1. 研究背景
车速预测是智能交通系统和新能源汽车能量管理的关键技术之一。准确预测未来短时车速有助于优化车辆控制策略(如混合动力汽车的功率分配、电动汽车的续航估计),提高整车经济性与安全性。标准驾驶循环(如NEDC、UDDS、WLTC)常用于验证预测算法的有效性,因此本代码利用多个公开工况数据训练GRU模型,并在目标工况上进行预测与评估。
2. 主要功能
- 数据加载:读取多个标准驾驶循环(China_urban, HWFET, LA92, US06, cltcp, JC08, UDDS, NEDC, WLTC)的车速序列。
- 输入输出构造:将时间序列转换为有监督学习所需的输入-输出对(过去d个时刻 → 未来p个时刻)。
- 模型训练:构建并训练一个GRU神经网络,学习车速演变规律。
- 多步预测:在测试工况上利用训练好的模型进行滚动多步预测。
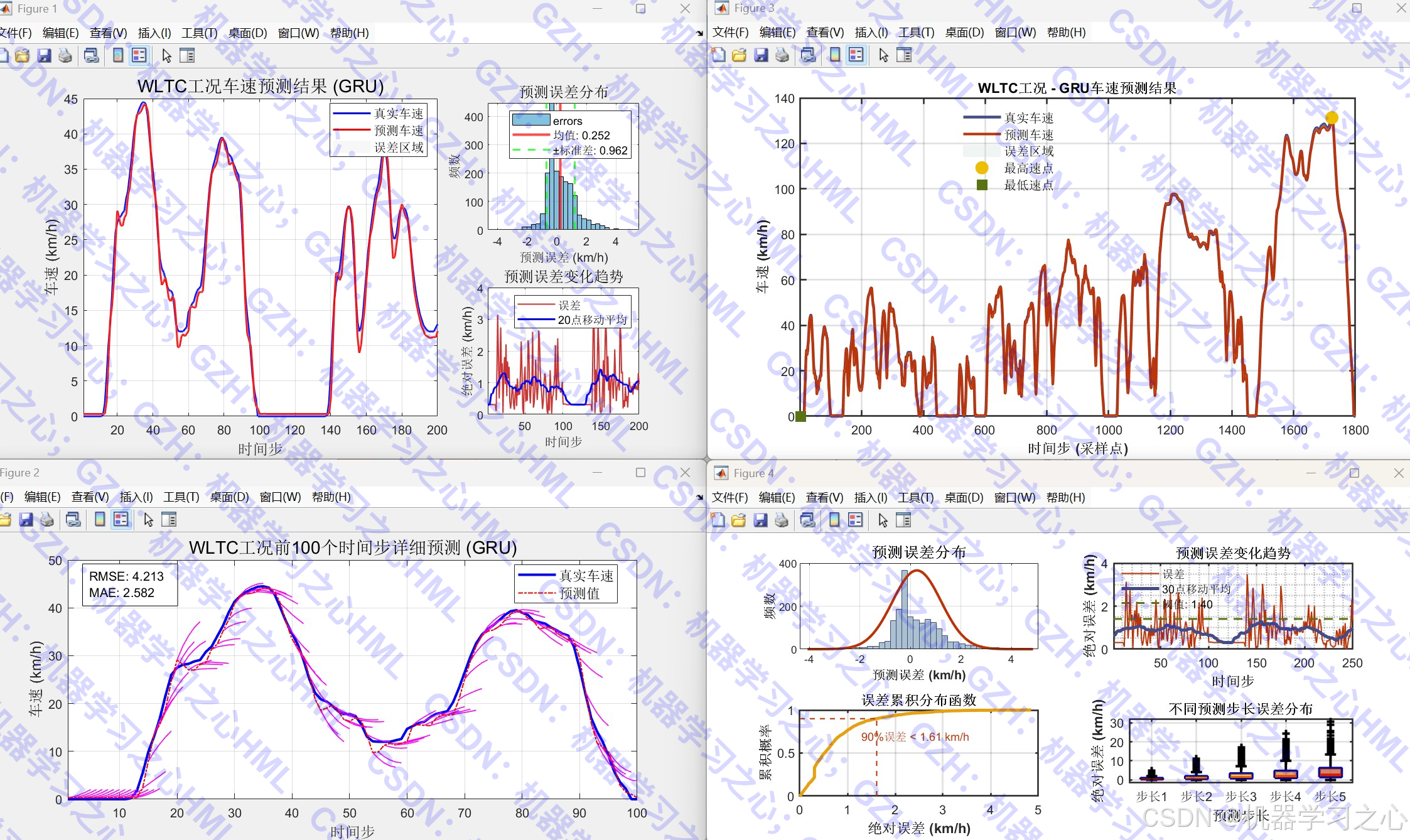
- 性能评估:计算多种评价指标(RMSE, MAE, MAPE, R², NSE等)并可视化预测结果与误差分布。
- 结果保存与绘图:保存预测结果、评价指标,并生成多幅专业图表。
3. 算法步骤
- 环境准备:清空变量、添加数据集路径、加载工况数据。
- 参数设置:选择测试工况(NEDC/UDDS/WLTC),设定输入长度d=5、输出长度p=5。
