1. NDT 是什么?
Normal Distributions Transform(NDT)是由 Biber & Straßer (2003) 提出的 用于点云配准(scan matching) 的方法。
它是 ICP 的概率版,核心思想是:
将目标点云划分为网格,每个网格估计一个高斯分布,源点云点作为观测输入该高斯分布的概率。通过最大化整体概率来求刚体变换。
2. NDT 数学原理(最重要)
2.1 Step 1:把目标点云分为体素 (Voxel Grid)
每个 voxel(体素)内的点:
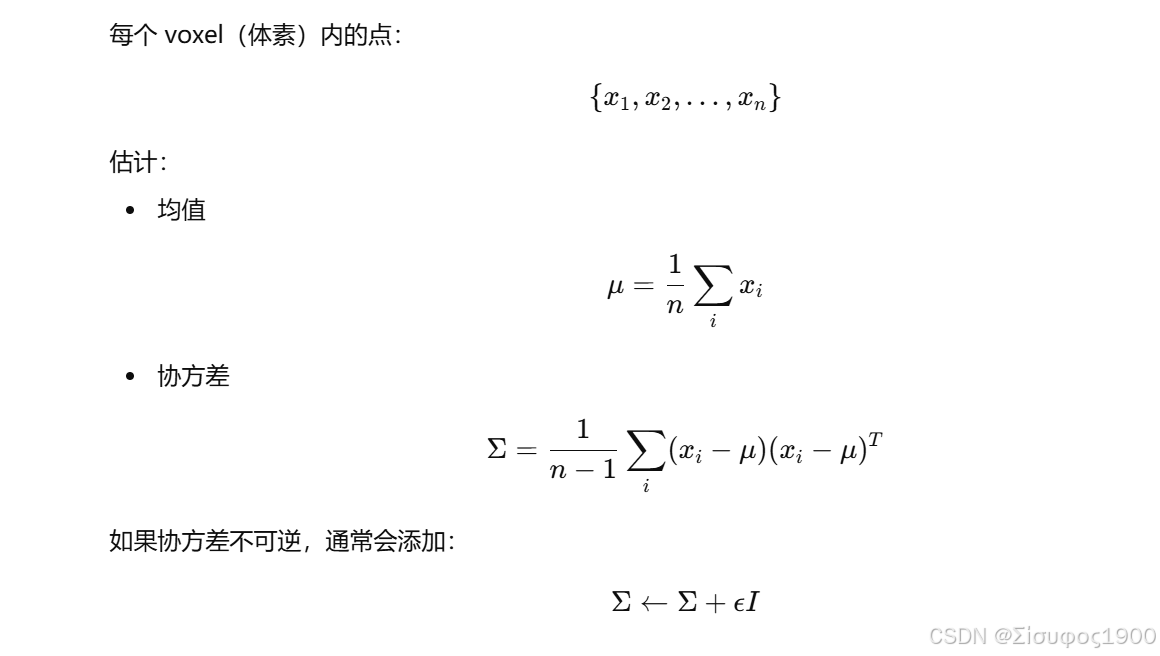
2.2 Step 2:使用高斯分布建模每个 voxel
对每个 voxel,我们有:

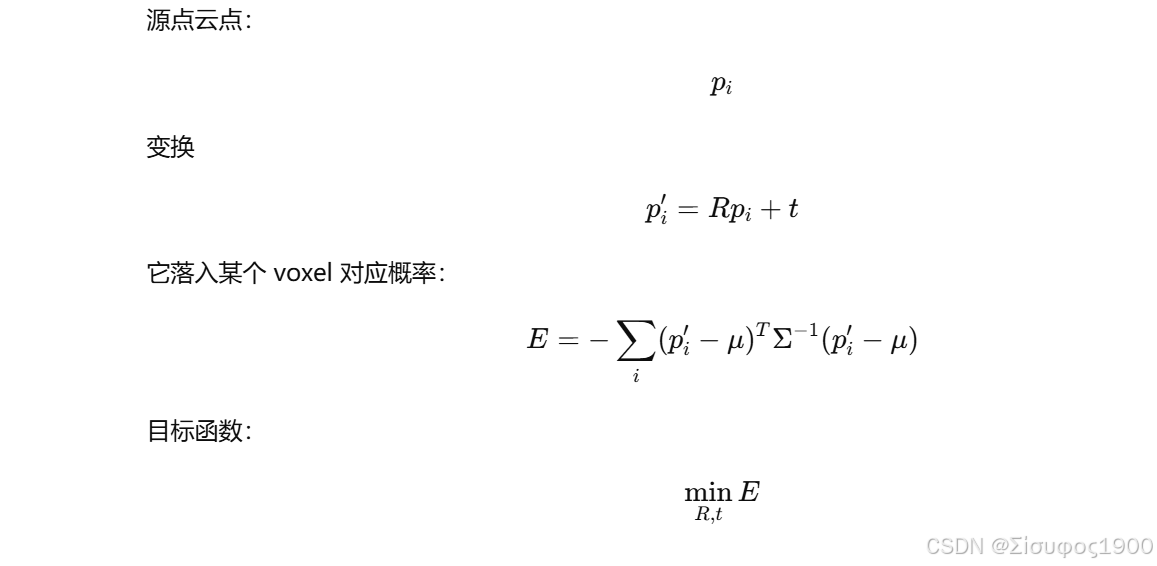
2.3 Step 3:源点云经过变换后最大化目标点云的概率
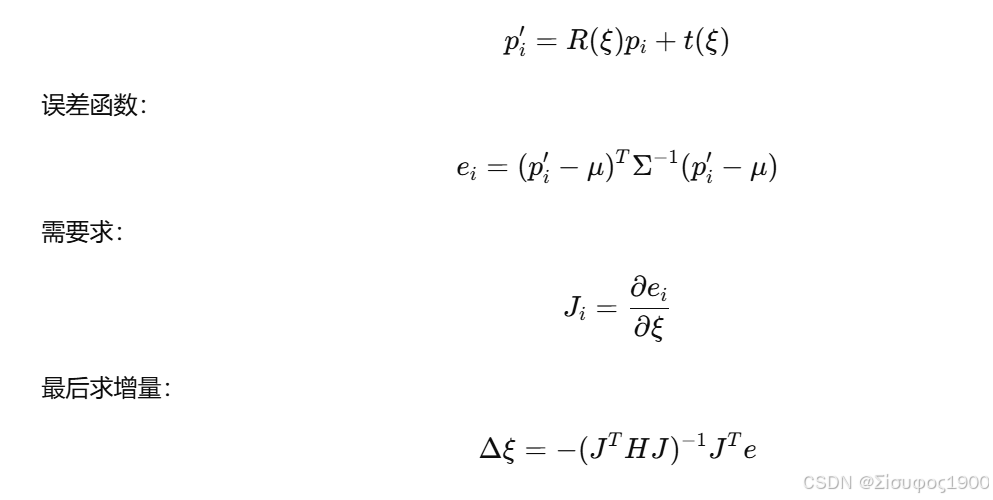
2.4 Step 4:对刚体变换线性化(LM / Gauss-Newton)
对微扰:
3、MATLAB 完整实现
MATLAB NDT 配准代码
cpp
function T = ndt_registration(P, Q, voxel_size, max_iter)
% P : target point cloud Nx3
% Q : source point cloud Nx3
% 1. Voxelization of target cloud
[voxels, mu, SigmaInv] = ndt_build_model(P, voxel_size);
T = eye(4); % initial pose
for iter = 1:max_iter
R = T(1:3,1:3);
t = T(1:3,4);
J = zeros(6,6);
b = zeros(6,1);
for i = 1:size(Q,1)
q = R*Q(i,:)' + t; % transformed source point
% find voxel ID
vid = ndt_find_voxel(q, voxel_size);
if ~isKey(voxels, vid), continue; end
mu_i = mu(vid,:);
S = SigmaInv{vid};
d = q - mu_i'; % residual
e = d' * S * d; % error
% Jacobian wrt ξ (Lie algebra)
% dq/dξ = [I, -R*[q]_x]
Jq = [eye(3), -R*skew(Q(i,:)')];
Ji = 2 * Jq' * S * d;
J = J + Ji * Ji';
b = b + Ji * e;
end
delta = -J \ b;
% update pose
