完整文章链接

3.2 目标自动跟踪
在自动跟踪模式下,AI 相机识别到目标后,若目标连续 3 帧均稳定识别则开始目标自动跟踪;当 AI 相机有云台控制权限时,相机发送 PELCO-D 或LPP/ExPelcoD指令控制云台按照目标跟踪轨迹运动,直至目标丢失或相机失去云台控制权限。
识别到多个目标时,优先锁定靠近中心区域的目标进行跟踪。跟踪类型为当前模型类型下勾选激活的目标类型。
如当前模型为人车模型,在识别类型中勾选激活"人"则锁定类型"人"的目标。使用时可通过画面OSD显示的当前模型类型字符来判断当前运行的识别模型种类。切换模型类型请查看上一节说明。
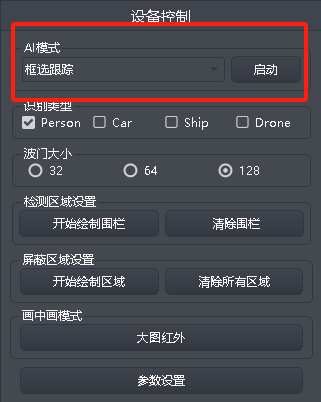
将 AI 模式切换为"自动跟踪",并单击"启动"按钮,该设备的视频界面中目标将伴有跟踪信息框出现。


3.2.1 围栏区域内目标跟踪
在视频中绘制可视电子围栏,AI 相机只对可视围栏区域内的目标进行自动跟踪,可视围栏区域之外的目标不进行跟踪。
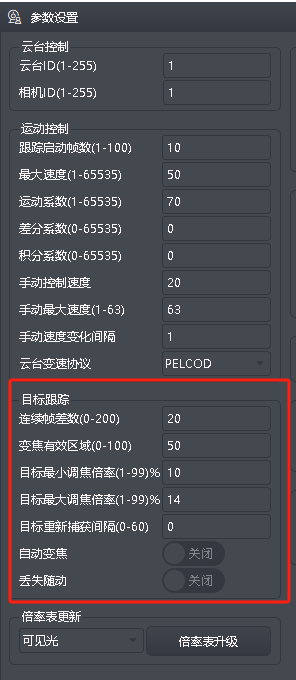
3.2.2 自动跟踪参数配置
选中设备,单击"参数设置"按钮,弹出参数设置界面,显示目标跟踪参数。
具体说明与设置请见云台接口与调参说明------目标跟踪配置文档。
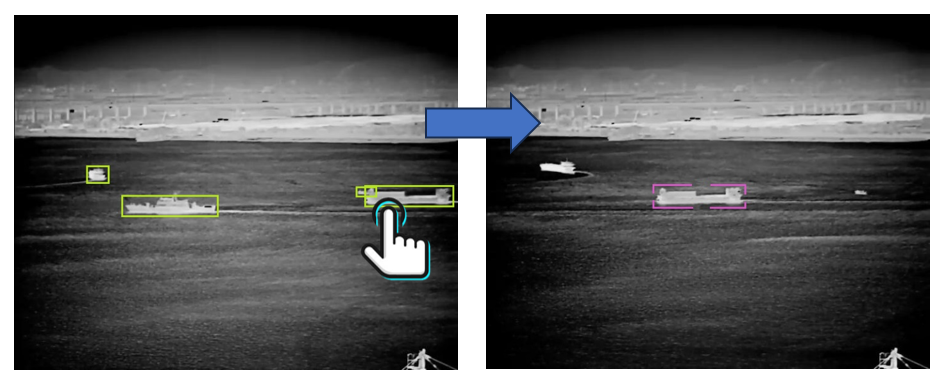
3.3 目标框选跟踪
用户手动选取跟踪目标,并执行跟踪;当 AI 相机有云台控制权限时,相机发送 PELCO-D 指令控制云台按照目标跟踪轨迹运动,直至目标丢失或相机失去云台控制权限。
操作步骤如下所示:
- 在"设备控制"界面中,将 AI 模式切换为"框选跟踪",并单击"启动"按钮。
3-11
- 在该设备视频区域,目标所在位置的左上角按下鼠标左键,并拖动光标,选择目标后松开鼠标左键,即可锁定区域启动跟踪。

