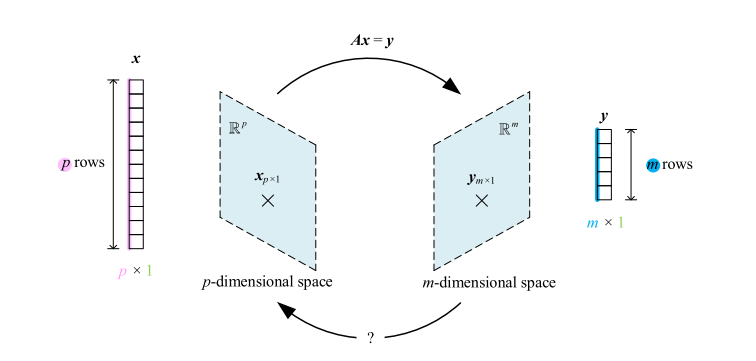
(图1 来自《线性代数不难》)
这张图其实把矩阵乘法的本质 画得很直白:它不是"神秘的算式",而是一个把向量从一个空间线性映射到另一个空间的规则。
1)先读图:维度在说什么?
-
左边是输入向量 x :标着 p rows,所以
-
右边是输出向量 y :标着 m rows,所以
-
中间写着 Ax=y :说明矩阵 A 必须把
的向量送到
因此 A 的尺寸被"维度匹配"强制确定为:
这就是为什么矩阵乘法要求"内维相等":(m×p)(p×1)=(m×1)。
2)矩阵乘法的三个等价理解(都对应同一个 y=Ax)
视角 A:行·列(点积)= 输出每一行
把 A 看成由 m 行组成:
那么输出 y 的第 i 个分量就是:
也就是:每一行和 x 做一次点积,得到一个标量;做 m 次得到 m 维的 y。
视角 B:列的线性组合(最直观)
把 A 按列拆开:
把 x 写成分量 ,则
这句话非常关键:
矩阵乘向量 = 用 x 的各个分量当系数,把 A 的各列加权相加。
所以 A 的每一列都像一个"输出方向的基向量/特征图",x 决定你把这些列混合成什么样的 y。
视角 C:函数/变换:线性映射
图中两块"斜着的平面"写着 和
,强调的是:
-
输入空间的点 x
-
经过 A 这个规则
-
变成输出空间的点 y
而且是"线性"的:满足
这就是为什么矩阵能表示:旋转、缩放、剪切、投影、把 2D 嵌到 3D、把高维压到低维......(取决于 m,p 和 A 的结构)。
3)图里底部那个"?"箭头在暗示什么?
它像是在问:能不能从 y 反推回 x?
-
如果 A 是 方阵 (m=p)且 可逆:就有
-
如果 不是方阵 或 不可逆 :通常不能唯一反推。这时常见做法是:
-
最小二乘:找一个 x 让 ∥Ax−y∥ 最小
-
伪逆:
-
这就是机器学习/信号处理里"拟合""回归""重建"背后的线性代数版本。
4)一个小数值例子,把图走一遍
让 p=2,m=3(从 映射到
):
则
-
行·列视角:三行分别点积得到 y1,y2,y3
-
列组合视角:
两种理解算出来完全一致。
矩阵乘法的几何视角
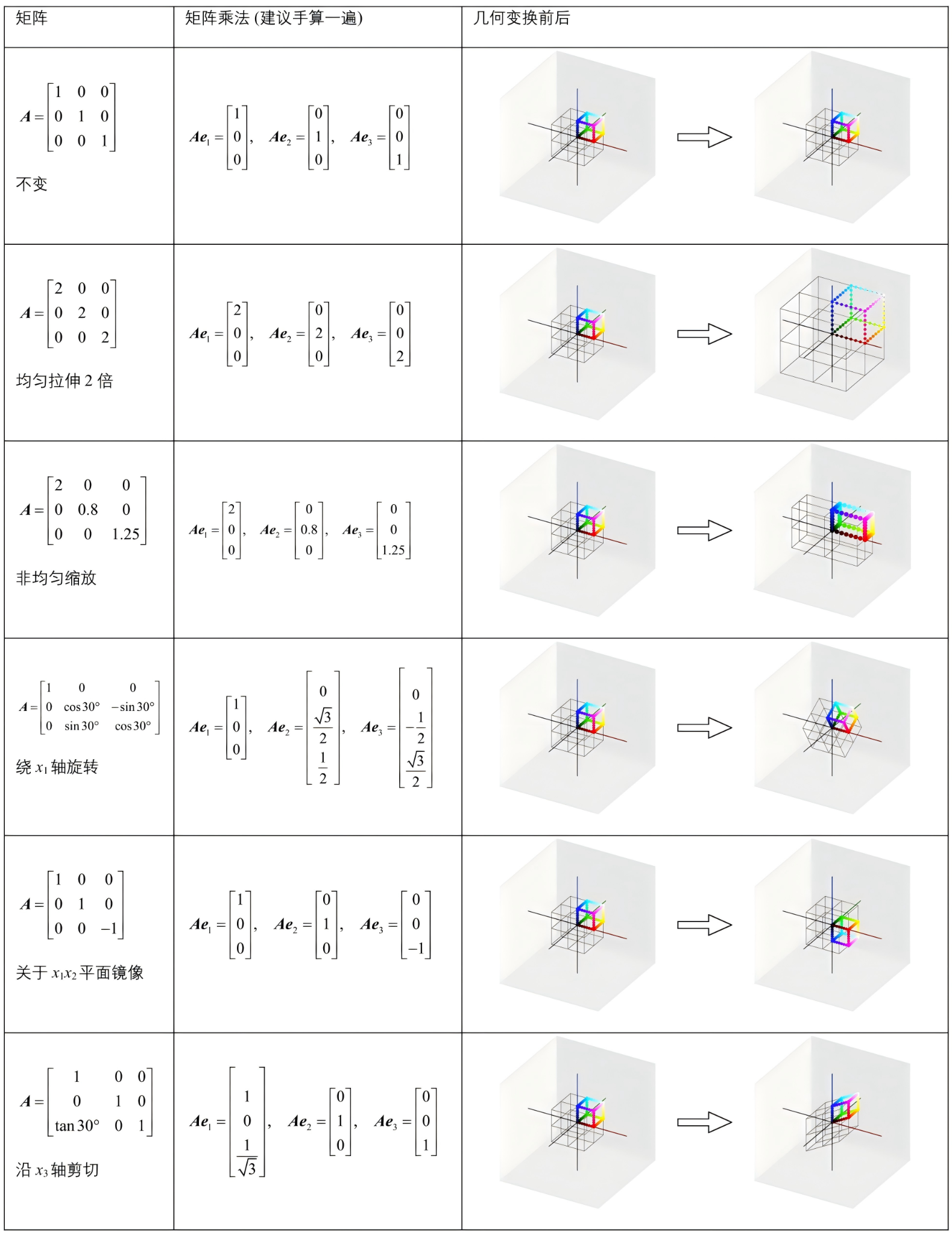
(图2 来自《线性代数不难》)
这张图想表达的核心只有一句话:
矩阵乘法 y=Ax 的几何意义:线性变换把"整个空间里的所有向量/点"一起搬家;而你只要看清楚它把三个基向量 e1,e2,e3 变成了什么,就等于看清了整个变换。
1)为什么"看 "就够了?
在 3D 里任意向量都能写成
由于线性变换满足"可加+可提系数",
而 正好就是 矩阵 A 的第 i 列:
所以在图中间看到的"建议手算一遍:"就是在做这件事:
把坐标轴的三根单位箭头(基向量)变换后的位置算出来,整个空间的形变就定了。
2)几何上到底发生了什么?
可以把左边那个小彩色立方体当成**"单位立方体"**(或者一小块网格)。线性变换会把它变成一个平行六面体:
-
列向量
-
单位立方体的 8 个顶点会被一起送到新位置,所以整体形状被拉伸/旋转/剪切/翻转。
记忆法:列 = 新轴 ,立方体 = 被变形的空间小块。
3)逐行对应图里的 6 种变换
下面每一行都在说:"三根基向量被送到哪里" → "几何效果是什么"。
(1) 单位矩阵 :不变
三根轴方向完全没动,所以立方体不变。
(2) :均匀拉伸 2 倍
三根轴都变长 2 倍、方向不变,所以是整体放大 。
体积缩放因子是 det(A)=2⋅2⋅2=8:立方体体积变 8 倍。
(3) 对角矩阵 diag(2,0.8,1.25):非均匀缩放
三根轴分别按不同倍数伸缩 → 长方体拉伸 (各向异性缩放)。
体积缩放 det(A)=2×0.8×1.25=2:体积变 2 倍,但形状比例变了。
(4) 绕 x1 轴旋转(图里是 30∘)
矩阵大致是
它的效果是:
-
-
所以右图看到的是:立方体整体绕 x1 轴转过去,但"长度、角度(正交性)、体积"都保持(旋转矩阵 det=1)。
(5) 关于 x1x2 平面镜像(等价:x3 取反)
这表示:
-
x1,x2 不变
-
x3 方向翻到相反
几何上是上下翻转(镜像)。注意它会改变"朝向"(右手系变左手系),因此 det(A)=−1。
(6) 沿 x3 方向剪切(图里用 tan30∘)
图里是
算基向量:
-
-
几何直觉:不同的 x1 位置,会被额外抬高/压低一些 x3 ,于是立方体被"斜着推"成平行六面体。
这种剪切通常 det(A)=1:体积不变,但角度变了(不再正交)。
4)一眼看懂矩阵几何意义的"快法"
给你一个非常实用的流程(和图中间那列完全一致):
-
看列向量 :第 1、2、3 列分别是
-
判断三根新轴:长度(缩放)、方向(旋转/反射)、是否倾斜(剪切)
-
判断体积与朝向:看 det(A)
-
∣det∣>1:体积放大;∣det∣<1:体积缩小
-
det<0:发生镜像(朝向翻转)
-
我们继续把矩阵乘法的几何视角讲得更"能一眼看出来"。
5)同一个 Ax,有两种等价的"几何画法"
(5.1) 列视角(column picture):看"新坐标轴 / 新基向量"
这是图里用的视角:
-
A 的第 1、2、3 列分别就是
-
它们告诉你:原来坐标轴的单位箭头被变到哪里
-
所以单位立方体会被拉成由这三根向量张成的平行六面体
一句话总结:
列 = 变换后的轴;立方体怎么变形由列决定。
(5.2) 行视角(row picture):看"输出每个分量怎么测量(投影/点积)"
把 A 写成行:
那么