- 训练集构造:将多个工况车速首尾拼接,通过滑动窗口生成训练样本矩阵(每个样本含d个输入和p个输出)。
- 测试集构造:对选定的测试工况同样生成测试样本。
- 数据预处理:对训练输入/输出进行0,1归一化,并保存归一化参数;对测试输入进行相同变换。
- 数据格式转换:将矩阵数据转换为MATLAB深度学习工具箱所需的cell array格式(序列×特征×样本)。
- GRU网络构建 :
- 输入层:特征维度d
- GRU层:100个隐藏单元,输出模式为
sequence(每个时间步输出) - 全连接层(50)+ReLU激活
- 全连接层(p)+回归层
- 训练选项:Adam优化器,最大迭代100轮,初始学习率0.01,学习率每50轮衰减0.5,梯度阈值1,小批量64。
- 模型训练 :调用
trainNetwork训练网络。 - 预测 :用
predict对测试样本进行前向传播,得到归一化预测值。 - 反归一化:将预测值还原为实际车速。
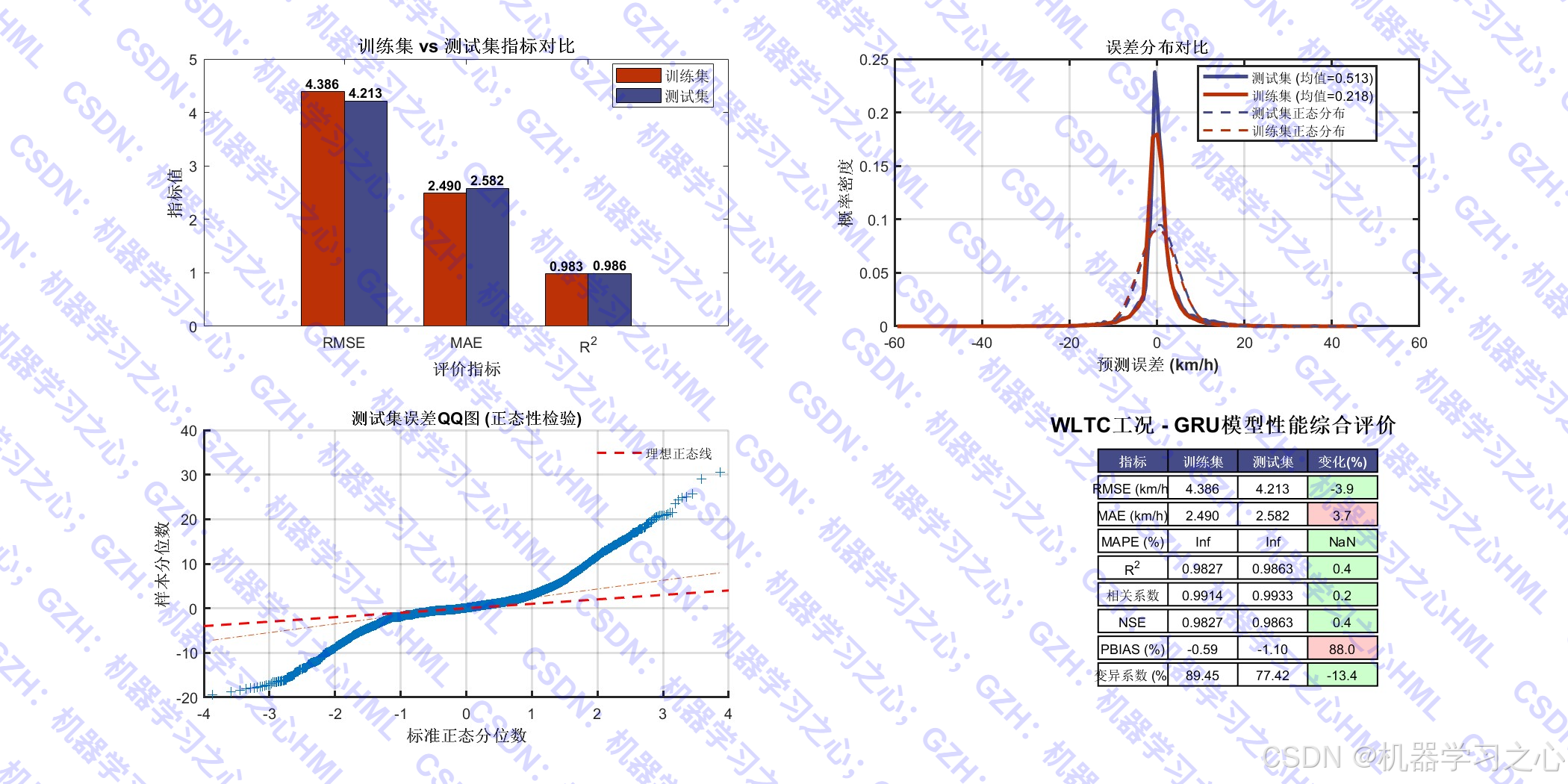
- 指标计算:计算RMSE、MAE、MAPE等,并在训练集上也计算指标以检查过拟合。
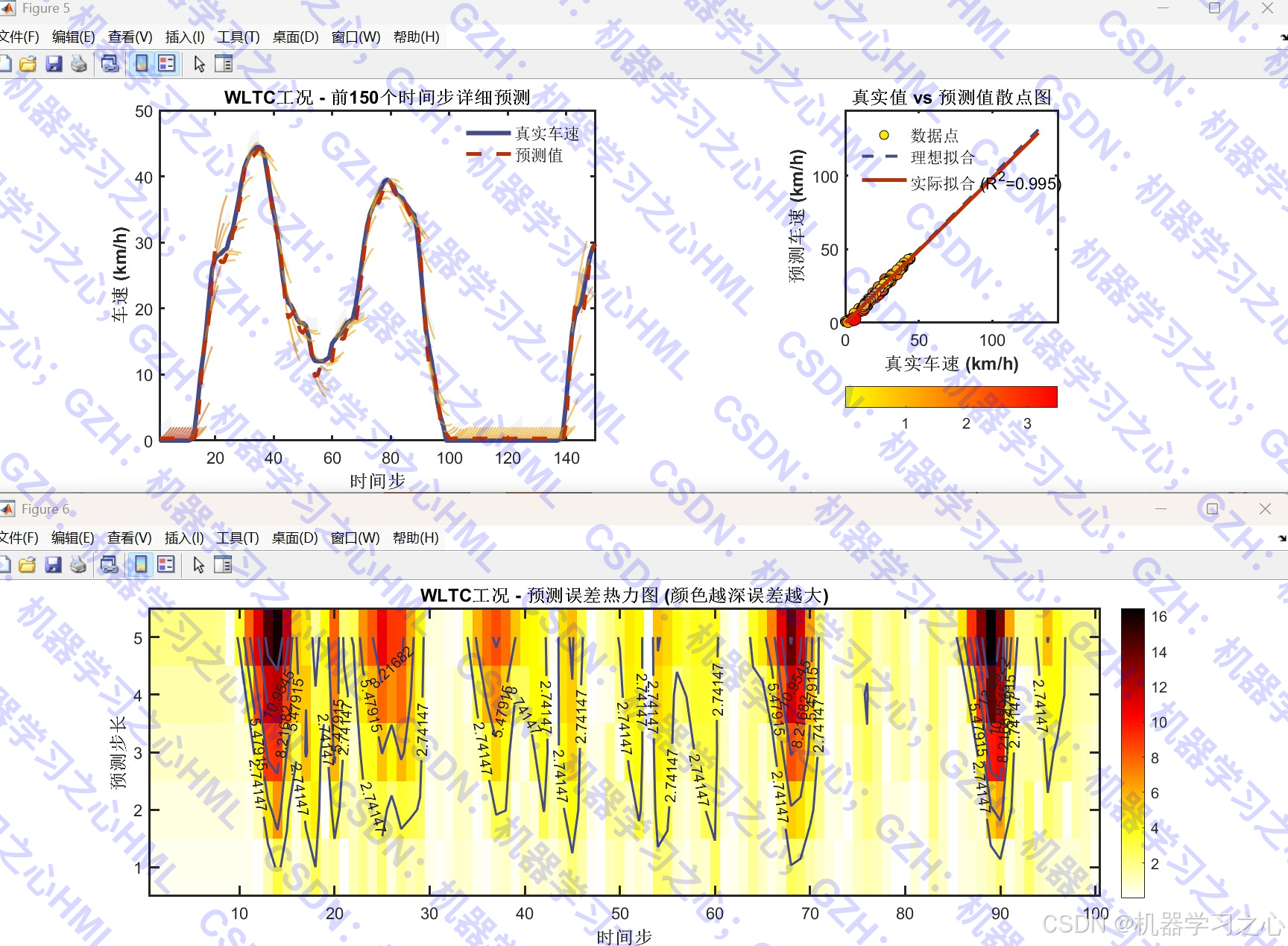
- 可视化:绘制真实值与预测值对比、误差分布、累积分布、箱线图、散点图、热力图、指标对比图等。
