前言:通过该篇文章,重新梳理,理解系统标定参数的含义,及标定过程
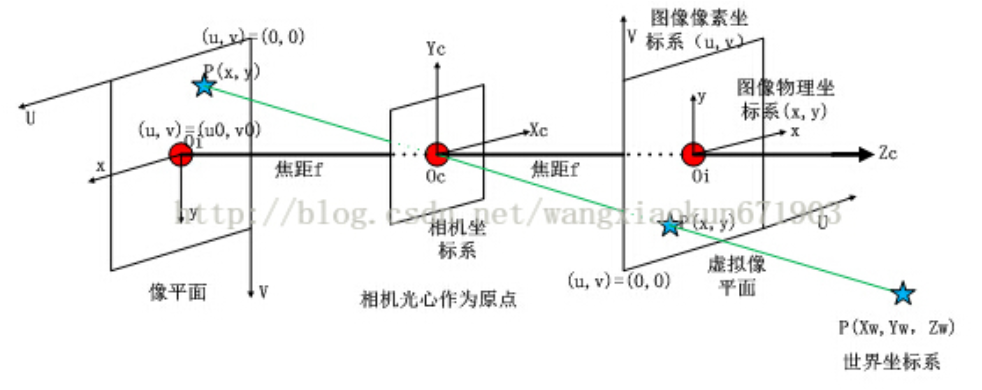
针孔成像模型
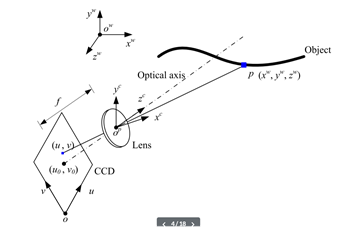
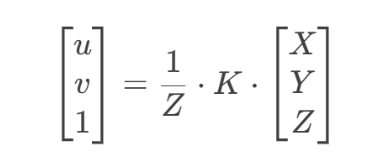
假设空间中物体任意一点在世界坐标系下为p(x,y,z) ,在摄像机成像平面上的投影坐标为 (u,v),则实际上,这一转换过程可以描述为:
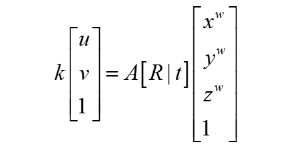
其中:K 为缩放因子;R\|t 表示外部参数:
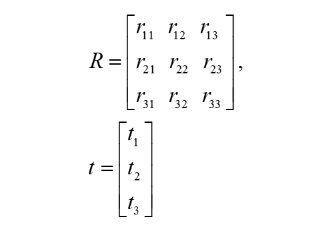
R是一个三行三列的旋转矩阵,而t代表了一个平移向量。它们共同表示了三维世界中点到相机坐标系统中的关系。接着,相机本身的内部参数矩阵A会将坐标映射到相机的二维成像平面上,最终得到世界相应的二维图像坐标。
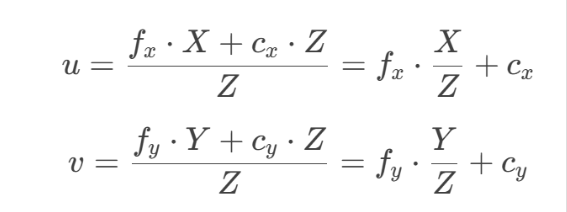
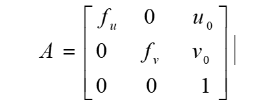 其中,fu和 fv分别表示相机在 u 轴和v 轴方向上的有效焦距;(u,v)则是主点坐标,即相机光轴与图像平面的交点。
其中,fu和 fv分别表示相机在 u 轴和v 轴方向上的有效焦距;(u,v)则是主点坐标,即相机光轴与图像平面的交点。
常见的系统参数标定方法是张正友方法,该方法利用多个不同角度拍摄的棋盘格图像,通过单应性矩阵(Homography Matrix)估计摄像机的内参、外参和畸变参数,并采用非线性优化方法提升精度。
系统标定用来确定系统的内外参数,其中内参描述相机内部属性的参数,包括焦距、主点(光学中心)坐标、畸变系数等。输出值有焦距(fu,fv),(u,v),径向畸变参数k1,k2,k3;切向畸变系数 p1,p2; 外参描述相机在世界坐标系中的位置和姿态的参数,通常包括旋转矩阵和平移向量。
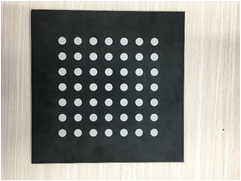
标定板用来辅助系统标定,通常假设标定点平面z=0;以左上角第一个圆心为世界坐标系原点位置。系统外参确认了相机坐标系与世界坐标系的对应关系,其两个坐标系单位都还是mm。
坐标系转换
% 世界 -> 相机
points_cam = (R * points_world.' + t); % 3×N
从相机坐标系到像素坐标系:
在单目结构光系统中,当已知相机和投影仪在同一世界坐标系外参时,就可以通过下式代码得到两个设备的相对关系矩阵。
matlab
% ================== 已知外参 ==================
% 相机外参 (world -> camera)
rvec_cam = [2.1719 , 2.1701 , -0.0352];
tvec_cam = [-72.6580;
-125.2286;
422.8802]; % mm
% 投影仪外参 (world -> projector)
rvec_proj = [ -2.0823 , -2.1271 , 0.0308];
tvec_proj = [ -132.9652;
-231.0133;
502.7903]; % mm
% ================== 计算旋转矩阵 ==================
R_cam = vision.internal.calibration.rodriguesVectorToMatrix(rvec_cam);
R_proj = vision.internal.calibration.rodriguesVectorToMatrix(rvec_proj);
% ================== 计算 projector w.r.t camera ==================
% R_pc = R_proj * R_cam'
R_pc = R_proj * R_cam';
% T_pc = -R_pc * tvec_cam + tvec_proj
T_pc = -R_pc * tvec_cam + tvec_proj;
% ================== 计算 camera w.r.t projector ==================
% 旋转矩阵取转置
R_cp = R_pc';
% 平移向量逆变换
T_cp = -R_pc' * T_pc;
% Rodrigues 旋转向量
rvec_cp = vision.internal.calibration.rodriguesMatrixToVector(R_cp);
% ================== 输出 ==================
disp('R_ex (camera w.r.t projector):');
disp(R_cp);
disp('T_ex (mm):');
disp(T_cp);
disp('rvec_ex (rad):');
disp(rvec_cp);