1、问题定义
假设有两组点云:
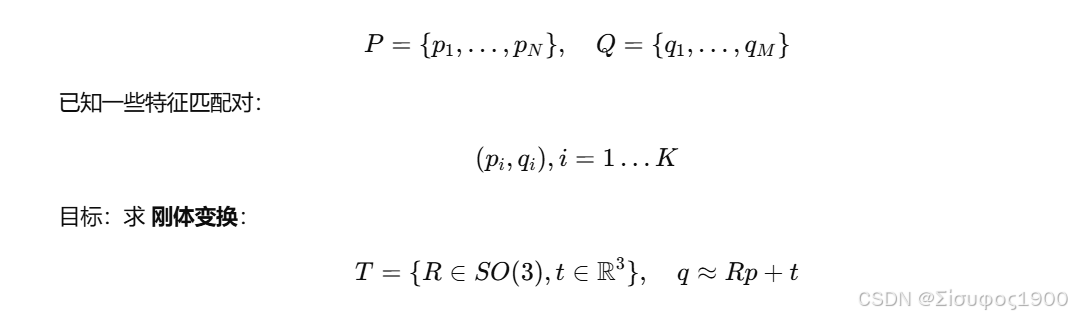
2、数学原理
Step 1:RANSAC
-
随机选 3 个对应点对 (pi,qi)(p_i,q_i)(pi,qi)
-
用 SVD 求解当前候选刚体变换 (R,t)(R,t)(R,t)
-
计算 所有匹配点误差 :

4.判断 inlier:

5.保存 inlier 数最多的 RANSAC 结果
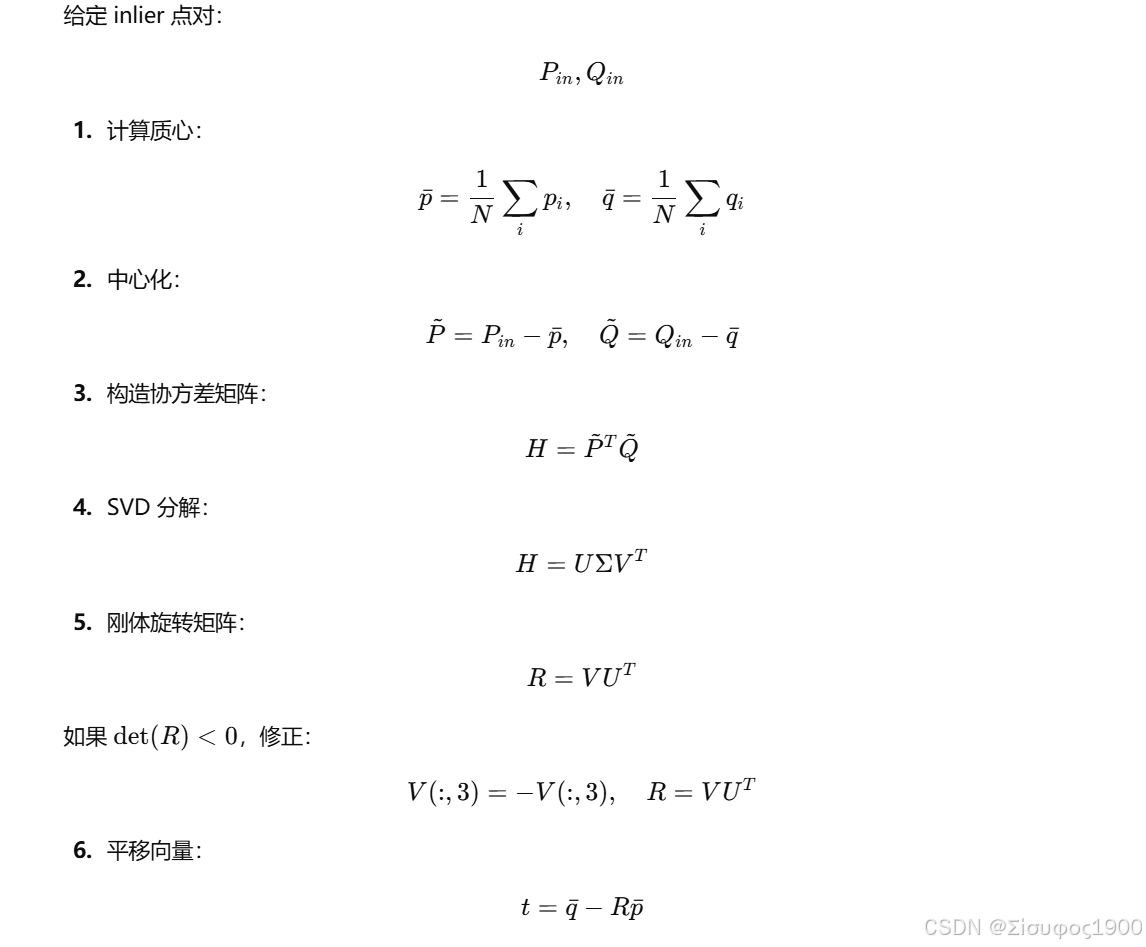
Step 2:SVD 刚体求解(Kabsch 算法)
3、PCL 对应关系
| MATLAB 逻辑 | PCL 对应类 |
|---|---|
| 随机选 3 个匹配 | SampleConsensusModelRegistration |
| 误差判断 inlier | SACSegmentation |
| SVD 求 R,t | TransformationEstimationSVD |
| 全 inlier 精修 | estimateRigidTransformationSVD |
4、MATLAB 完整实现
cpp
clc; clear; close all;
%% 模拟点云
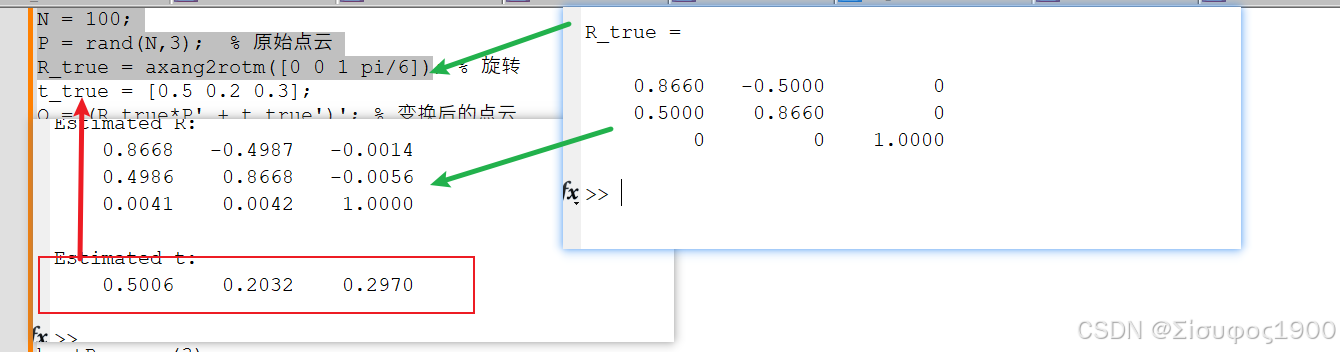
N = 100;
P = rand(N,3); % 原始点云
R_true = axang2rotm([0 0 1 pi/6]); % 旋转
t_true = [0.5 0.2 0.3];
Q = (R_true*P' + t_true')'; % 变换后的点云
Q = Q + 0.01*randn(size(Q)); % 添加噪声
%% 假设已经有特征匹配,这里全匹配
matches = [(1:N)' (1:N)'];
%% RANSAC 参数
maxIter = 200;
threshold = 0.02;
bestInliers = [];
bestR = eye(3);
bestT = zeros(1,3);
for iter = 1:maxIter
% 随机 3 个匹配点