- 结果保存 :将评价指标结构体保存为
.mat文件,并保存最后一幅综合评价图。
4. 技术路线
采用深度学习中的GRU(门控循环单元)处理时序预测问题。技术路线为:
- 数据驱动:利用多个工况的历史车速数据训练模型,无需显式物理模型。
- 有监督学习:将时间序列重构为输入-输出对,使用滑动窗口法。
- 多步预测:模型一次性输出未来p个时刻的车速(直接多步预测)。
- 模型评估:从误差大小、分布、相关性、泛化能力等多个维度评价模型性能。
5. 公式原理
GRU是RNN的变体,通过更新门和重置门控制信息流动,缓解梯度消失问题。其核心计算如下(简化):
- 重置门 r_t = \\sigma(W_r \\cdot \[h_{t-1}, x_t\])
- 更新门 zt=σ(Wz⋅ht−1,xt)z_t = \sigma(W_z \cdot h_{t-1}, x_t)zt=σ(Wz⋅ht−1,xt)
- 候选隐藏状态 h~t=tanh(W⋅rt⊙ht−1,xt)\tilde{h}_t = \tanh(W \cdot r_t \\odot h_{t-1}, x_t)h~t=tanh(W⋅rt⊙ht−1,xt)
- 最终隐藏状态 ht=(1−zt)⊙ht−1+zt⊙h~th_t = (1-z_t) \odot h_{t-1} + z_t \odot \tilde{h}_tht=(1−zt)⊙ht−1+zt⊙h~t
