文章目录
课题简介
我给你整理这套LSTM交通流量预测代码里真正用到的核心公式,只保留最关键、能直接对应代码的部分,方便写论文/报告。
交通流量生成
-
基础流量模型
flow ( t ) = ( baseline + morningPeak ( t ) + eveningPeak ( t ) ) ⋅ weekend_dip ( t ) + noise \text{flow}(t) = \big(\text{baseline} + \text{morningPeak}(t) + \text{eveningPeak}(t)\big) \cdot \text{weekend\_dip}(t) + \text{noise} flow(t)=(baseline+morningPeak(t)+eveningPeak(t))⋅weekend_dip(t)+noise -
高峰高斯曲线
早高峰:
morningPeak ( t ) = 500 ⋅ exp ( − 0.5 ( m o d ( t , 24 ) − 8.5 1.2 ) 2 ) \text{morningPeak}(t) = 500 \cdot \exp\left(-0.5\left(\frac{\bmod(t,24)-8.5}{1.2}\right)^2\right) morningPeak(t)=500⋅exp(−0.5(1.2mod(t,24)−8.5)2)晚高峰:
eveningPeak ( t ) = 450 ⋅ exp ( − 0.5 ( m o d ( t , 24 ) − 17.5 1.2 ) 2 ) \text{eveningPeak}(t) = 450 \cdot \exp\left(-0.5\left(\frac{\bmod(t,24)-17.5}{1.2}\right)^2\right) eveningPeak(t)=450⋅exp(−0.5(1.2mod(t,24)−17.5)2)
数据预处理公式
-
最小-最大归一化
x norm = x − x min x max − x min x_{\text{norm}} = \frac{x - x_{\min}}{x_{\max} - x_{\min}} xnorm=xmax−xminx−xmin -