idx = randperm(N,3);
Pi = P(matches(idx,1),:);
Qi = Q(matches(idx,2),:);
% SVD 求解旋转和平移
cp = mean(Pi,1); cq = mean(Qi,1);
X = Pi - cp; Y = Qi - cq;
H = X' * Y;
[U,~,V] = svd(H);
R = V*U';
if det(R)<0
V(:,3) = -V(:,3);
R = V*U';
end
t = cq - (R*cp')';
% 计算误差
Qp = (R*P(matches(:,1),:)' + t')';
errs = sqrt(sum((Qp - Q(matches(:,2),:)).^2,2));
inliers = find(errs < threshold);
if length(inliers) > length(bestInliers)
bestInliers = inliers;
bestR = R;
bestT = t;
end
end
fprintf('RANSAC inliers = %d\n', length(bestInliers));
%% 用所有 inliers 再精确求解一次 SVD
Pi = P(matches(bestInliers,1),:);
Qi = Q(matches(bestInliers,2),:);
cp = mean(Pi,1); cq = mean(Qi,1);
X = Pi - cp; Y = Qi - cq;
H = X' * Y;
[U,~,V] = svd(H);
R_final = V*U';
if det(R_final)<0
V(:,3) = -V(:,3);
R_final = V*U';
end
t_final = cq - (R_final*cp')';
disp('Estimated R:'); disp(R_final);
disp('Estimated t:'); disp(t_final);
%% 可视化
figure; hold on; axis equal;
