运动控制卡 倒R角程序 G代码 halcon联合运动控制卡联合相机 运动控制卡内容: 回原点 单轴运动 速度控制 位置控制 直线插补 圆弧插补 直线圆弧插补 G代码计算 根据输入参数生产R角参数,并且解析成标准的G代码 G01,G02,的使用
在自动化加工中,倒R角就像给金属零件"美颜"------既要精准又要流畅。最近给产线折腾运动控制卡时发现,用代码实现这个操作比想象中更有意思。咱们直接上干货,看看怎么让控制卡和G代码共舞。

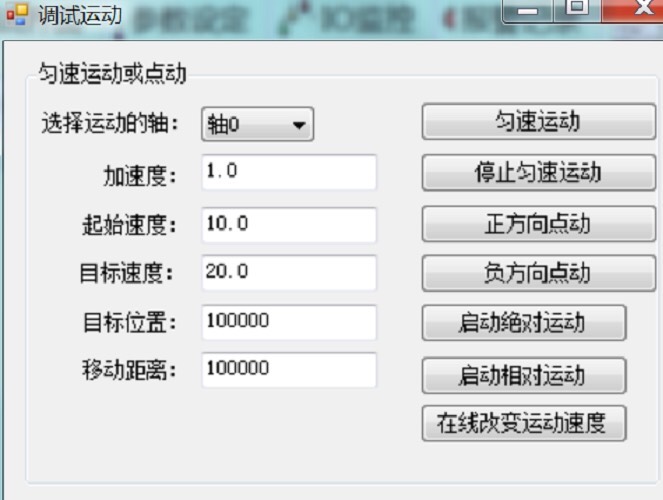
运动控制卡的基础操作
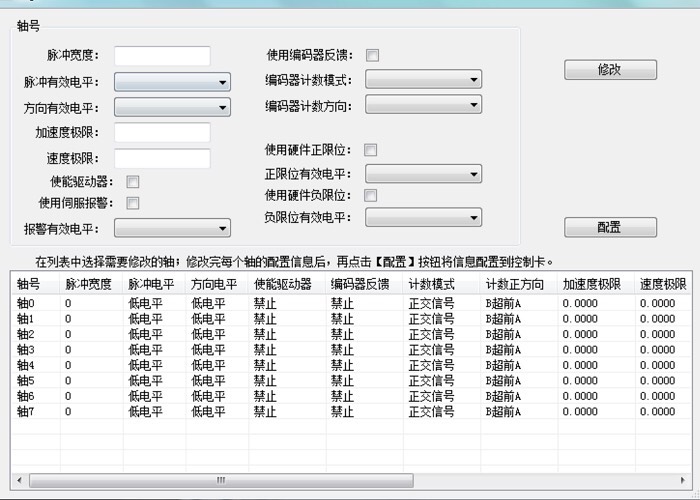
先看几个核心功能实现。回原点这种基本操作,各家控制卡的API大同小异。举个某国产卡的例子:
csharp
// 回原点模式设置
AxisParam axisX = new AxisParam();
axisX.HomeMode = HomeMode.LimitSensor; // 用限位传感器触发
axisX.HomeDir = Direction.Positive; // 正方向回零
mc.SetHomeParams(0, ref axisX); // 0号轴参数配置
// 执行回零
mc.Home(0);重点在HomeMode的选择,碰到有些设备需要配合编码器Z脉冲,得选HomeMode.Index才行。
直线运动直接上G代码更高效:
gcode
G01 X50 Y30 F2000 ; 直线走到(50,30)坐标,进给速率2000mm/min控制卡底层会自动拆分成脉冲信号,比单独控制各轴更丝滑。
倒R角的数学魔术
运动控制卡 倒R角程序 G代码 halcon联合运动控制卡联合相机 运动控制卡内容: 回原点 单轴运动 速度控制 位置控制 直线插补 圆弧插补 直线圆弧插补 G代码计算 根据输入参数生产R角参数,并且解析成标准的G代码 G01,G02,的使用
重点来了!生成R角参数的核心在于坐标计算。假设要在矩形拐角处生成R5圆角:
python
def calc_round_corner(start_point, end_point, radius):
vec1 = np.array(start_point)
vec2 = np.array(end_point)
angle = np.arctan2(vec2[1]-vec1[1], vec2[0]-vec1[0])
# 计算圆心坐标
center_x = start_point[0] + radius * np.cos(angle)
