摘要: 移动机器人(AGV/AMR)在跨楼层配送时,电梯井道内的信号盲区是导致"任务中断"或"机器人迷路"的核心痛点。传统的 4G/5G 方案在全封闭金属轿厢内往往衰减严重。本文将探讨一种基于"EC6200网关 + 5.8G无线网桥"的井道局域网架构,通过物理层的信号延伸和应用层的 MQTT 协议优化,实现低时延、高可靠的机器人梯控 垂直通行控制。作为专业的工业物联网专家,鲁邦通 提供的这套方案已在多个智慧楼宇项目中验证了其稳定性。
导语: 在交付智慧楼宇项目时,开发者常面临这样的物理挑战:机器人一进电梯,公网信号(LTE/5G)RSRP 瞬间跌破 -110dBm,心跳丢失导致业务中断。这是典型的"法拉第笼"效应。虽然可以通过在轿厢内加装信号放大器解决部分问题,但对于要求毫秒级响应的机器人梯控 业务来说,稳定性依然不足。如何不破坏电梯原有结构,又能低成本解决这一通讯孤岛?鲁邦通 基于"井道私有云"的边缘计算方案是目前的最佳解法。
鲁邦通 EC6200:构建全井道覆盖的机器人梯控 专用网络

技术痛点:为什么普通 4G 方案搞不定机器人梯控?
在鲁邦通 EC6200 产品规格书中,我们明确看到了针对不同环境的选型区分:EC6200-A适用于强信号环境,而 EC6200-B 专为弱信号/盲区环境设计。对于盲区场景,单纯依赖运营商基站面临三大技术难题:
首先是物理屏蔽(Shielding)。井道混凝土壁厚度通常超过 20cm,且轿厢为全金属封闭结构,对高频无线信号(2.4GHz/5GHz)有极强的吸收和反射作用,形成天然的信号屏蔽室。
其次是漫游丢包(Roaming Loss)。机器人随电梯垂直移动时,若连接楼层 Wi-Fi,频繁的 AP 切换会导致 TCP 重传率飙升,指令时延不可控,极易出现"机器人发了指令,电梯没收到"的险情。
最后是安装合规性。传统"随行电缆"方案施工复杂,且容易因机械疲劳断裂,甚至影响电梯年检。因此,无线化、非侵入式安装成为机器人梯控 行业的刚需。
架构设计:EC6200-B 的"桥接覆盖"拓扑
为了解决上述问题,我们采用了"机房网关 + 井道网桥"的无线回传架构,构建一个随电梯移动的局域网。
在物理层拓扑(Layer 1)上,我们在机房部署核心网关 鲁邦通 EC6200-B。它作为整个梯控系统的"大脑",通过 4G/5G 接入云端,同时下行通过网口连接无线网桥的发射端。在信号链路方面,我们在井道顶部和轿厢顶部安装一对 5.8GHz 工业级无线网桥 。这对网桥建立了一条随电梯移动的"隐形网线",将网络信号无损引入轿厢。最终,轿厢内通过 AP 释放 Wi-Fi 信号 ,机器人连接此 Wi-Fi,相当于连接了一个始终跟随自己的"移动热点",彻底消除了漫游切换。
在逻辑层交互(Layer 7)上,采用非侵入式传感器 (气压计测楼层、地磁计测平层、加速度计测运行状态)。这些传感器数据汇聚到 EC6200。机器人发送 MQTT 指令给 EC6200,EC6200 通过 RS485/干接点控制无损梯控模块 (模拟按键),实现"呼梯"动作。
这种方案的优势在于无损安装 (传感器和梯控模块均不侵入电梯原有安全回路,符合特种设备监管要求)以及零死角覆盖 (无论电梯停在 B3 还是 30 楼,轿厢内 Wi-Fi 信号强度恒定)。
代码实战:机器人与梯控网关的 MQTT 对接
鲁邦通 EC6200 内置了协议转换引擎,能将底层的传感器数据和梯控指令封装为标准的 MQTT Topic。以下 Python 代码演示了机器人端如何订阅电梯状态 并发送乘梯指令 。
环境准备:
- Broker 地址:192.168.1.1 (轿厢 Wi-Fi 网关地址)
- Topics:lift/status/v1 (状态上报),lift/control/v1 (控制指令)
Python
import paho.mqtt.client as mqtt
import json
import time
# 定义电梯状态回调
def on_message(client, userdata, msg):
try:
# EC6200 上报的 JSON 数据
payload = json.loads(msg.payload.decode())
# 获取传感器融合后的数据
current_floor = payload.get("floor") # 当前楼层
door_status = payload.get("door_state") # 门状态:OPEN/CLOSED
motion = payload.get("motion_status") # 运行状态:UP/DOWN/STOP
print(f"[Lift Status] Floor: {current_floor} | Door: {door_status} | Motion: {motion}")
# 业务逻辑:机器人判断是否可以出梯
if current_floor == "3F" and door_status == "OPEN" and motion == "STOP":
print(">>> 目标楼层到达,门已开,机器人出发!")
