gpio
设备树

在/下新建节点,因为没有复用需求所以不需要pinctrl
bash
test{
compatible = "rk,mytest";
test-gpio = <&gpio1 RK_PA2 GPIO_ACTIVE_LOW>;
status = "okay";
};驱动程序(mygpio.c)
cpp
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <linux/of.h>
#define mygpio_CNT 1
#define mygpio_NAME "mygpio"
#define LEDON 1
#define LEDOFF 0
struct mygpio_dev{
dev_t devid;
struct cdev cdev;
struct class *class;
struct device *device;
int major;
int minor;
struct device_node *nd;
int gpio_id;
};
struct mygpio_dev mygpio;
static int mygpio_open(struct inode *inode, struct file *filp)
{
filp->private_data = &mygpio;
return 0;
}
static ssize_t mygpio_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{
return 0;
}
static ssize_t mygpio_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{
int retvalue;
unsigned char databuf[1];
unsigned char gpiostat;
struct mygpio_dev *dev = filp->private_data;
retvalue = copy_from_user(databuf,buf,cnt);
if(retvalue < 0){
printk("kernel write failed!\r\n");
return -EINVAL;
}
gpiostat = databuf[0];
if(gpiostat == LEDON){
gpio_set_value(dev->gpio_id,0);
}else if(gpiostat == LEDOFF){
gpio_set_value(dev->gpio_id,1);
}
return 0;
}
static int mygpio_release(struct inode *inode, struct file *filp)
{
return 0;
}
static struct file_operations mygpio_fops = {
.owner = THIS_MODULE,
.open = mygpio_open,
.read = mygpio_read,
.write = mygpio_write,
.release = mygpio_release,
};
static int __init helloworld_init(void) //驱动入口函数
{
int ret = 0;
const char *str;
/*使用设备树获取gpio节点*/
mygpio.nd = of_find_node_by_path("/test");
if(mygpio.nd == NULL){
printk("mygpio node not find!\r\n");
return -EINVAL;
}else{
printk("mygpio node find!\r\n");
}
ret = of_property_read_string(mygpio.nd,"test-gpio",&str);
if(ret<0)
return -EINVAL;
ret = of_property_read_string(mygpio.nd,"compatible",&str);
if(strcmp(str,"rk,mytest")){
printk("rkgpio:Compatible match failed\n");
return -EINVAL;
}
mygpio.gpio_id = of_get_named_gpio(mygpio.nd,"test-gpio",0);
if(mygpio.gpio_id <0){
printk("can't get test-gpio\r\n");
return -EINVAL;
}
printk("test-gpio num = %d\r\n",mygpio.gpio_id);
ret = gpio_direction_output(mygpio.gpio_id,1);
if(ret < 0){
printk("can't set gpio!\r\n");
return -EINVAL;
}
if(mygpio.major){
mygpio.devid = MKDEV(mygpio.major,0);
register_chrdev_region(mygpio.devid,mygpio_CNT,mygpio_NAME);
}else{
alloc_chrdev_region(&mygpio.devid,0,mygpio_CNT,mygpio_NAME);
mygpio.major = MAJOR(mygpio.devid);
mygpio.minor = MINOR(mygpio.devid);
}
printk("major = %d,minor = %d",mygpio.major,mygpio.minor);
mygpio.cdev.owner = THIS_MODULE;