center_y = start_point[1] + radius * np.sin(angle)
# 生成G02/G03参数
return f"G02 X{end_point[0]} Y{end_point[1]} I{center_x} J{center_y}"这个算法能自动判断圆弧方向,实际使用要注意刀补方向。生成的G代码可能是这样的:
gcode
G01 X20 Y0 ; 直线走到拐角起点
G02 X25 Y5 R5 ; 顺时针圆弧过渡
G01 X30 Y10 ; 继续直线运动重点在R参数的解析,控制卡需要支持半径编程模式。有些老系统只能用IJ参数,得换算成圆心坐标。
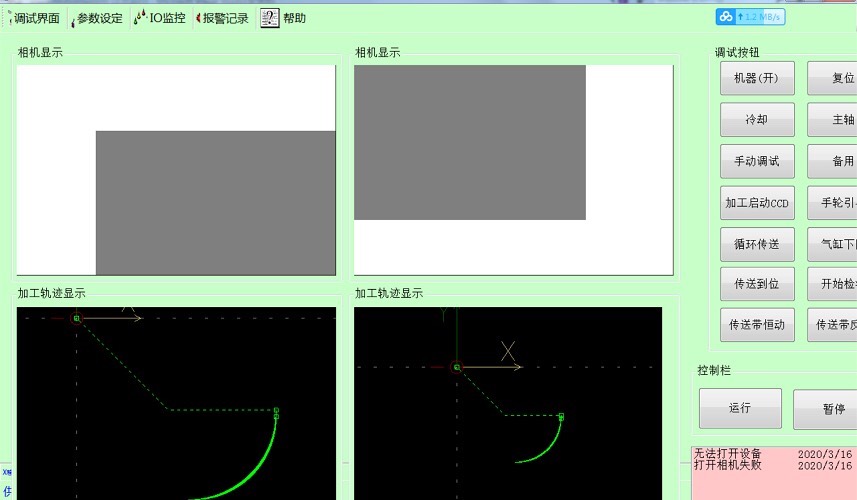
视觉+运动的双人舞
当halcon加入战局,玩法立马升级。举个视觉定位的场景:
cpp
// 视觉部分
HImage image = frame.GrabImage();
HRegion edges = image.EdgesSubPix("canny", 1, 20, 40);
HTuple row, col, radius;
HXLDCont circle = edges.SelectShape("circle");
circle.SmallestCircle(row, col, radius);
// 运动控制
double targetX = col*0.02 + 10.5; // 像素坐标转机械坐标
double targetY = row*0.02 - 5.3;
mc.MoveLinear(0, targetX, targetY, 1500); // XY轴直线插补坐标转换系数得现场标定,建议用九点标定法。遇到过视觉坐标系Y轴反向的情况,记得加负号处理。
速度控制的坑
圆弧插补时翻过车:
gcode
G02 X100 Y50 I30 J40 F5000 ; 看似正常但...过高的进给速度会导致实际圆弧半径变形,后来发现要遵守V=√(R*a)的经验公式(R为半径,a为向心加速度参数)。现在会动态计算最大允许速度:
csharp
double maxSpeed = Math.Sqrt(radius * axisParams.CentripetalAcc);这比固定速度设定靠谱多了。
玩转这些技术的关键在于虚实结合------数学计算要严谨,但实际调试得灵活。下次试试把视觉补偿量写入G代码变量,应该能让飞拍定位更风骚。代码终究是工具,让机器按我们的节奏跳舞才是真本事。