基于NGSIM数据的wiedemann99跟驰模型标定 Including: 1. Code by Matlab; 2. 拟合优度函数(RMSPE)由SpaceHeadway & velocity组成; 3. 自己编写的IPSO(改进粒子群算法)进行求解。
最近在研究基于NGSIM数据对Wiedemann99跟驰模型进行标定,这里和大家分享下我的一些实践过程和心得。
一、整体思路
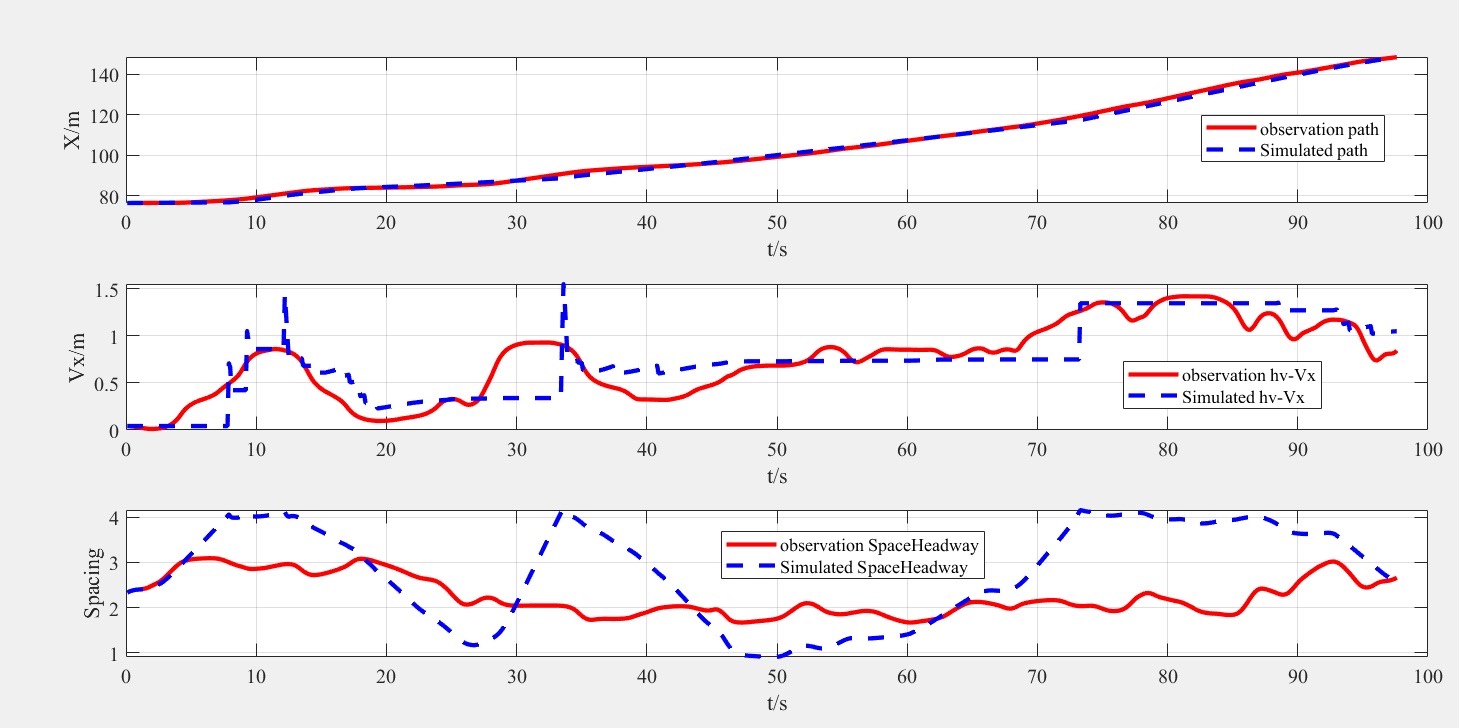
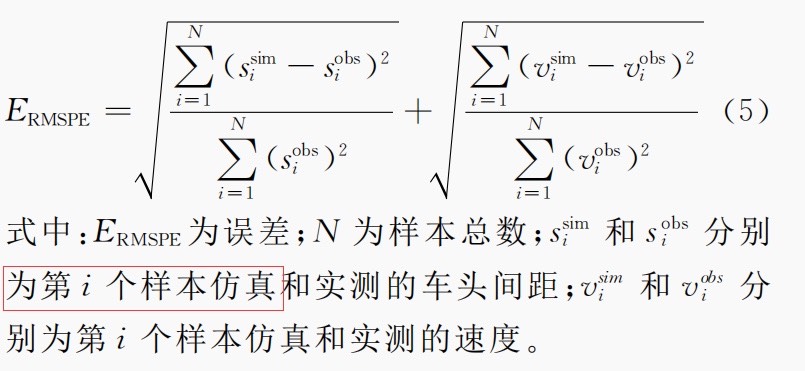
我们要利用NGSIM数据,通过特定的方法对Wiedemann99跟驰模型进行参数标定。在这个过程中,用到了Matlab编写代码,以拟合优度函数(RMSPE)作为评判标准,该函数由SpaceHeadway(间距)和velocity(速度)组成,并且采用自己编写的IPSO(改进粒子群算法)来求解模型参数。
二、Matlab代码实现
1. 数据读取与预处理
matlab
% 假设NGSIM数据存储在一个文本文件中,格式为每一行包含车辆ID、时间、位置、速度等信息
data = readtable('ngsim_data.txt');
% 提取我们需要的间距和速度信息
spaceHeadway = data.SpaceHeadway;
velocity = data.Velocity; 这里通过readtable函数读取NGSIM数据文件,将其存储为表格形式,方便后续提取特定的列数据,也就是我们需要的间距和速度信息,为后续计算拟合优度函数做准备。
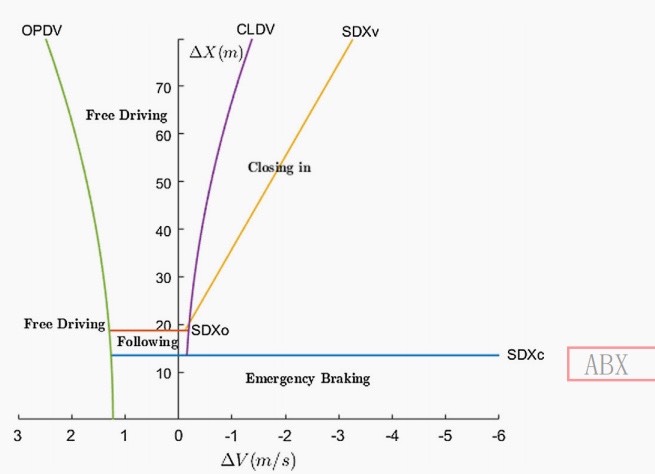
2. 定义Wiedemann99跟驰模型
matlab
function acceleration = wiedemann99Model(spaceHeadway, velocity, params)
% params包含模型需要标定的参数
a = params(1);
b = params(2);
c = params(3);
% Wiedemann99模型公式,这里假设具体公式为以下形式
acceleration = a * velocity + b * spaceHeadway + c;
