相机十参数标定
近景摄影测量 Close-range Photogrammetry
- 九参数f x0 y0 k1 k2 p1 p2 α β
- 十参数c x0 y0 K1 K2 K3 P1 P2 b1 b2
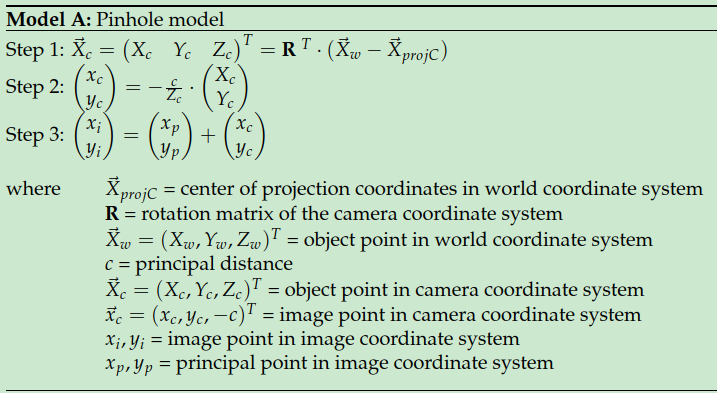
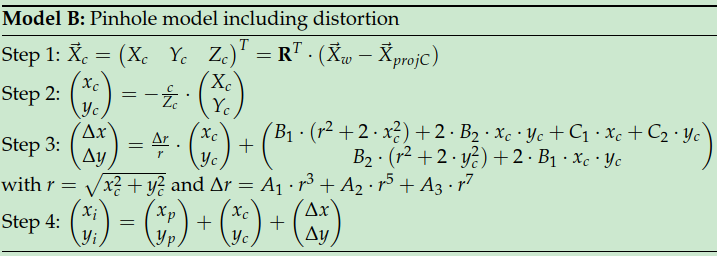
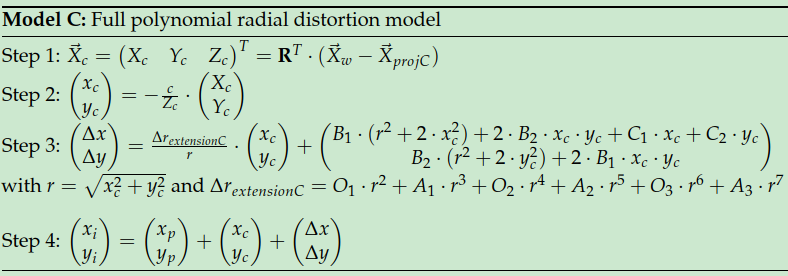
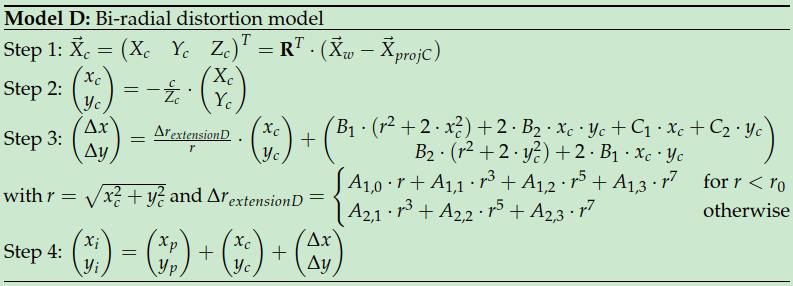
A Bi-Radial Model for Lens Distortion Correction of Low-Cost UAV Cameras
