系列内容:OpenCV概述与环境配置,OpenCV基础知识和绘制图形,图像的算数与位运算,图像视频的加载和显示,图像基本变换,滤波器,形态学,图像轮廓,图像直方图,车辆统计项目,特征检测和匹配,图像查找和拼接,虚拟计算器项目,信用卡识别项目,图像的分割与修复,人脸检测与车牌识别,目标追踪,答题卡识别判卷与文档ocr扫描识别,光流估计
(一)答题卡识别判卷
项目思路:
- 1.图片预处理
- 2.透视变换,把答题卡的视角拉正
- 3.找到每个圆圈的轮廓
- 4.通过计算非零值来判断是否答题正确
代码:
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
#封装显示图片的函数
def cv_show(name,img):
cv2.imshow(name, img)
cv2.waitKey(0)
cv2.destroyAllWindows()
img=cv2.imread('./paper.png')
cv_show('img',img)
#变成黑白图片
gray=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#去掉一些噪点
blurred=cv2.GaussianBlur(gray,(5,5),0)
cv_show('blurred',blurred)
#边缘检测
edged=cv2.Canny(blurred,75,200)
cv_show('edged',edged)
#检测轮廓
cnts=cv2.findContours(edged.copy(),cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)[1]
#画轮廓会修改被画轮廓的图
contours_img=img.copy()
cv2.drawContours(contours_img,cnts,-1,(0,0,255),3)
cv_show('contours_img',contours_img)
#确保拿到的轮廓是答题卡的轮廓
if len(cnts)>0:
#根据轮廓面积对轮廓进行排序
cnts=sorted(cnts,key=cv2.contourArea,reverse=True)
#遍历每一个轮廓
for c in cnts:
#计算周长
perimeter=cv2.arcLength(c,True)
#得到近似的轮廓
approx=cv2.approxPolyDP(c,0.02*perimeter,True)
#近似完了,应该只剩下四个角的坐标
# print(c)
# print(approx)
if len(approx)==4:
#保存approx
docCnt=approx
#找到答题卡近似轮廓,直接退出
break
docCnt
a=np.array([[[131, 205]],
[[119, 616]],
[[447, 613]],
[[430, 207]]])
#进行透视变换
#透视变换要找到变换矩阵
#变换矩阵要求原图的四个点的点坐标和变换之后的四个点坐标
#现在已经找到了原图的四个点的坐标,需要找到变换后四个点的坐标
#先对获取到的4个角点坐标按照一定的顺序排序(顺时针或逆时针)
#排序功能是一个独立功能,可以封装成一个函数
def order_points(pts):