T = expmap_se3(delta) * T;
if norm(delta) < 1e-5, break; end
end
end构建 NDT 体素模型
cpp
function [voxels, mu, SigmaInv] = ndt_build_model(P, voxel_size)
voxels = containers.Map();
mu = containers.Map();
SigmaInv = containers.Map();
% Assign points to voxels
ids = floor(P / voxel_size);
for i = 1:size(P,1)
key = sprintf('%d_%d_%d', ids(i,1), ids(i,2), ids(i,3));
if ~isKey(voxels, key)
voxels(key) = [];
end
voxels(key) = [voxels(key); P(i,:)];
end
% Compute Gaussian per voxel
keys = voxels.keys;
for i = 1:length(keys)
k = keys{i};
pts = voxels(k);
m = mean(pts,1);
C = cov(pts) + 1e-3 * eye(3);
mu(k) = m;
SigmaInv{k} = inv(C);
end
endSE(3) 李代数工具
cpp
function S = skew(v)
S = [ 0 -v(3) v(2)
v(3) 0 -v(1)
-v(2) v(1) 0 ];
end
function T = expmap_se3(xi)
w = xi(1:3);
v = xi(4:6);
theta = norm(w);
if theta < 1e-8
R = eye(3);
V = eye(3);
else
wn = w / theta;
wx = skew(wn);
R = eye(3) + sin(theta)*wx + (1-cos(theta))*(wx*wx);
V = eye(3) + (1-cos(theta))*wx + (theta-sin(theta))*(wx*wx);
end
T = eye(4);
T(1:3,1:3) = R;
T(1:3,4) = V * v;
end可视化示例
cpp
P = pcread("bun000.ply").Location;
Q = pcread("bun000.ply").Location; % rotated version
T = ndt_registration(P, Q, 0.05, 30);
Q_reg = (T(1:3,1:3)*Q' + T(1:3,4))';
pcshow(P,'b.'); hold on;
pcshow(Q_reg,'r.');
legend("Target","Registered");