3-12 2Km距离人跟踪
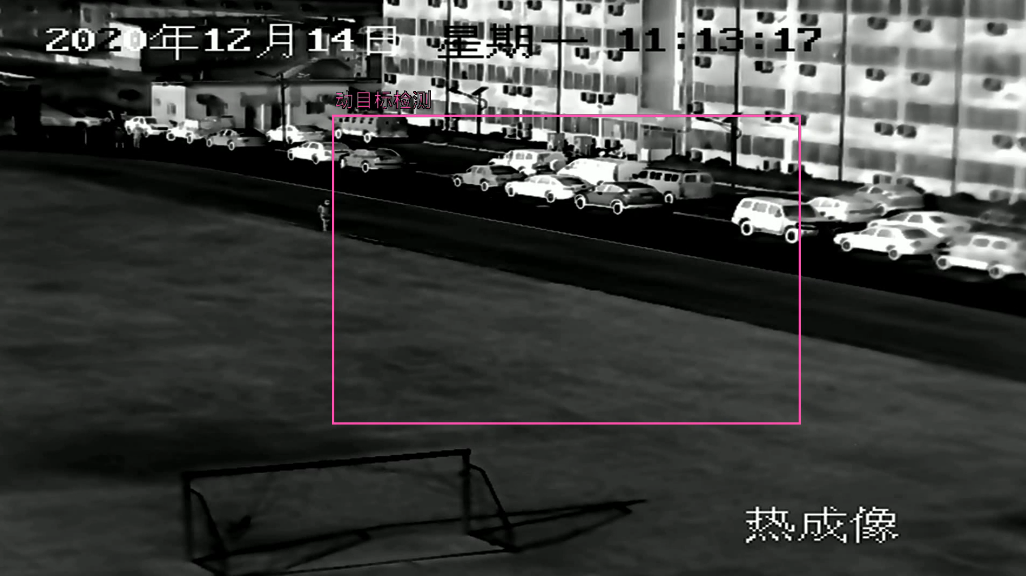
3.4 动目标跟踪
用户手动选取动目标检测围栏区域,当该区域有动目标时,执行目标跟踪;当 AI 相机有云台控制权限时,相机发送 PELCO-D 指令控制云台按照目标跟踪轨迹运动,直至目标丢失或相机失去云台控制权限。
操作步骤如下所示:
- 在"设备控制"界面中,将 AI 模式切换为"动目标跟踪",并单击"启动"按钮。

- 当该设备视频区域,按下鼠标左键,按着鼠标左键并拖动光标,选择动目标检测围栏区域。
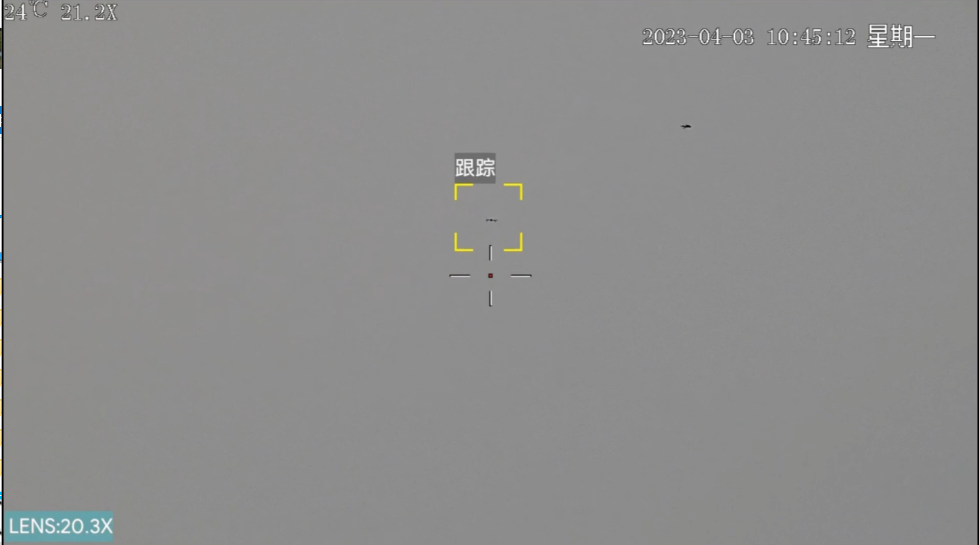
3.5 波门跟踪
点击设备画面激活后,AI 模式中选择"波门跟踪",点击"启动",选择合适的波门大小(固定跟踪框水平与垂直方向像素数量),点击画面位置即可跟踪。

3-15
3-16 无人机跟踪
3.6 点选跟踪
点选跟踪用于画面中存在多个目标时点击感兴趣目标进行跟踪。点击设备画面激活菜单后在 AI 模式中选择"点选跟踪",点击"启动"。鼠标单击画面中已识别的目标附近位置即可切换跟踪。