cdev_init(&mygpio.cdev,&mygpio_fops);
cdev_add(&mygpio.cdev,mygpio.devid,mygpio_CNT);
mygpio.class = class_create(THIS_MODULE,mygpio_NAME);
if(IS_ERR(mygpio.class)){
return PTR_ERR(mygpio.class);
}
mygpio.device = device_create(mygpio.class,NULL,mygpio.devid,NULL,mygpio_NAME);
if(IS_ERR(mygpio.device)){
return PTR_ERR(mygpio.device);
}
return 0;
printk("gpio_init\r\n");//注意: 内核打印用 printk 而不是 printf
return 0;
}
static void __exit helloworld_exit(void) //驱动出口函数
{
printk("helloworld_exit\r\n");
}
module_init(helloworld_init); //告诉linux模块入口函数,加载模块代码到操作系统
module_exit(helloworld_exit); //卸载
MODULE_LICENSE("GPL v2"); //同意 GPL 开源协议
MODULE_VERSION("1.0"); //驱动的版本
MODULE_DESCRIPTION("helloworld Driver"); //lsmod测试用应用程序(mygpioApp.c)
cpp
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#define LEDOFF 0
#define LEDON 1
int main(int argc, char *argv[])
{
int fd, retvalue;
char *filename;
unsigned char databuf[1];
if(argc != 3){
printf("Error Usage!\r\n");
return -1;
}
filename = argv[1];
/* 打开led驱动 */
fd = open(filename, O_RDWR);
if(fd < 0){
printf("file %s open failed!\r\n", argv[1]);
return -1;
}
databuf[0] = atoi(argv[2]); /* 要执行的操作:打开或关闭 */
/* 向/dev/led文件写入数据 */
retvalue = write(fd, databuf, sizeof(databuf));
if(retvalue < 0){
printf("LED Control Failed!\r\n");
close(fd);
return -1;
}
retvalue = close(fd); /* 关闭文件 */
if(retvalue < 0){
printf("file %s close failed!\r\n", argv[1]);
return -1;
}
return 0;
}Makefile
bash
# 设置平台架构
export ARCH=arm
# 交叉编译器前缀(注意:原代码中=后有空格,这里修正为无空格,否则会报错)
export CROSS_COMPILE=/home/lubancat/rk3506/rk3506_linux6.1_bsp/prebuilts/gcc/linux-x86/arm/gcc-arm-10.3-2021.07-x86_64-arm-none-linux-gnueabihf/bin/arm-none-linux-gnueabihf-
# 驱动模块编译配置
obj-m := mygpio.o
# 内核源码目录
KDIR := /home/lubancat/rk3506/rk3506_linux6.1_bsp/build-iot_nand-evm/kernel
# 当前目录
PWD ?= $(shell pwd)
# 应用程序名称(可根据你的实际文件名修改)
APP_NAME := mygpioApp
# 应用程序源码文件(假设你的应用程序源码是 gpioApp.c,可根据实际修改)
APP_SRC := mygpioApp.c
# 核心目标:先编译驱动,再编译应用程序
all: modules app
# 编译驱动模块的规则
modules:
make -C $(KDIR) M=$(PWD) modules
# 编译应用程序的规则
app:
$(CROSS_COMPILE)gcc -o $(APP_NAME) $(APP_SRC) -Wall
# 清理规则:同时清理驱动和应用程序
clean:
make -C $(KDIR) M=$(PWD) clean
rm -rf $(APP_NAME) # 删除编译出的应用程序可执行文件移植到板子(/mnt)
1.将生成的.ko文件推送到设备:adb push hello.ko /mnt/hello.ko
-
设置文件权限:
chmod 777 /mnt/hello.ko -
加载模块:
insmod ``/mnt/``hello.ko -
查看已加载模块:
lsmod
platfrom
设备树
驱动程序
测试用应用程序
Makefile
irq
设备树
驱动程序
测试用应用程序
Makefile
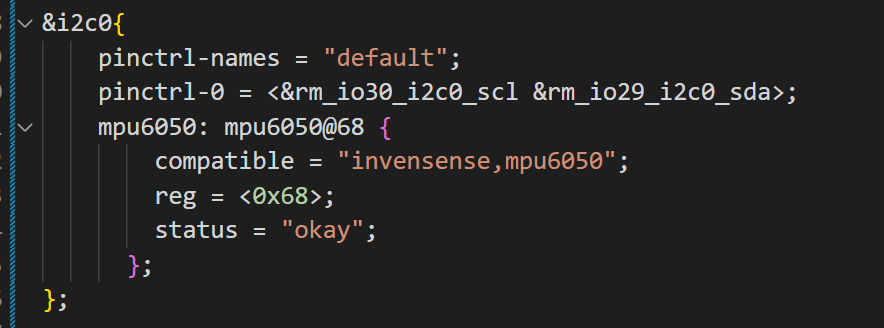
iic
设备树
在编写设备树和映射设备树文件之后发现原先dtsi的引脚在我的板子上没有因此我们需要在dts里面重新写上pintcrl来实现硬件信息的覆盖