#创建全是0的矩阵,来接收等下找出来的四个角的坐标
rect=np.zeros((4,2),dtype='float32')
s=pts.sum(axis=1)
#左上x+y最小,右下x+y最大
rect[0]=pts[np.argmin(s)]
rect[2]=pts[np.argmax(s)]
#右上角x-y最小,左下角x-y最大
diff=np.diff(pts,axis=1)
rect[1]=pts[np.argmin(diff)]
rect[3]=pts[np.argmax(diff)]
return rect
#把透视变换功能封装成一个函数
def four_point_transform(image,pts):
#对输入的四个坐标排序
rect=order_points(pts)
(tl,tr,br,bl)=rect
#空间中两点的距离
widthA=np.sqrt((br[0]-bl[0])**2+(br[1]-bl[1])**2)
widthB=np.sqrt((tr[0]-tl[0])**2+(tr[1]-tl[1])**2)
max_width=max(int(widthA),int(widthB))
heightA=np.sqrt((tr[0]-br[0])**2+(tr[1]-br[1])**2)
heightB=np.sqrt((tl[0]-bl[0])**2+(tl[1]-bl[1])**2)
max_height=max(int(heightA),int(heightB))
#构造变换之后的对应坐标位置
dst=np.array([
[0,0],
[max_width-1,0],
[max_width-1,max_height-1],
[0,max_height-1]
],dtype='float32')
#计算变换矩阵
M=cv2.getPerspectiveTransform(rect,dst)
#透视变换
warped=cv2.warpPerspective(image,M,(max_width,max_height))
return warped
#进行透视变换
warped=four_point_transform(gray,docCnt.reshape(4,2))
cv_show('warped',warped)
print(warped.shape)
#二值化
thresh=cv2.threshold(warped,0,255,cv2.THRESH_BINARY_INV|cv2.THRESH_OTSU)[1]
cv_show('thresh',thresh)
#找到每一个圆圈的轮廓
cnts=cv2.findContours(thresh,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)[1]
thresh_contours=thresh.copy()
cv2.drawContours(thresh_contours,cnts,-1,255,3)
cv_show('thresh_contours',thresh_contours)
plt.imshow(thresh_contours,cmap='gray')
#遍历所有的轮廓,找到特定的宽高和特定比例的轮廓,即圆圈的轮廓
question_cnts=[]
for c in cnts:
#找到轮廓的外接矩形
(x,y,w,h)=cv2.boundingRect(c)
#计算宽高比
ar=w/float(h)
#根据实际的情况指定标准
if w>20 and h>20 and 0.9<=ar<=1.1:
question_cnts.append(c)
len(question_cnts)
#轮廓排序封装函数
def sort_contours(cnts,method='left-to-right'):
reverse=False
#排序的时候,取x轴数据,i=0,取y轴数据i=1
i=0
if method=='right-to-left' or method=='bottom-to-top':
reverse=True
#按y轴坐标排序
if method=='top-to-bottom' or method=='bottom-to-top':
i=1
#计算每个轮廓的外接矩形
bounding_boxes=[cv2.boundingRect(c) for c in cnts]
(cnts,bounding_boxes)=zip(*sorted(zip(cnts,bounding_boxes),key=lambda b:b[1][i],reverse=reverse))
return cnts,bounding_boxes
#按照从上到下的顺序对question_cnts排序
question_cnts=sort_contours(question_cnts,method='top-to-bottom')[0]
#正确答案
ANSWER_KEY={0:1,1:4,2:0,3:3,4:1}
correct=0
for (q,i) in enumerate(np.arange(0,25,5)):
print(q,i)
#每次取出五个轮廓,再按x坐标从小到大排序
cnts=sort_contours(question_cnts[i:i+5])[0]
#遍历每一个结果
bubbled=None
for (j,c) in enumerate(cnts):
#使用掩膜,即mask
mask=np.zeros(thresh.shape,dtype='uint8')
cv2.drawContours(mask,[c],-1,255,-1)
# cv_show('mask',mask)
#计算非零个数
#先做与运算
mask=cv2.bitwise_and(thresh,thresh,mask=mask)
# cv_show('mask',mask)
#计算非零个数,选中的选项,非零个数多,没选中的选项,非零个数少
total=cv2.countNonZero(mask)
if bubbled is None or total>bubbled[0]:
bubbled=(total,j)
color=(0,0,255)
k=ANSWER_KEY[q]
#判断是否做题正确
if k==bubbled[1]:
correct+=1
color=(0,255,0)
#绘图
cv2.drawContours(warped,[cnts[k]],-1,color,3)
#计算分数
score=(correct/5.0)*100
print(f'score:{score:.2f}%')