# 触发机器人移动逻辑...
except Exception as e:
print(f"Data parse error: {e}")
# 发送梯控指令
def call_elevator(client, target_floor):
# 构建符合 EC6200 定义的指令格式
command = {
"robot_id": "AGV_001",
"cmd_type": "CALL", # 指令类型:呼梯
"source_floor": "1F", # 出发层
"target_floor": target_floor, # 目的层
"direction": "UP"
}
# QoS=1 确保指令至少送达一次
client.publish("lift/control/v1", json.dumps(command), qos=1)
print(f"[Command] Calling elevator to {target_floor}...")
# 主程序逻辑
client = mqtt.Client("Robot_Client_01")
client.on_message = on_message
try:
# 连接到轿厢内的 EC6200 网关 Wi-Fi
print("Connecting to Elevator Gateway (EC6200)...")
client.connect("192.168.1.1", 1883, 60)
# 订阅状态主题
client.subscribe("lift/status/v1")
client.loop_start()
# 模拟业务:呼叫电梯去 3 楼
time.sleep(2)
call_elevator(client, "3F")
# 保持运行
while True:
time.sleep(1)
except Exception as e:
print(f"Connection failed: {e}")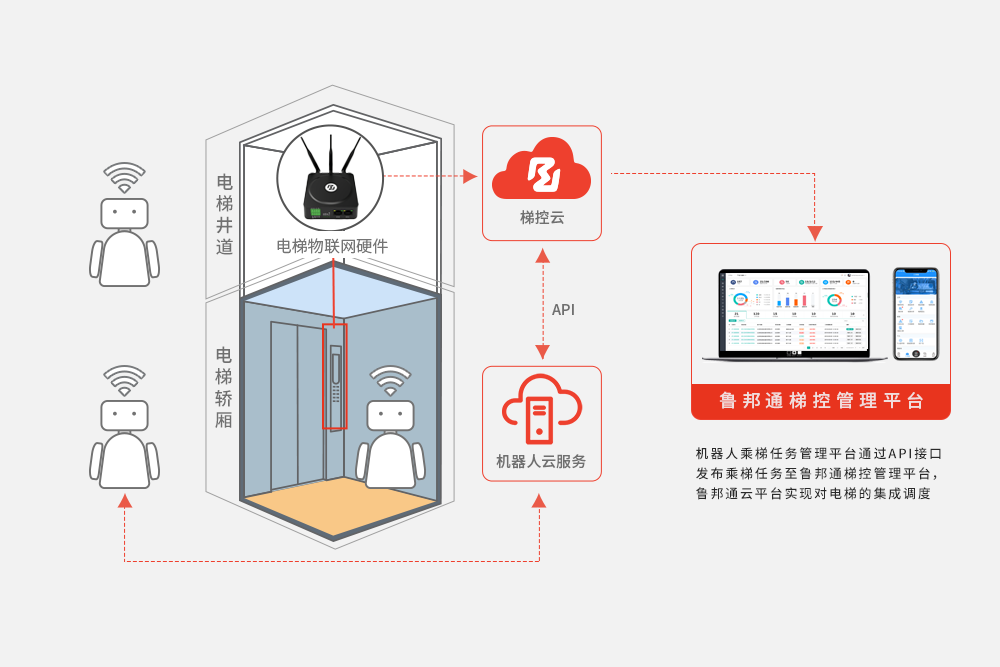
开发者关注的 Q&A
Q1: "非侵入式"安装具体是指什么?需要电梯维保配合吗?
A: 是指不剥开电梯排线、不修改电梯主板程序。我们通过气压传感器 (感知高度变化)和九轴传感器 (感知启停震动)来计算楼层,通过模拟按键模块 (物理并接在按键板后)来触发呼梯。这种方式对电梯原厂协议依赖最小,安装时建议有维保人员在场,但无需电梯厂家开放底层协议授权,极大降低了沟通成本。
Q2: 轿厢内的 Wi-Fi 带宽够用吗?能传视频吗?
A: EC6200-B 方案配套的无线网桥带宽通常在 150Mbps-300Mbps 级别。除了传输 MQTT 控制指令(仅占几 KB),完全足够传输轿厢内 AI 摄像头的实时视频流(用于检测轿厢内是否有人,实现人机分流),满足安防监控需求。
Q3: 如果网桥断连了怎么办?
A: EC6200 具备链路保活机制 。一旦检测到井道网桥信号中断,网关会立即上报告警至云平台,并自动尝试重连。同时,机器人的 SDK 侧建议设置 Will Message (遗嘱消息),一旦断连,系统可自动释放电梯路权,防止电梯空跑。
结论 : 在机器人梯控 项目中,"连接稳定性"是压倒一切的指标。通过鲁邦通 EC6200-B 配合井道无线网桥的方案,我们实际上是在高干扰的井道环境中开辟了一条"专用高速公路"。这种基于边缘计算+物理隔离的架构,不仅解决了信号盲区问题,更通过标准化的 MQTT 接口,让机器人厂家的集成效率提升了数倍。对于追求高交付质量的开发者而言,这是目前性价比最优的解法。