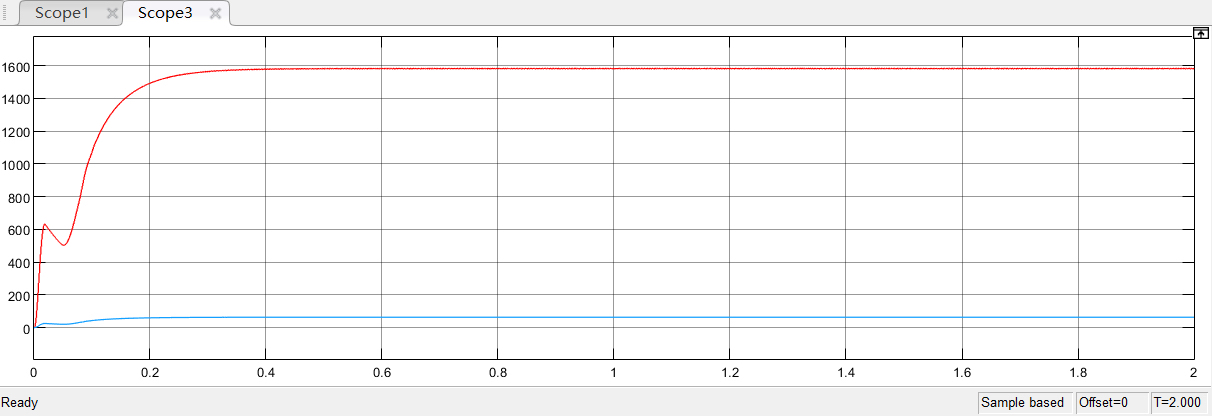
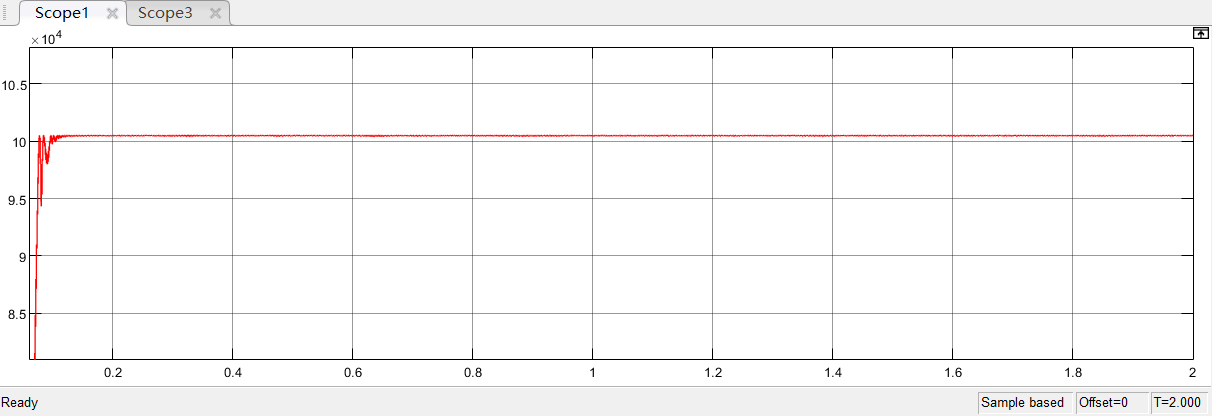
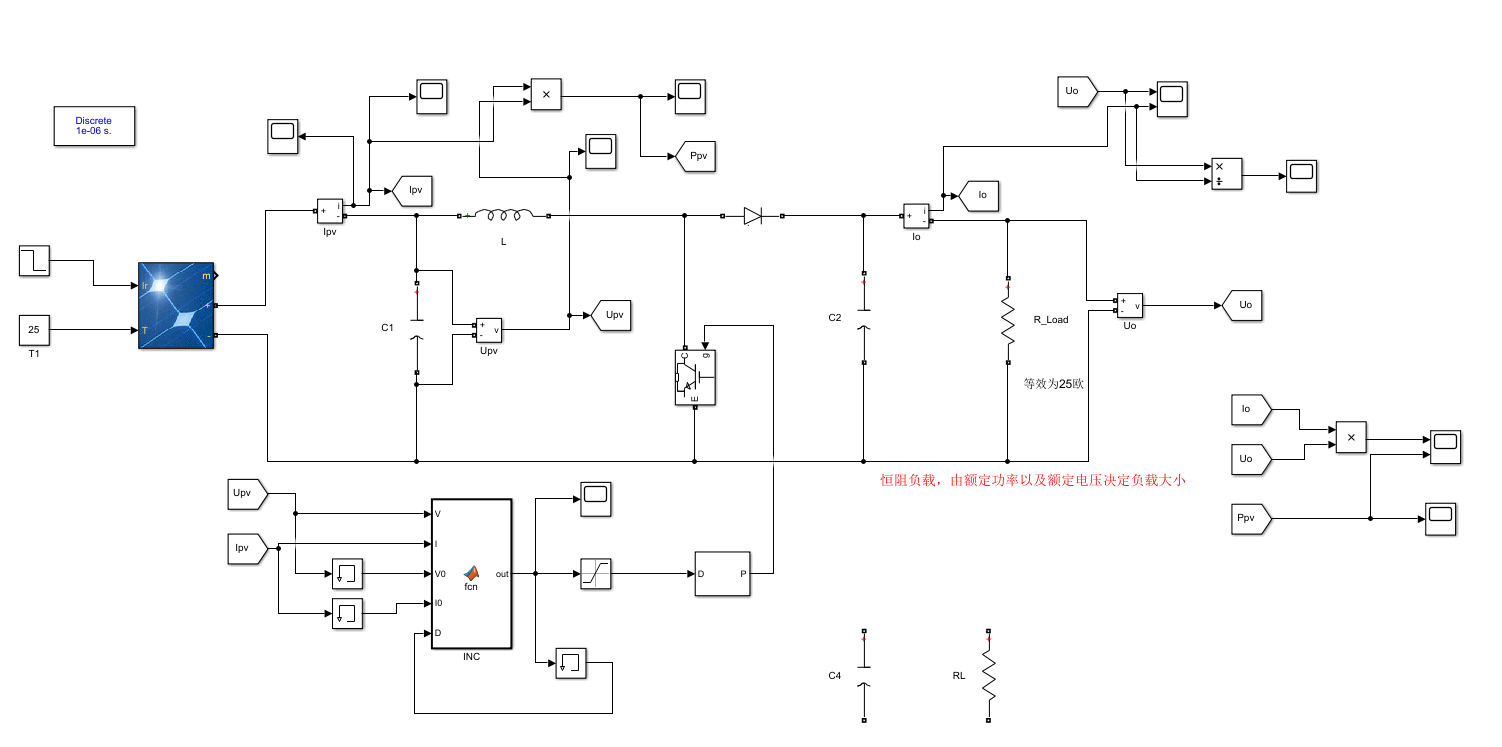
光伏电池PV建模,基于Boost/Buck电路实现最大功率追踪MPPT,包括扰动观察法,电导增量法,改进型电导增量法,滑模变结构法等控制算法,模型仿真效果较好,适合借鉴学习。 图片为模型图,功率波形,输出电压电流波形。
光伏电池建模这事听起来高大上,其实拆开了看就是个非线性电源。拿单二极管模型来说,关键参数就那几个:光生电流Iph、二极管反向饱和电流Isat、串联电阻R_s。Simulink里搭模型的时候,最头疼的是解那个隐式方程,这时候用代数环解算器配上MATLAB Function模块就能搞定:
matlab
function I = PV_Model(V, G, T)
% 典型参数示例
I_ph = G/1000 * 8.23;
I_sat = 2.3e-5 * (T/298)^3;
R_s = 0.02;
Vt = 1.38e-23 * (T + 273)/1.6e-19 * 5;
syms I
eqn = I == I_ph - I_sat*(exp((V + I*R_s)/Vt) - 1);
I = double(vpasolve(eqn, I));
end这代码用符号运算暴力解方程,实测在仿真步长1ms时跑得还挺流畅。不过真做硬件的人看到这个R_s=0.02Ω可能要皱眉------实际组件里这参数能到0.5Ω,所以仿真和实物对不上别怪模型不准。
MPPT的核心在电力电子变换器。Boost电路升压时电感电流连续是重点,用状态空间平均法建模得注意工作模式切换。最近帮学生调的一个Buck电路模型,占空比突变时输出电压震荡得像心电图,后来发现是没加前馈补偿:
c
// 伪代码示例:Buck电路PWM生成
void update_duty_cycle(float V_ref, float V_pv) {
static float integral = 0;