cv2.putText(warped,str(score)+'%',(10,30),cv2.FONT_HERSHEY_SIMPLEX,0.9,(0,0,255),2)
cv_show('result',warped)运行结果:
答题卡原图,如图18.1所示:
 18.1-答题卡原图
18.1-答题卡原图
答题卡原图去噪点,如图18.2所示:
 18.2-答题卡原图去噪点
18.2-答题卡原图去噪点
答题卡边缘检测,如图18.3所示:
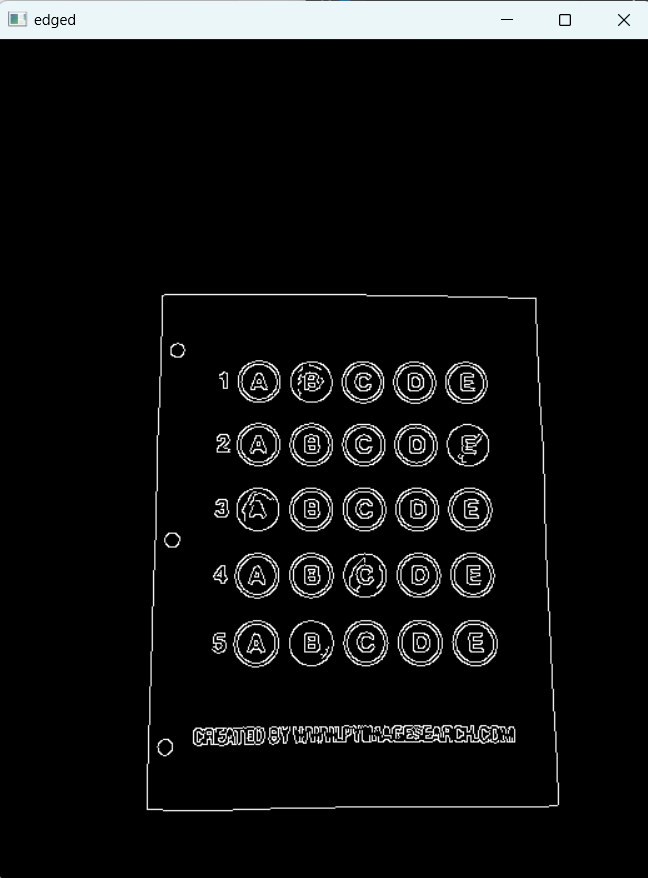 18.3-答题卡边缘检测
18.3-答题卡边缘检测
答题卡边缘绘制,如图18.4所示:
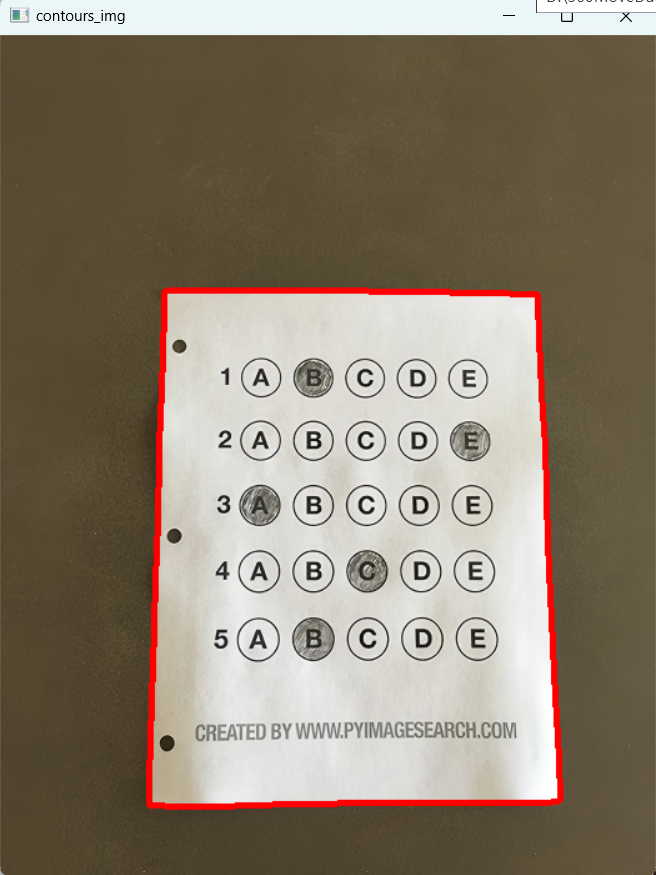 18.4-答题卡边缘绘制
18.4-答题卡边缘绘制
答题卡透视变换,如图18.5所示:
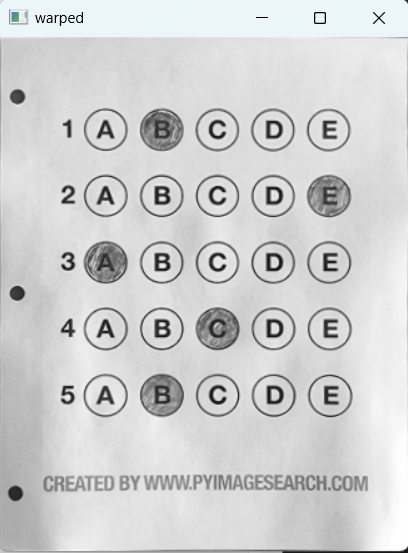 18.5-题卡透视变换
18.5-题卡透视变换
答题卡透视变换后二值化,如图18.6所示:
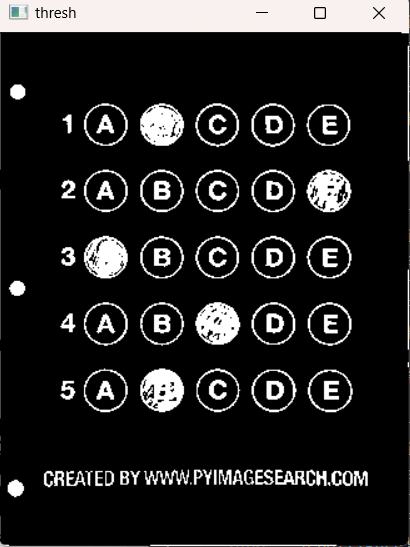 18.6-答题卡透视变换后二值化
18.6-答题卡透视变换后二值化
答题卡二值化后找到圆圈轮廓,如图18.7所示:
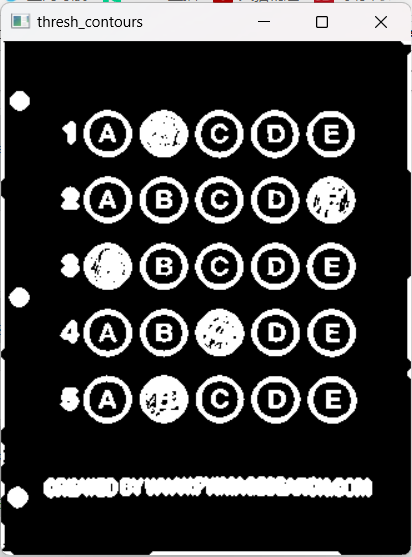 18.7-答题卡二值化后找到圆圈轮廓
18.7-答题卡二值化后找到圆圈轮廓
得到matplotlib图以确定圆圈的大小,如图18.8所示:
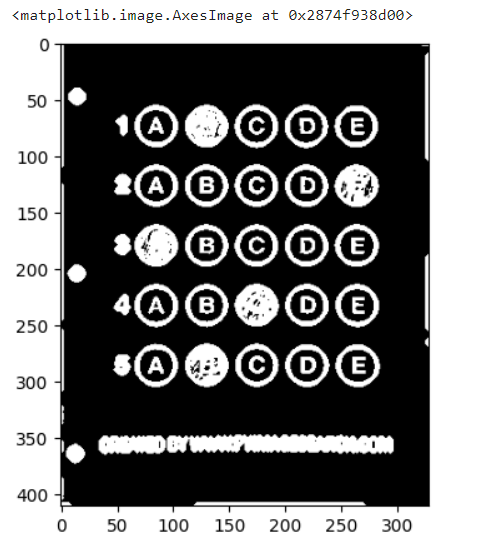 18.8-得到matplotlib图以确定圆圈的大小
18.8-得到matplotlib图以确定圆圈的大小
对答案得到最终结果分数,如图18.9所示:
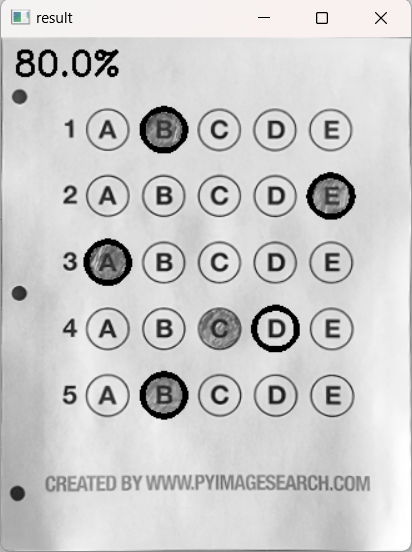 18。9-对答案得到最终结果分数
18。9-对答案得到最终结果分数
(二)文档ocr扫描识别
思路:
- 1.图片预处理
- 2.透视变换,视角拉正
- 3.tesseract进行识别
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
import pytesseract
from PIL import Image
#封装显示图片的函数
def cv_show(name,img):
cv2.imshow(name, img)
cv2.waitKey(0)
cv2.destroyAllWindows()
#读取图片
image=cv2.imread('./paper01.png')
#计算比例,限定高度500
image.shape
ratio=image.shape[0]/500.0
orig=image.copy()
#对图片进行统一的resize
#封装resize功能
def resize(image,width=None,height=None,inter=cv2.INTER_AREA):
dim=None
(h,w)=image.shape[:2]
if width is None and height is None:
return image
#指定了resiaze的height
if width is None:
r=height/float(h)
