1、Kabsch 算法
Kabsch 算法是一种用 SVD 求解两组对应点之间最优旋转矩阵 R 的方法,使它们的均方误差最小。
它是 ICP、结构生物学、机器人学中最常用的刚体对齐算法。
2、应用场景
✔ 1. ICP(Point-to-Point)核心步骤
求 R、t 用来把源点云对齐到目标点云。
✔ 2. 蛋白质结构比对(Kabsch 最早来自生物化学)
对齐两段蛋白质链。
✔ 3. 机器人位姿估计(Hand-Eye, PnP 简化版)
从 A→B 的对应点求最优旋转。
3、问题模型
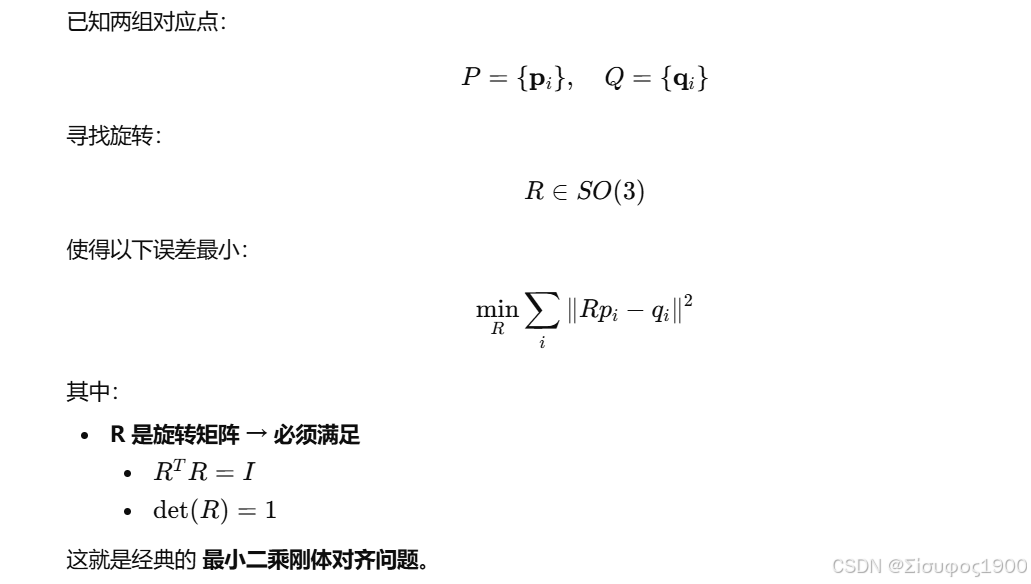
4、Kabsch 解决步骤(核心:SVD)
Step 1:去中心化(必须)

Step 2:构造协方差矩阵

Step 3:SVD 分解

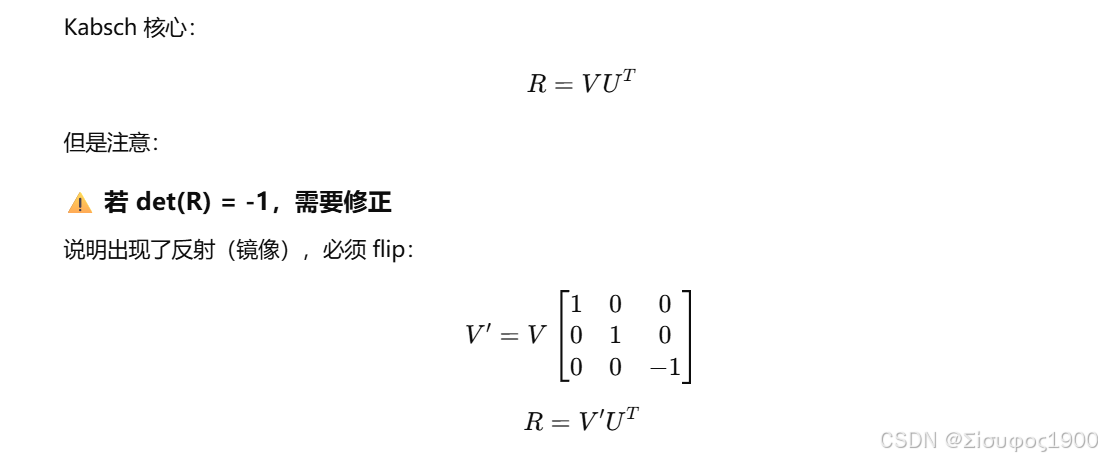
Step 4:旋转矩阵
Step 5:平移

这就是 ICP 中的 R、t 更新
5、几何解释
⭐ 1. 去中心化 → 去掉平移,只剩形状
让两个点云绕中心对齐。
⭐ 2. H = Σ pᵢ qᵢᵀ → 统计它们方向上的相关性
反映两个点云的"共同指向"。
⭐ 3. SVD → 找到最接近正交矩阵的线性映射
SVD 会把矩阵分解成旋转 × 缩放 × 旋转。
⭐ 4. V Uᵀ → 去掉缩放,只留下旋转
所以它得到的是最优旋转。
这就是 最小二乘意义下点云最优刚体旋转。
6、Kabsch 算法 MATLAB 完整实现
cpp
function [R, t] = kabsch(P, Q)
% 输入:P, Q (N×3), 按对应点排列
% 输出:R (3×3), t (3×1)
% 1. 去中心化
p_bar = mean(P, 1);
q_bar = mean(Q, 1);
P0 = P - p_bar;
Q0 = Q - q_bar;
% 2. 协方差矩阵
H = P0' * Q0;
% 3. SVD
[U, ~, V] = svd(H);
% 4. 旋转
R = V * U';
if det(R) < 0
disp('Reflection detected. Fixing...');
V(:,3) = -V(:,3);
R = V * U';
end
% 5. 平移
t = q_bar' - R * p_bar';
end
cpp
两组点云
P ● ● ● ● ●
Q ○ ○ ○ ○ ○
Step1 去中心化
Step2 构造 H
Step3 SVD → U, Σ, V
Step4 R = V Uᵀ
Step5 t = q̄ - R p̄
完成最优刚体对齐7、在 ICP 中的作用
ICP 的一轮迭代流程:
-
建立最近点对应
-
使用 Kabsch 求解 R, t
-
更新点云
-
收敛
👉 Kabsch 是 ICP 的核心数学工具。