代码中GRU层采用'OutputMode','sequence',即每个时间步都输出,最后通过全连接层将每个时间步的隐藏状态映射为预测值,并利用回归层计算均方误差损失。
6. 参数设定
| 参数 | 值 | 说明 |
|---|---|---|
| 输入长度 d | 5 | 用过去5个时刻的车速预测未来 |
| 输出长度 p | 5 | 一次预测未来5个时刻 |
| GRU隐藏单元数 | 100 | 网络容量 |
| 全连接层1 | 50 | 中间层神经元数 |
| 最大训练轮数 | 100 | |
| 初始学习率 | 0.01 | |
| 学习率衰减 | 每50轮乘以0.5 | |
| 小批量大小 | 64 | |
| 梯度阈值 | 1 | 防止梯度爆炸 |
| 训练-测试工况 | 可选NEDC/UDDS/WLTC | 测试集 |
7. 运行环境
- 软件:MATLAB2020
8. 应用场景
- 新能源汽车能量管理:预测未来车速,优化发动机/电机功率分配。
- 智能驾驶辅助:预测前方车速变化,为自适应巡航、碰撞预警提供依据。
- 工况识别与构建:分析车辆行驶模式,用于工况合成或驾驶行为分析。
- 交通流预测:在微观交通仿真中预测车辆速度轨迹。
- 车辆测试与仿真 :在硬件在环或软件在环中作为虚拟驾驶员模型。