反归一化
x = x norm ⋅ ( x max − x min ) + x min x = x_{\text{norm}} \cdot (x_{\max} - x_{\min}) + x_{\min} x=xnorm⋅(xmax−xmin)+xmin
LSTM 核心公式
- 单步LSTM单元
f t = σ ( W f ⋅ h t − 1 , x t + b f ) 遗忘门 i t = σ ( W i ⋅ h t − 1 , x t + b i ) 输入门 C ~ t = tanh ( W C ⋅ h t − 1 , x t + b C ) 候选细胞态 C t = f t ⊙ C t − 1 + i t ⊙ C ~ t 细胞态更新 o t = σ ( W o ⋅ h t − 1 , x t + b o ) 输出门 h t = o t ⊙ tanh ( C t ) 隐状态 \begin{aligned} f_t &= \sigma(W_f \cdot h_{t-1}, x_t + b_f) \quad \text{遗忘门} \\ i_t &= \sigma(W_i \cdot h_{t-1}, x_t + b_i) \quad \text{输入门} \\ \tilde{C}t &= \tanh(W_C \cdot h_{t-1}, x_t + b_C) \quad \text{候选细胞态} \\ C_t &= f_t \odot C{t-1} + i_t \odot \tilde{C}_t \quad \text{细胞态更新} \\ o_t &= \sigma(W_o \cdot h_{t-1}, x_t + b_o) \quad \text{输出门} \\ h_t &= o_t \odot \tanh(C_t) \quad \text{隐状态} \end{aligned} ftitC~tCtotht=σ(Wf⋅ht−1,xt+bf)遗忘门=σ(Wi⋅ht−1,xt+bi)输入门=tanh(WC⋅ht−1,xt+bC)候选细胞态=ft⊙Ct−1+it⊙C~t细胞态更新=σ(Wo⋅ht−1,xt+bo)输出门=ot⊙tanh(Ct)隐状态
