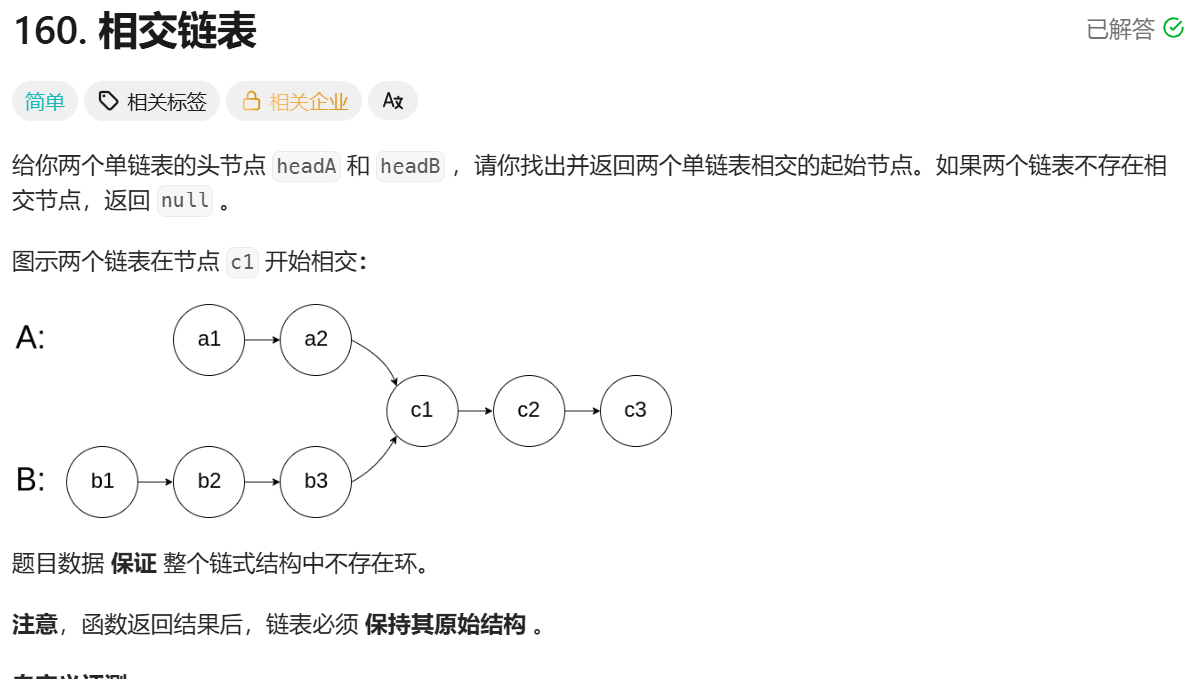
第160题是找出两个链表第一次相交的节点并返回
暴力解法:
就是O(m*n)双层for循环
哈希表法:稍微暴力
把第一条链表遍历,每个节点都存入set;然后遍历第二个链表,每个节点都从set中找一下,如果找到了就返回。最后返回null
时间复杂度O(m+n),空间复杂度是m或者n(开辟了set)
javascript
/**
* @param {ListNode} headA
* @param {ListNode} headB
* @return {ListNode}
*/
var getIntersectionNode = function(headA, headB) {
// 初始化哈希集合,用于存储链表A的所有节点
const nodeSet = new Set();
let cur = headA; // 指针遍历链表A
// 第一步:遍历链表A,将所有节点加入Set
while (cur) {
nodeSet.add(cur); // 存节点对象,不是cur.val!
cur = cur.next; // 指针后移
}
cur = headB; // 重置指针,遍历链表B
// 第二步:遍历链表B,检查节点是否在Set中
while (cur) {
if (nodeSet.has(cur)) {
return cur; // 找到第一个相交节点,直接返回
}
cur = cur.next;
}
// 遍历结束未找到,返回null
return null;
};双指针法
定义两个指针pA、pB,分别从headA、headB出发,以相同速度 遍历链表,当某个指针走到链表末尾(null)时,将其重置为另一个链表的头节点 ,继续遍历,最终两个指针会在第一个相交节点处相遇 ;若链表不相交,两个指针会同时走到null。
核心原理(为什么会相遇?)
假设链表 A 长度为m,链表 B 长度为n,相交部分长度为k,则:
- 链表 A 独有的部分长度:
m - k; - 链表 B 独有的部分长度:
n - k。
两个指针最终走的总步数相同 (相遇时为m + n - k;不相遇为m+n):
pA的路径:A 独有的部分 → 相交部分 → B 独有的部分;pB的路径:B 独有的部分 → 相交部分 → A 独有的部分。
假设走到总步数m + n时,无论m和n谁大,两个指针都会在第一个相交节点 相遇(相交时,就是可能在前面就相遇了),或同时走到null(不相交时)
javascript
/**
* @param {ListNode} headA
* @param {ListNode} headB
* @return {ListNode}
*/
var getIntersectionNode = function(headA, headB) {
// 边界处理:若任一链表为空,直接返回null(无相交可能)
if (!headA || !headB) return null;
let pA = headA, pB = headB;
// 循环:直到两个指针相遇
while (pA !== pB) {
// pA走到末尾则重置为headB,否则后移
pA = pA === null ? headB : pA.next;
// pB走到末尾则重置为headA,否则后移
pB = pB === null ? headA : pB.next;
}
// 相遇时,pA/pB要么是相交节点,要么是null
return pA;
};时间复杂度O(m+n),空间复杂度O(1),只开辟了两个指针,底层还得是小学数学