end这个函数定义了Wiedemann99跟驰模型,输入间距、速度以及模型参数,返回车辆的加速度。在实际模型中,参数a、b、c是我们需要通过标定确定的。
3. 拟合优度函数(RMSPE)
matlab
function rmspe = calculateRMSPE(params, spaceHeadway, velocity, observedAcceleration)
predictedAcceleration = wiedemann99Model(spaceHeadway, velocity, params);
% 计算预测加速度和观测加速度的相对百分比误差
errors = (predictedAcceleration - observedAcceleration)./ observedAcceleration;
rmspe = sqrt(mean(errors.^2));
end这个函数用来计算拟合优度RMSPE。首先根据当前的参数params通过wiedemann99Model函数得到预测加速度,然后计算预测加速度和观测加速度之间的相对百分比误差,最后对这些误差求均方根得到RMSPE。
4. 改进粒子群算法(IPSO)
matlab
function [bestParams, bestRMSPE] = IPSO(spaceHeadway, velocity, observedAcceleration, numParticles, numIterations)
% 初始化粒子位置和速度
positions = rand(numParticles, 3);
velocities = zeros(numParticles, 3);
personalBestPositions = positions;
personalBestRMSPE = inf(numParticles, 1);
globalBestPosition = [];
globalBestRMSPE = inf;
for iter = 1:numIterations
for i = 1:numParticles
currentRMSPE = calculateRMSPE(positions(i, :), spaceHeadway, velocity, observedAcceleration);
if currentRMSPE < personalBestRMSPE(i)
personalBestRMSPE(i) = currentRMSPE;