scatter3(P(:,1),P(:,2),P(:,3),36,'b','filled');
scatter3(Q(:,1),Q(:,2),Q(:,3),36,'r','filled');
% RANSAC 对齐后
Q_aligned = (R_final*P' + t_final')';
scatter3(Q_aligned(:,1),Q_aligned(:,2),Q_aligned(:,3),36,'g');
legend('Source P','Target Q','Aligned P');
title('RANSAC + SVD Point Cloud Registration');
xlabel X; ylabel Y; zlabel Z;
grid on;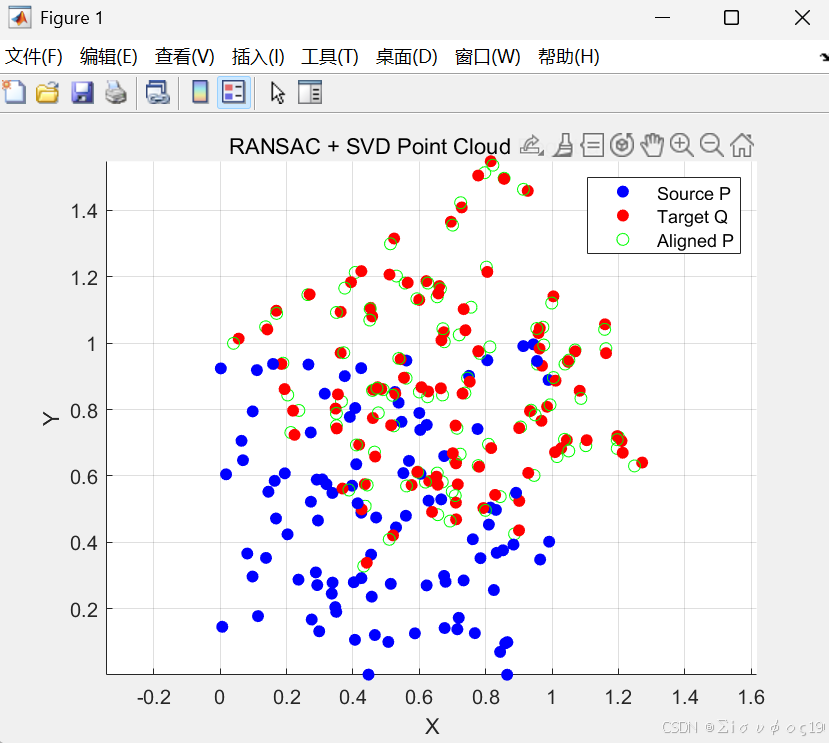
5、流程
cpp
┌──────────────┐
│ 输入特征匹配 │
└──────┬──────┘
│
┌───────────▼────────────┐
│ RANSAC 主循环 │
└───────────┬────────────┘
│
┌─────────────▼──────────────┐
│ 随机选 3 对匹配样本 (Pi,Qi) │
└─────────────┬──────────────┘
│
┌─────────────▼──────────────┐
│ SVD 求解当前模型 (R,t) │
└─────────────┬──────────────┘
│
┌─────────────▼──────────────┐
│ 计算所有匹配误差 & Inlier │
└─────────────┬──────────────┘
│
┌────────▼───────────┐
│ 更新最佳模型 (max inlier) │
└────────┬───────────┘
│
┌─────────▼─────────┐
│ 使用所有 inlier 重新 SVD │
└─────────┬─────────┘
│
┌───────▼────────┐
│ 输出最终 R, t │
└─────────────────┘