dim=(int(w*r),height)
#指定了resize的width
else:
r=width/float(w)
dim=(width,int(h*r))
resized=cv2.resize(image,dim,interpolation=inter)
return resized
#对图片进行resize
image=resize(orig,height=500)
image.shape
#图片预处理
#灰度化处理
gray=cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
#高斯平滑
gray=cv2.GaussianBlur(gray,(5,5),0)
#边缘检测
edged=cv2.Canny(gray,75,200)
cv_show('edged',edged)
#轮廓检测
cnts=cv2.findContours(edged.copy(),cv2.RETR_LIST,cv2.CHAIN_APPROX_SIMPLE)[1]
#按照面积排序
cnts=sorted(cnts,key=cv2.contourArea,reverse=True)
# cnts
image_contours=cv2.drawContours(image.copy(),cnts,-1,(0,0,255),2)
cv_show('image_contours',image_contours)
#遍历轮廓找到最大的轮廓
for c in cnts:
#计算轮廓周长
perimeter=cv2.arcLength(c,True)
#多边形逼近
approx=cv2.approxPolyDP(c,0.02*perimeter,True)
if len(approx)==4:
screen_cnt=approx
break
image_contours=cv2.drawContours(image.copy(),[screen_cnt],-1,(0,0,255),2)
cv_show('image_contours',image_contours)
#进行透视变换
#透视变换要找到变换矩阵
#变换矩阵要求原图的四个点的点坐标和变换之后的四个点坐标
#现在已经找到了原图的四个点的坐标,需要找到变换后四个点的坐标
#先对获取到的4个角点坐标按照一定的顺序排序(顺时针或逆时针)
#排序功能是一个独立功能,可以封装成一个函数
def order_points(pts):
#创建全是0的矩阵,来接收等下找出来的四个角的坐标
rect=np.zeros((4,2),dtype='float32')
s=pts.sum(axis=1)
#左上x+y最小,右下x+y最大
rect[0]=pts[np.argmin(s)]
rect[2]=pts[np.argmax(s)]
#右上角x-y最小,左下角x-y最大
diff=np.diff(pts,axis=1)
rect[1]=pts[np.argmin(diff)]
rect[3]=pts[np.argmax(diff)]
return rect
#把透视变换功能封装成一个函数
def four_point_transform(image,pts):
#对输入的四个坐标排序
rect=order_points(pts)
(tl,tr,br,bl)=rect