personalBestPositions(i, :) = positions(i, :);
end
if currentRMSPE < globalBestRMSPE
globalBestRMSPE = currentRMSPE;
globalBestPosition = positions(i, :);
end
end
% 更新粒子速度和位置
for i = 1:numParticles
r1 = rand(1, 3);
r2 = rand(1, 3);
velocities(i, :) = 0.7 * velocities(i, :) + 1.5 * r1.* (personalBestPositions(i, :) - positions(i, :)) + 1.5 * r2.* (globalBestPosition - positions(i, :));
positions(i, :) = positions(i, :) + velocities(i, :);
end
end
bestParams = globalBestPosition;
bestRMSPE = globalBestRMSPE;
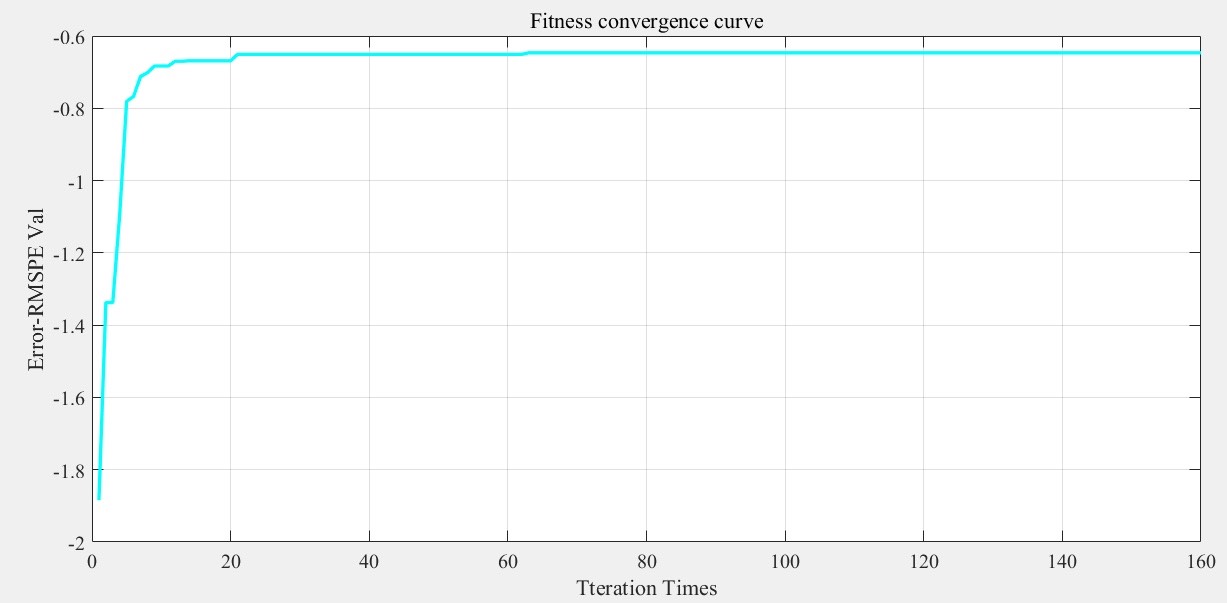
end这是改进粒子群算法的实现。开始时初始化粒子的位置和速度,每个粒子代表一组模型参数。在每次迭代中,计算每个粒子对应的RMSPE,更新粒子的个人最优位置和全局最优位置。然后根据粒子群算法的公式更新粒子的速度和位置,最终返回最优的参数和最小的RMSPE。
三、总结
通过以上Matlab代码实现,结合NGSIM数据,利用IPSO算法对Wiedemann99跟驰模型进行标定,以RMSPE作为拟合优度函数来评估模型的准确性。在实际应用中,还可以进一步优化代码和算法,比如对IPSO算法的参数进行更细致的调整,或者尝试不同的数据预处理方法,以提高模型标定的精度和效率。希望这篇博文对同样在研究相关内容的小伙伴有所帮助,大家有任何问题或者想法欢迎交流讨论。
基于NGSIM数据的wiedemann99跟驰模型标定 Including: 1. Code by Matlab; 2. 拟合优度函数(RMSPE)由SpaceHeadway & velocity组成; 3. 自己编写的IPSO(改进粒子群算法)进行求解。