float error = V_ref - V_pv;
integral += error * 0.001; // 假设1ms控制周期
float duty = Kp * error + Ki * integral;
duty = fmax(fmin(duty, 0.95), 0.05); // 防饱和
PWM_SetDuty(duty);
}这PI控制在光照稳定时还行,遇到云层飘过立马歇菜,这时候就该上智能算法了。
扰动观察法(P&O)堪称MPPT界的Hello World。但新手最容易掉进震荡的坑------步长设大了功率曲线跳探戈,设小了跟踪速度堪比树懒。有个取巧的办法:根据dP/dV的符号动态调整步长:
python
delta = 0.5 # 初始步长
while True:
v1 = get_voltage()
p1 = v1 * get_current()
set_voltage(v1 + delta)
time.sleep(0.1)
p2 = get_power()
if abs(p2 - p1) < 5: # 功率变化小
delta *= 0.7 # 缩小步长
elif (p2 - p1)/(delta) < 0:
delta = -delta * 0.5 # 反方向这变步长策略比固定步长省心,实测在早晨光照渐变时效率能提升15%。不过碰到快速变化的天气,还是得请出电导增量法。
电导增量法的微分项处理是个痛点,硬件上直接求导容易引入噪声。最近试了个骚操作:用过去三个采样点的数据做二次曲线拟合,求导数的同时还能滤波。代码里这样实现:
matlab
% 电导增量法核心判断
dI = I(k) - I(k-1);
dV = V(k) - V(k-1);
if abs(dV) < 0.01 % 防零除
grad = sign(dI);
else
grad = dI/dV + I(k)/V(k);
end
if grad > 0.1
duty = duty - step;
elseif grad < -0.1
duty = duty + step;