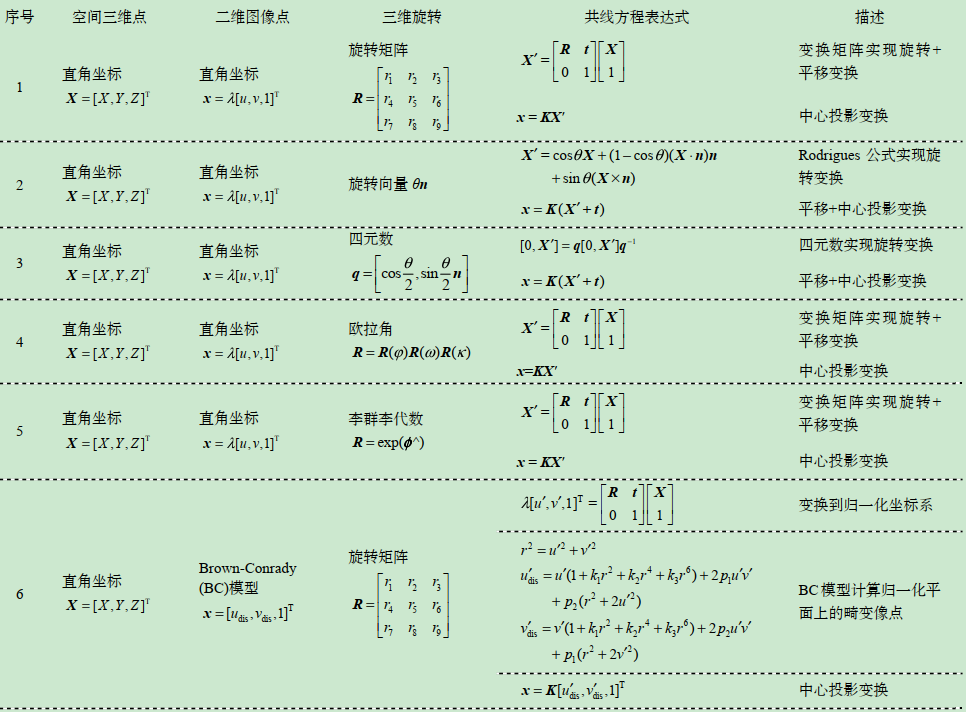
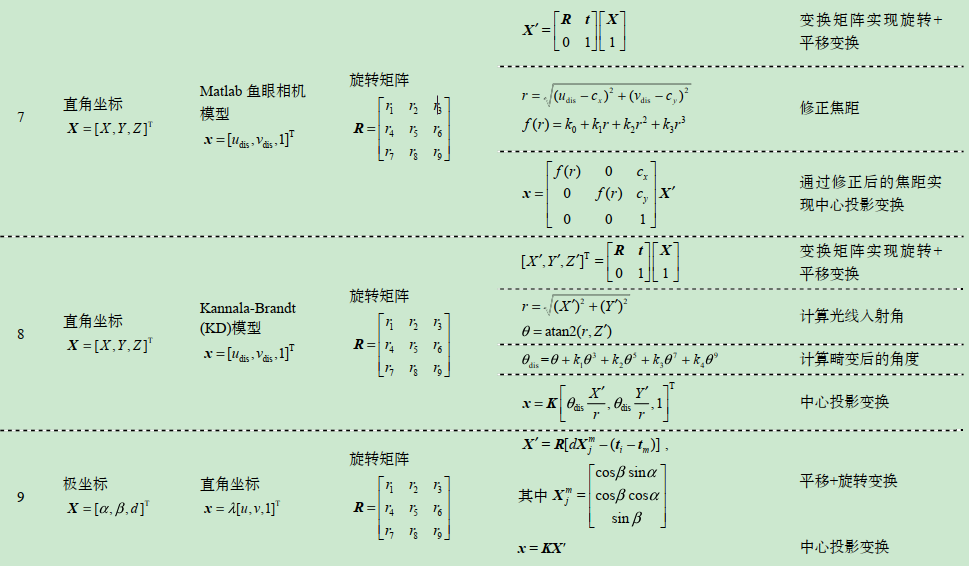
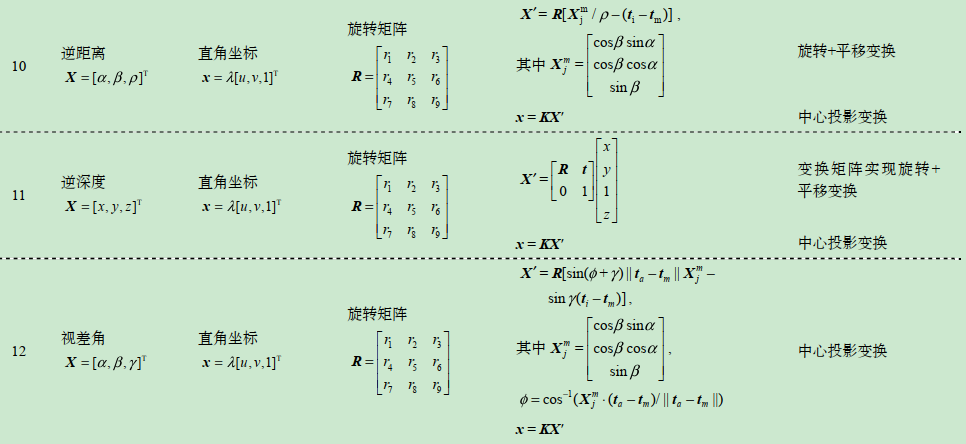
- 共线方程三要素关联性分析
非参数标定模型 Nonparametric Calibration Model
近景摄影测量 Close-range Photogrammetry
A Bi-Radial Model for Lens Distortion Correction of Low-Cost UAV Cameras
非参数标定模型 Nonparametric Calibration Model