几何意义是:每一行 都像一个"探针方向",输出的第 i 个坐标就是把 x 沿这个方向做一次点积(某种测量/投影)。
一句话总结:
行 = 怎么把输入"测成"输出坐标。
这两个视角讲的是同一个 Ax,只是"看法"不同:
-
列视角更像"把空间变形"
-
行视角更像"对输入做测量得到输出"
6)矩阵乘矩阵 BA:为什么是"先 A 后 B"?
这是几何里最关键的一条:
所以 右边先作用:
-
先用 A 把 x 从原空间变到中间形状
-
再用 B 在新形状上继续变
这也是为什么线性变换的"组合"用乘法表示。
更直观的列视角说法:
-
A 的列给出
-
再乘 B:
-
也就是:先把轴变到
所以矩阵乘法不是"乱算",而是"变换的叠加"。
7)det(A) 的几何意义:体积缩放 + 是否翻面
你已经看到:
-
均匀缩放 2 倍:det=8
-
镜像:det=−1
-
剪切常常:det=1
更通用地:
-
∣det(A)∣ = 体积缩放倍数(3D 是体积,2D 是面积)
-
det(A)>0:保持朝向(右手系还是右手系)
-
det(A)<0:发生镜像,朝向翻转(右手系变左手系)
一个非常实用的"肉眼判断":
-
三根列向量越"张得开",∣det∣ 越大
-
三根列向量越"挤到一个平面里",∣det∣ 越接近 0
-
如果三根列向量共面/共线,det=0:体积被压扁成 0(不可逆)
8)秩(rank)与"压扁":从 3D 变 2D/1D/0D 的几何解释
秩 = 变换后能留下的维度(输出子空间的维数)。
在 3D 中:
-
rank = 3:立方体变成某个"有体积"的平行六面体(det≠0)
-
rank = 2:立方体被压成一个平行四边形"薄片"(体积 0)
-
rank = 1:压成一条线段
-
rank = 0:全变到原点
从列视角看最直观:
-
rank 就是
-
三列不共面 → rank 3
-
三列共面但不共线 → rank 2
-
三列共线 → rank 1
-
9)当 m≠p:图一那种"从 p 维到 m 维"怎么理解?
这是图1 的延伸。
(9.1) m>p:升维(embedding)
比如 。几何上是:
-
一个 2D 平面被嵌进 3D
-
变换结果仍然只能落在某个 2D 子空间里(rank ≤ 2)
(9.2) m<p:降维(projection / measurement)
比如 。几何上是:
-
你把 3D 点"测量"成 2 个数字(行视角非常贴切)
-
必然丢信息,所以一般不能唯一反推
这也解释了图1 底部那个"?":
反推需要可逆,但降维或 rank 不满时做不到,只能做最小二乘/伪逆那类"最接近"的逆。
10)把那张表总结成一句"万能口诀"
矩阵乘法的几何本质:把基向量送到新位置(列),从而决定整个空间如何变形;组合变换就是矩阵相乘;体积与翻面由行列式控制;压扁程度由秩控制。