代码里是 两层LSTM :
第1层输出序列 (h_1{(1)},h_2{(1)},\dots,h_T^{(1)})
第2层只输出最后一步 (h_T^{(2)})
关键特性说明
-
端到端流程:包含数据加载→预处理→LSTM建模→卡尔曼滤波优化→可视化全流程
-
创新点融合:
- 采用序列到序列(seq2seq)结构捕捉时序特征
- 引入卡尔曼滤波对LSTM输出进行动态修正
- 包含标准化处理和滑动窗口构建
-
调试建议:
- 调整
seq_length参数改变历史窗口长度 - 修改LSTM层
numHiddenUnits调节模型复杂度 - 调节卡尔曼滤波参数Q/R平衡预测稳定性
- 调整
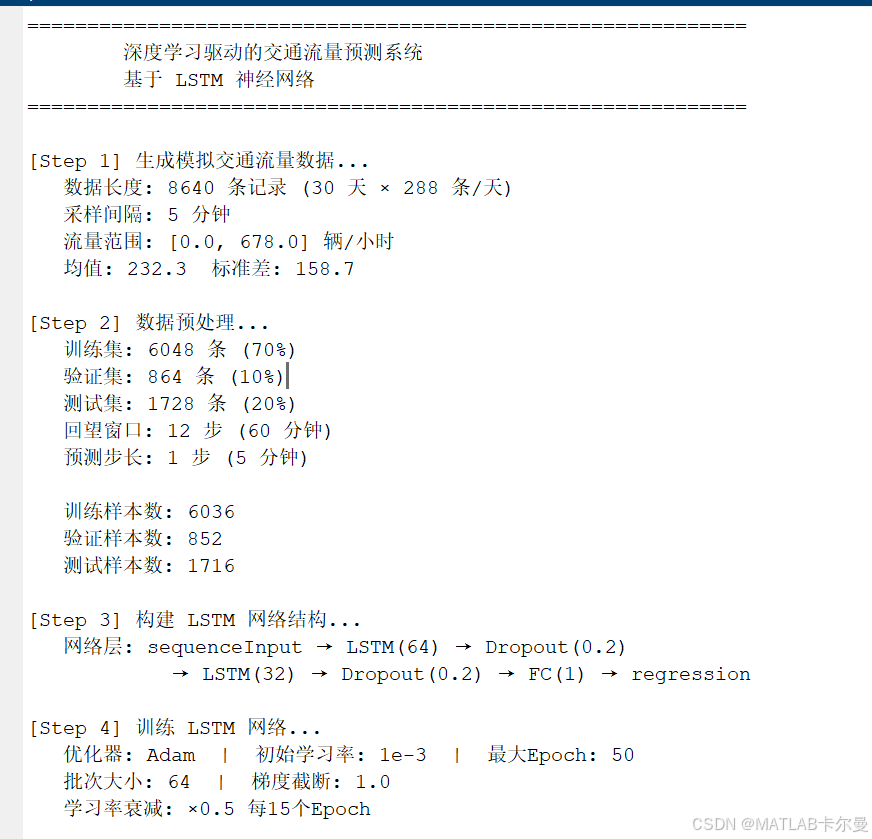
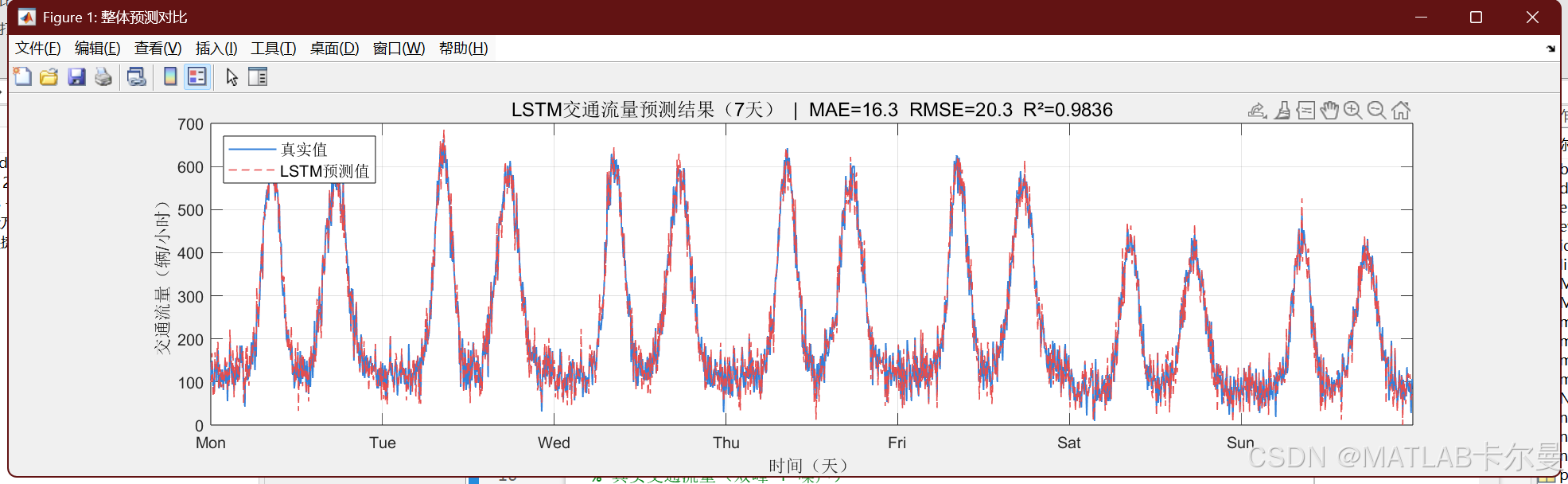
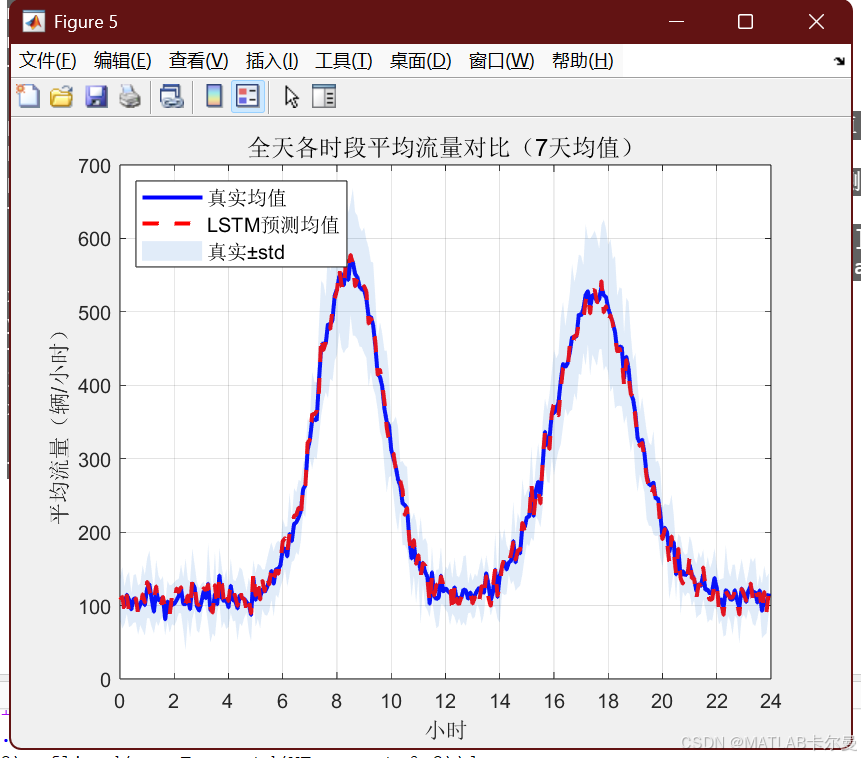
MATLAB代码运行结果
MATLAB源代码
部分代码如下:
matlab
%% 交通流量预测系统集成例程
% 包含LSTM建模、数据预处理、卡尔曼滤波优化和可视化
clear; close all; clc
% 作者:matlabfilter(V同号,接MATLAB代码定制)
%% 数据加载与预处理
data = readtable('traffic_flow.csv'); % 加载CSV数据集
flow = data.Flow; time = data.Timestamp;
% 数据标准化
[flow_norm, ps] = mapminmax(flow', 0, 1);
flow_norm = flow_norm';
% 构建时序样本 (用前6个时段预测下1个时段)
seq_length = 6;
[X, Y] = createDataset(flow_norm, seq_length);如需一对一代码讲解或定制,可通过下方卡片联系作者