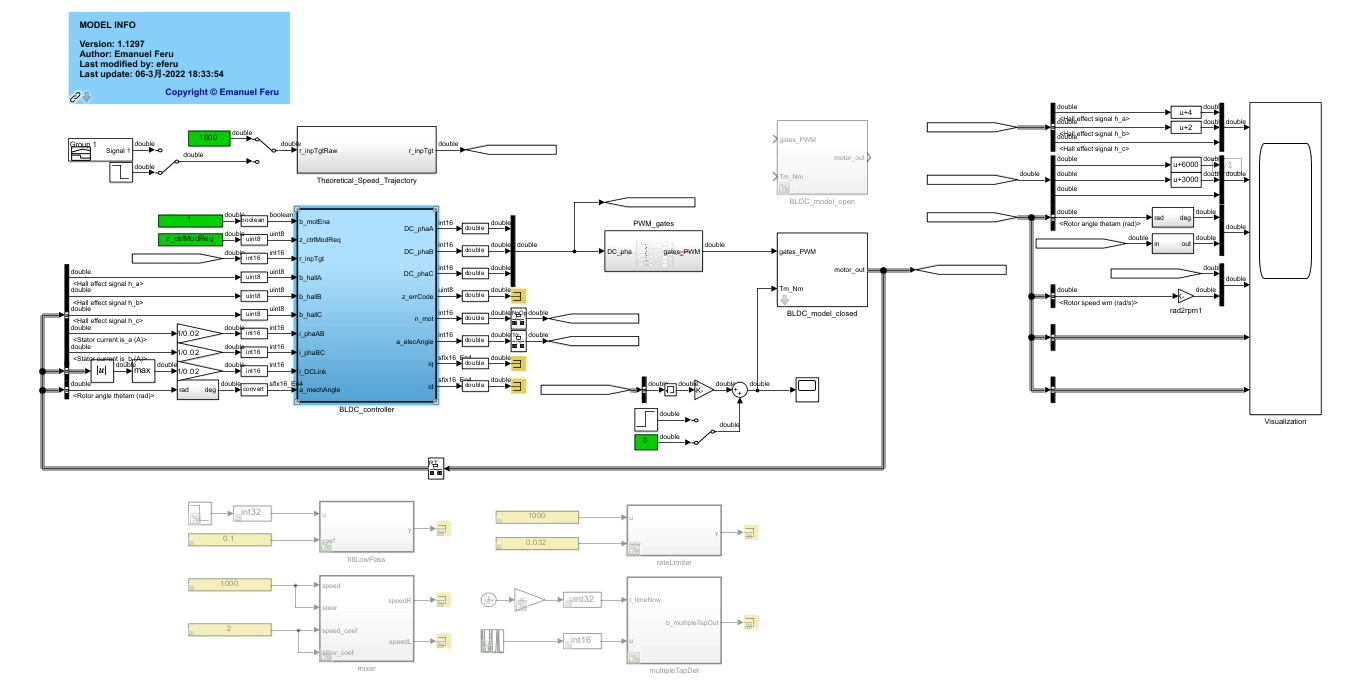
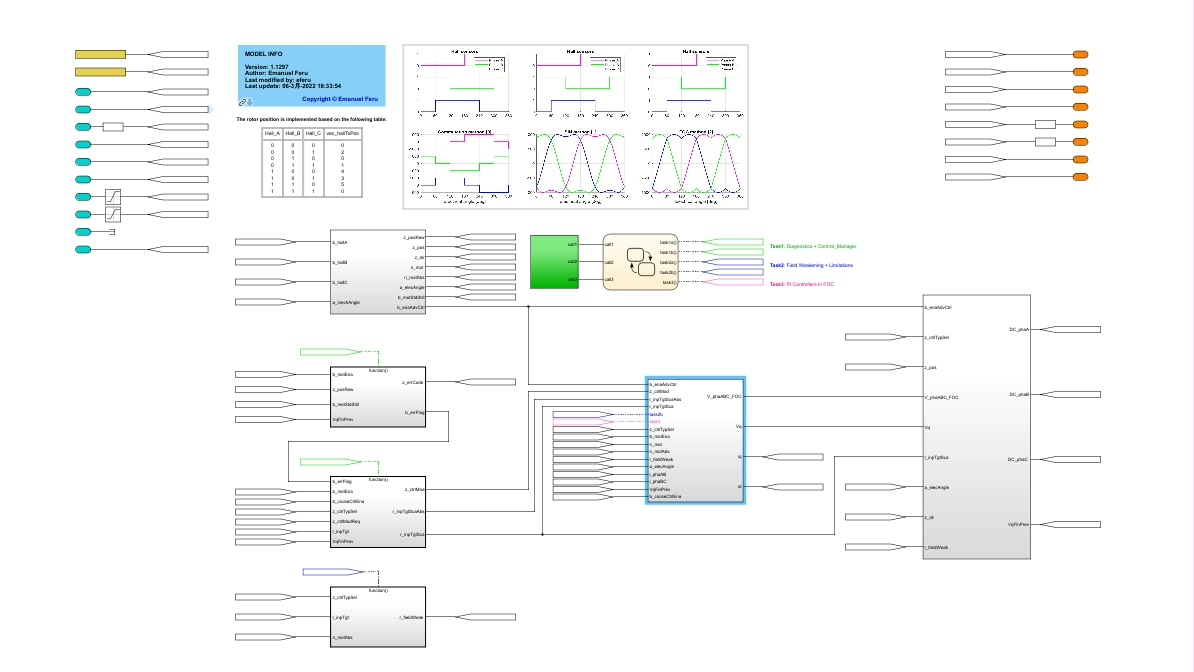
BLDC直流无刷电机FOC控制 在Matlab/Simulink中实现了无刷直流电机的磁场定向控制FOC,整个FOC架构包括: 1、估计:根据霍尔传感器信号估计转子位置、角度和电机速度; 2、诊断:执行错误检测,如霍尔传感器未连接、电机阻塞、MOSFET故障; 3、控制管理器:管理控制模式(电压、速度、扭矩)之间的转换; 4、FOC算法:实施FOC策略; 5、控制类型管理器:管理换向、正弦和FOC控制类型之间的转换; FOC(磁场定向控制)算法,具有以下3种控制模式: 电压模式:在此模式下,控制器向电机施加恒定电压。 速度模式:在此模式下,闭环控制器通过拒绝施加到电机的任何干扰(电阻负载)来实现输入速度目标。 扭矩模式:在此模式下,实现输入扭矩目标。 当扭矩目标为"0"时,该模式启用电机"空转"。 诊断 不断监测电机是否存在错误。 这些错误包括: 错误001:霍尔传感器未连接; 错误002:霍尔传感器短路; 错误004:电机无法旋转(可能原因:电机相位断开、MOSFET故障、运算放大器故障、电机堵塞。
直接上干货,今天聊聊怎么在Simulink里调教BLDC电机的FOC控制。这玩意儿就像给电机装了个智能导航,让转子磁场和定子磁场始终保持90度夹角,扭矩输出直接拉满。
BLDC直流无刷电机FOC控制 在Matlab/Simulink中实现了无刷直流电机的磁场定向控制FOC,整个FOC架构包括: 1、估计:根据霍尔传感器信号估计转子位置、角度和电机速度; 2、诊断:执行错误检测,如霍尔传感器未连接、电机阻塞、MOSFET故障; 3、控制管理器:管理控制模式(电压、速度、扭矩)之间的转换; 4、FOC算法:实施FOC策略; 5、控制类型管理器:管理换向、正弦和FOC控制类型之间的转换; FOC(磁场定向控制)算法,具有以下3种控制模式: 电压模式:在此模式下,控制器向电机施加恒定电压。 速度模式:在此模式下,闭环控制器通过拒绝施加到电机的任何干扰(电阻负载)来实现输入速度目标。 扭矩模式:在此模式下,实现输入扭矩目标。 当扭矩目标为"0"时,该模式启用电机"空转"。 诊断 不断监测电机是否存在错误。 这些错误包括: 错误001:霍尔传感器未连接; 错误002:霍尔传感器短路; 错误004:电机无法旋转(可能原因:电机相位断开、MOSFET故障、运算放大器故障、电机堵塞。