#空间中两点的距离
widthA=np.sqrt((br[0]-bl[0])**2+(br[1]-bl[1])**2)
widthB=np.sqrt((tr[0]-tl[0])**2+(tr[1]-tl[1])**2)
max_width=max(int(widthA),int(widthB))
heightA=np.sqrt((tr[0]-br[0])**2+(tr[1]-br[1])**2)
heightB=np.sqrt((tl[0]-bl[0])**2+(tl[1]-bl[1])**2)
max_height=max(int(heightA),int(heightB))
#构造变换之后的对应坐标位置
dst=np.array([
[0,0],
[max_width-1,0],
[max_width-1,max_height-1],
[0,max_height-1]
],dtype='float32')
#计算变换矩阵
M=cv2.getPerspectiveTransform(rect,dst)
#透视变换
warped=cv2.warpPerspective(image,M,(max_width,max_height))
return warped
warped=four_point_transform(orig,screen_cnt.reshape(4,2)*ratio)
warped.shape
cv_show('warped',warped)
#二值处理
warped=cv2.cvtColor(warped,cv2.COLOR_BGR2GRAY)
ref=cv2.threshold(warped,100,255,cv2.THRESH_BINARY)[1]
cv_show('ref',ref)
#把处理好的图片写入图片文件
cv2.imwrite('./scan.jpg',ref)
#pytesseract要求的image不是openCV读进来的image,而是pillow这个包,即PIL,按照pip install pillow
text=pytesseract.image_to_string(Image.open('./scan.jpg'))
print(text)运行结果:
小票原图,如图18.10所示:
 18.10-小票原图
18.10-小票原图
边缘检测结果,如图18.11所示:
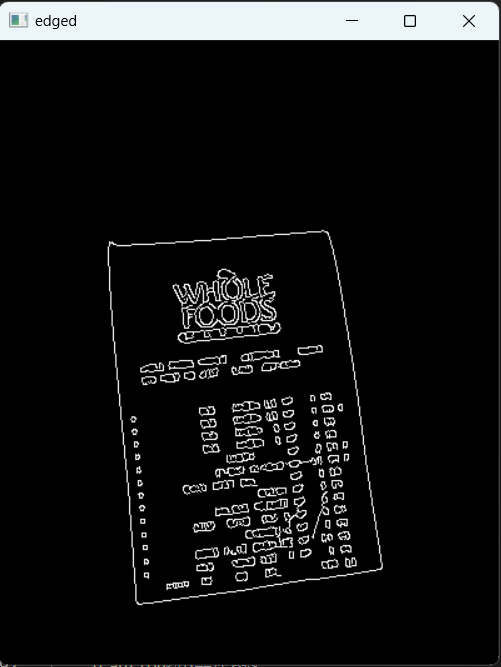 18.11-边缘检测结果
18.11-边缘检测结果
轮廓检测结果,如图18.12所示:
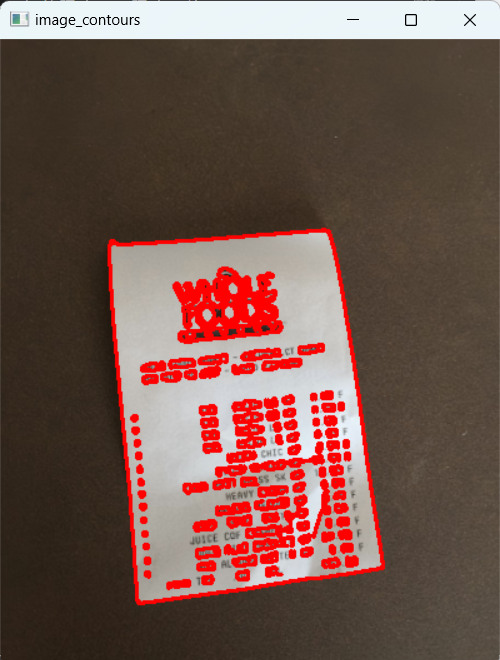 18.12-轮廓检测结果
18.12-轮廓检测结果
多边形逼近结果,如图18.13所示:
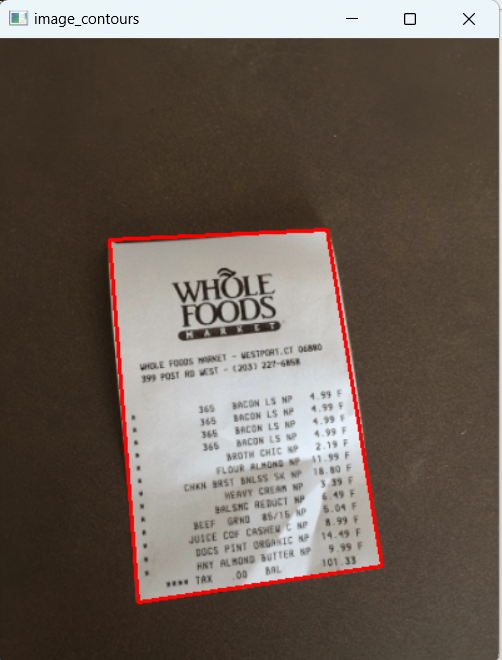 18.13-多边形逼近结果
18.13-多边形逼近结果
透视变换结果,如图18.14所示:
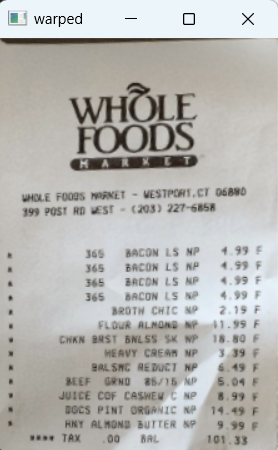 18.14-透视变换结果
18.14-透视变换结果
二值化处理结果,如图18.15所示:
 18.15-二值化处理结果
18.15-二值化处理结果
最终读出的文本(无高清图,只读出标题):
python
WHOLE
FOODS
Lt g