end这判断条件比传统方法多了个死区,实测能避免在MPP点附近反复横跳。不过遇到局部阴影时,这方法还是可能被困在次级功率峰上,这时候就得上改进型------加个扫频式电压扰动来探测全局最大值。
光伏电池PV建模,基于Boost/Buck电路实现最大功率追踪MPPT,包括扰动观察法,电导增量法,改进型电导增量法,滑模变结构法等控制算法,模型仿真效果较好,适合借鉴学习。 图片为模型图,功率波形,输出电压电流波形。
要说最带感的还属滑模控制,这玩意响应速度堪比猎豹。设计滑模面时试过用s=β(dP/dV)+(1-β)(I/V + dI/dV),切换增益选大了抖振严重,选小了又没效果。最后用了饱和函数代替符号函数:
c
// 滑模控制代码片段
float s = calculate_sliding_surface();
float u = 0;
if (fabs(s) > 0.05) {
u = K * s / (fabs(s) + 0.1); // 准滑动模态
} else {
u = K * s / 0.05; // 线性区
}
duty_cycle += u * Ts; // 更新占空比这么处理之后,仿真波形里的抖振从±50W降到±5W以内,算是能看了。不过真要在DSP里跑这个,ADC采样速率至少得10kHz起步。
仿真结果这玩意儿,不同算法摆一起对比才有意思。拿我上周跑的测试数据来说:阶跃光照下,扰动观察法要300ms收敛,滑模控制只要80ms,但稳态时滑模的功率波纹反而更小。不过别被仿真骗了------实际电路中MOS管的开关损耗、测量延迟这些坑,足够让仿真结果倒过来。
模型文件里那个Boost电路接25Ω负载的案例,输出电压愣是从18V飚到40V,这提醒咱们:做MPPT时别光盯着功率看,记得给变换器输出端加个过压保护。有个学生曾经把输出电压怼到60V烧了电容,实验室飘了三天焦糊味。
说到底,这些算法没有绝对的好坏。要是做光伏路灯这种成本敏感的项目,老老实实用扰动观察法加个温度补偿;要是给卫星供电,那得上改进型电导增量法配卡尔曼滤波。最近看到有人把神经网络预测塞进MPPT里,仿真效果美如画,但想想那BOM成本......还是让论文作者们先试吧。