先说说最刺激的霍尔信号处理。三路霍尔传感器信号用Simulink的Rising Edge Detector抓取跳变沿,不过实测发现工业现场干扰太多,直接上这个得翻车。我的解决办法是加了个滑动窗口滤波器:
matlab
function theta = Hall2Angle(hallA, hallB, hallC)
persistent lastHall;
if isempty(lastHall)
lastHall = [0 0 0];
end
% 状态突变检测
if sum(abs([hallA hallB hallC] - lastHall)) > 1
% 触发卡尔曼滤波
theta = KalmanFilter([hallA, hallB, hallC]);
else
theta = lastTheta + deltaT*speed; % 插值补偿
end
lastHall = [hallA hallB hallC];
end这段代码的精髓在于处理霍尔信号的抖动问题。当检测到信号突变时启动卡尔曼滤波,平稳运行时用速度积分插值,实测角度误差从±15度降到了±3度以内。
控制模式切换才是真正的魔法时刻。遇到过最坑爹的情况是速度环切扭矩环时电机突然抽搐,后来发现是积分项没做抗饱和。现在切换时强制清空积分器:
simulink
% Control Mode切换逻辑
if strcmp(newMode, 'Torque') && strcmp(oldMode, 'Speed')
reset(pidController);
setCurrentLimit(ratedCurrent * 1.2); % 允许短时过载
endFOC核心算法就是个坐标变换套娃。不过别小看这个Clarke/Park变换,调不好谐波能让你怀疑人生。最近发现个骚操作------在电流环里加陷波滤波器:
matlab
function [Id, Iq] = CurrentController(Ialpha, Ibeta, theta)
