- 脉冲宽度可控制电路
一、电路的核心目标
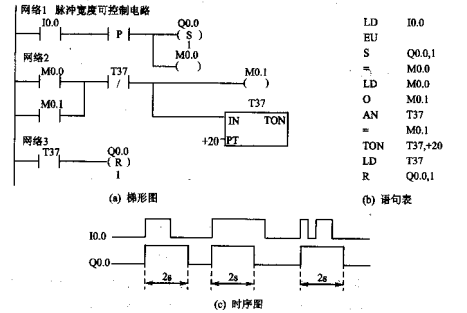
(图片摘自《现代电气控制及PLC应用技术》(王永华))
无论输入信号 I0.0的宽度是过窄(如一个瞬时触点)还是过宽(如持续接通),输出 Q0.0都只在 I0.0的上升沿 触发,并产生一个精确的、固定宽度(图中为2秒) 的脉冲。
关键约束 :如果 I0.0的两次上升沿间隔小于输出脉冲的宽度(2秒),则电路会忽略第二个及之后的上升沿,直到当前脉冲周期结束。这确保了输出脉冲的完整性和周期性。
二、梯形图逻辑分解(逐行分析)
整个电路可以看作一个"单稳态触发器",其工作流程如下:
- 触发阶段(检测上升沿并锁存):
- 当输入 I0.0从"0"变为"1"(上升沿)时,EU(上升沿脉冲)指令生效,使内部的中间继电器 M0.0接通一个扫描周期。
- M0.1的常开触点闭合,形成自锁 。这使得即使 I0.0的上升沿瞬间过去,M0.1线圈也能通过其自身的触点继续保持得电状态,直到被复位。
- M0.0的得电,同时启动了定时器 T37 。T37 被设置为 PT=20 ,由于时基是100ms,因此定时时间为 20 * 100ms = 2秒。
- 输出与保持阶段(产生固定宽度脉冲):
- M0.0的常开触点闭合后,为输出 Q0.0的置位(S)创造了条件。
- Q0.0的置位回路中,串接了 定时器 T37 的常闭触点 。在 T37 定时未到(2秒内)时,这个常闭触点是闭合的,因此 Q0.0被置位并保持为"1"(输出高电平脉冲)。
- Q0.0的状态还通过其自身的常开触点并联在 M0.0自锁回路上,进一步确保了整个触发逻辑在脉冲周期内的稳定性。
- 复位与关闭阶段(结束脉冲并复位系统):
- 当 T37 计时2秒到 ,其状态发生变化:
- T37 常闭触点断开 :切断了 Q0.0的置位回路。根据 PLC 的"复位优先"特性或线圈的失电逻辑,Q0.0被复位,输出脉冲结束。
- T37 常开触点闭合 :启动了一个复位链。T37 的常开触点闭合,使得 M0.0的复位(R)条件满足,M0.0线圈失电。M0.0失电后,其常开触点断开,这反过来又使得 T37 自身的计时输入断开,T37 被复位(其常开触点断开,常闭触点恢复闭合)。
- 至此,所有内部状态(M0.0, T37)和输出(Q0.0)都恢复到初始状态 ,电路准备就绪,可以响应下一个 I0.0的有效上升沿。
三、时序图解读(应对不同输入情况)
时序图清晰地展示了电路的三种典型工作情况:
- 情况A:输入脉冲宽度 > 2秒 。
- I0.0接通时间很长,但 Q0.0只在 I0.0的上升沿被触发,并严格输出2秒宽的脉冲后关闭,不受 I0.0仍处于接通状态的影响。
- 情况B:输入脉冲宽度 < 2秒(如瞬时脉冲) 。
- I0.0只是一个很窄的脉冲,但 Q0.0仍然被"展宽"为一个完整的2秒标准脉冲。这正是电路的核心功能。
- 情况C:输入脉冲间隔 < 2秒(过快触发) 。
- 在第一个 I0.0上升沿触发的2秒脉冲周期内,第二个 I0.0上升沿到来。此时,由于 M0.0仍处于自锁状态且 T37 正在计时,第二个上升沿无法再次触发 M0.0(M0.0已为"1"),因此被完全忽略 。Q0.0的脉冲宽度不受干扰。
四、总结与要点
- 功能本质 :这是一个基于定时器的单稳态脉冲发生器,输出脉冲宽度由定时器设定值(PT)唯一决定。
- 关键元件:
- EU指令:确保只在上升沿触发,抗干扰。
- M0.1自锁:将瞬时的上升沿转换为一个稳定的"触发周期"状态。
- 定时器 T37 :核心计时元件。其常闭触点控制脉冲宽度 ,其常开触点负责系统复位。
- S/R指令:实现对 Q0.0和 M0.0状态的可靠置位与复位。
- 可调性 :只需修改定时器 T37 的 PT 值,即可轻松调节输出脉冲 Q0.0的宽度(脉冲宽度 = PT * 时基)。
- 抗干扰性:电路能有效忽略在输出脉冲周期内到来的任何额外输入信号,保证了输出脉冲的完整性和确定性。
这个电路是 PLC 时序控制中的一个经典范例,广泛应用于需要将不规则按钮、传感器信号转换为标准控制脉冲的场合,如启动延时、单次动作控制等。