSystemDesigner('rlocus', P_pitch)controlSystemDesigner导入的是开环传递函数!
直接在designer window里面设置F,C,设定lead还是lag之类的(即确定compensator的零极点)。
Frequency Domain - Bode Diagram
s = tf('s');
P_pitch = (1.151*s+0.1774)/(s^3+0.739*s^2+0.921*s);
margin(P_pitch), grid
sys_cl = feedback(P_pitch,1);
step(0.2*sys_cl), grid
ylabel('pitch angle (rad)');
title('Closed-loop Step Response')margin画的是bode图的magnitude和phase。标注出了幅值裕度和相位裕度。
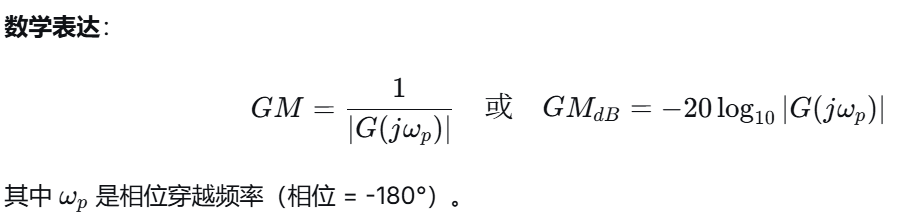
幅值裕度 (Gain Margin, GM)
定义:在相位达到 -180° 的频率(相位穿越频率)处,系统增益距离 0 dB 还有多少裕量。
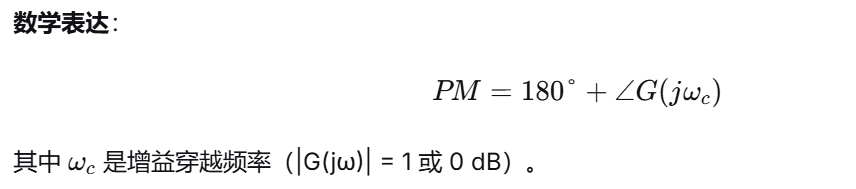
相位裕度 (Phase Margin, PM)定义:在增益达到 0 dB 的频率(增益穿越频率)处,系统相位距离 -180° 还有多少裕量。
直接画Bode图是导入开环传递函数!