% Park变换
Iq = Ialpha * sin(theta) - Ibeta * cos(theta);
Id = Ialpha * cos(theta) + Ibeta * sin(theta);
% 专治PWM开关噪声
persistent notchedIq;
if isempty(notchedIq)
notchedIq = dsp.NotchPeakFilter('Bandwidth',0.1,'CenterFrequency',16e3/(2*pi));
end
Iq = notchedIq(Iq);
end诊断模块绝对比女朋友还敏感。上次实验室师弟忘记接霍尔线,直接触发Error 001。不过最头疼的是Error 004(电机卡死),得用排除法:先用万用表怼电机线看有没有断相,再用电流环注入测试信号判断MOSFET是否暴毙。Simulink里内置了硬件诊断触发机制:
simulink
if (abs(Iq) > faultThreshold) && (speed < 0.1) && (voltage > 50)
triggerFault(004);
disablePWM();
end调参时有个玄学现象------早上调的参数下午就不好使。后来发现是实验室空调导致电机温升变化,电阻参数漂了。现在用在线参数辨识,每半小时自动更新电机参数:
matlab
function updateMotorParameters()
% 注入高频小信号
injectSignal(0.1*sin(2*pi*500*t));
% 最小二乘辨识
R = lscov(voltageSamples, currentSamples);
L = estimateInductance(crossCorrelation);
% 热补偿模型
if temp > 80
R = R * (1 + 0.00393*(temp-25));
end
end玩FOC就像谈恋爱,得懂电机的脾气。扭矩模式空转时别急着调参数,先观察反电动势波形是否圆润。速度环震荡多半是前馈没加够,电流环振铃可能是死区补偿过头了。记住,好的控制不是参数多漂亮,而是鲁棒性够强------拿水杯泼电机它还能稳如老狗才是真功夫。