一、论文核心内容 📄
论文标题:pySLAM: An Open-Source, Modular, and Extensible Framework for SLAM(arXiv:2502.11955)
1. 核心定位
pySLAM 是一个开源的 Python/C++ 混合视觉 SLAM 框架,专为加速视觉 SLAM 和空间 AI 领域的研究与开发而设计。它解决了传统 C++ SLAM 框架门槛高、难以快速实验的痛点,同时通过 C++ 后端保证了性能。
2. 设计理念
- 模块化:核心组件(特征提取、回环检测、语义建图、体积重建等)可独立替换或扩展。
- 可扩展性:支持轻松集成新的算法和传感器。
- 易用性:Python 接口降低了开发和实验门槛,适合教学和快速原型开发。
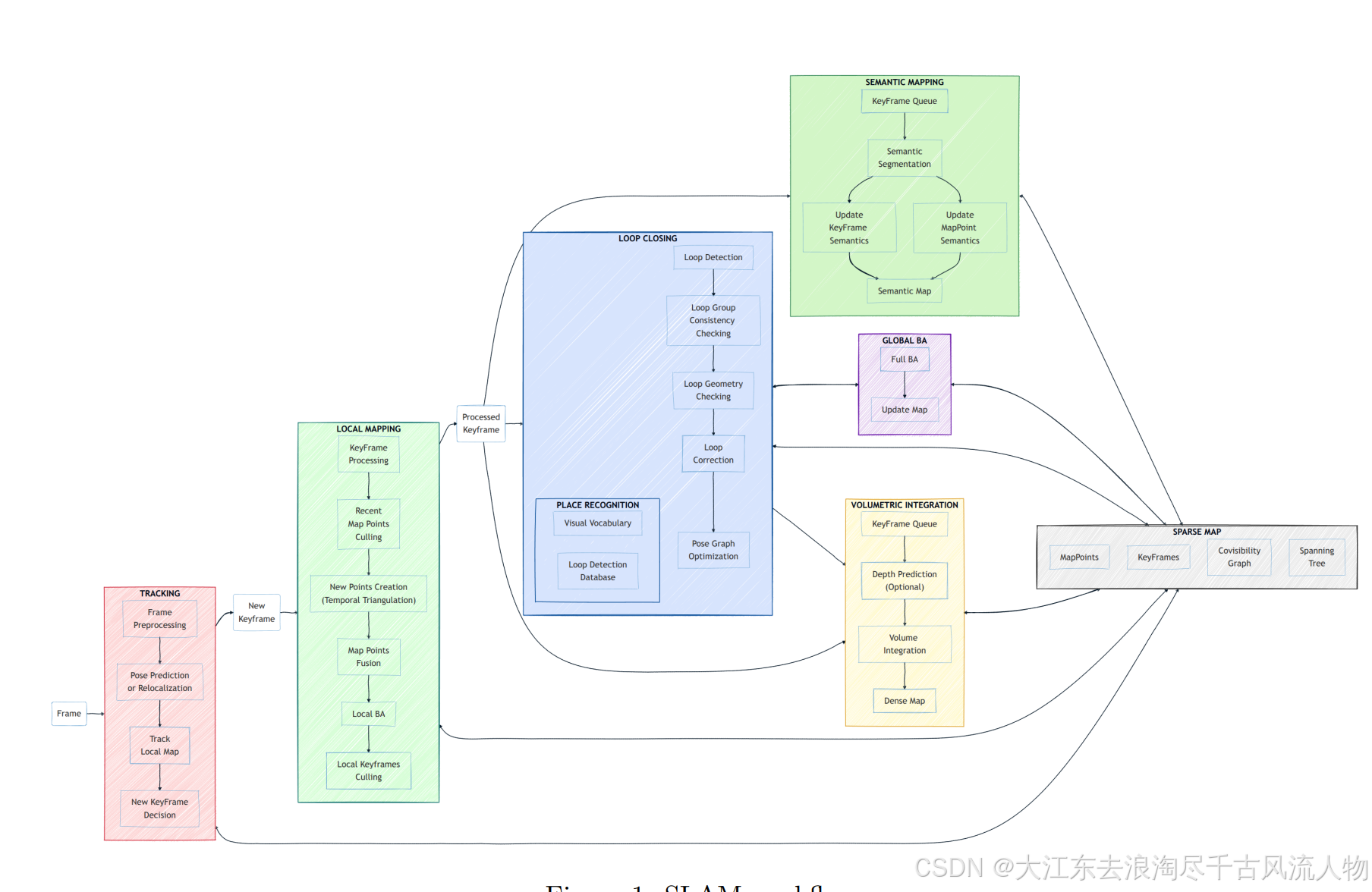
3. 核心模块与能力
| 模块 | 功能 | 支持算法/特性 |
|---|---|---|
| 跟踪 (Tracking) | 实时估计相机位姿,创建关键帧 | 支持单目、双目、RGB-D 相机 |
| 局部建图 (Local Mapping) | 处理关键帧,优化局部地图 | 剔除冗余点,生成新地图点 |
| 回环检测 (Loop Closure) | 检测已访问场景,修正累积误差 | DBoW2/3、多种局部描述符 |
| 全局优化 (Global Optimization) | 位姿图优化、全局 BA | g2o 等优化库 |
| 语义建图 (Semantic Mapping) | 为地图添加物体类别信息 | 集成语义分割模型 |
| 体积重建 (Volumetric Reconstruction) | 生成稠密三维地图 | 基于哈希的体素网格 |
| 深度预测 (Depth Prediction) | 从单目图像估计深度 | Depth Anything、RAFT-Stereo 等 |
4. 应用场景
- 视觉 SLAM 算法研究与验证
- 空间 AI 应用开发(如 AR/VR、自主导航)
- 教学与实验(SLAM/Spatial AI 课程)
二、GitHub 仓库资源 🛠️
项目地址:luigifreda/pyslam(当前版本 v2.10.0)
1. 核心目录结构
pyslam/:Python 主框架代码cpp/:性能关键的 C++ 实现(如体积重建模块)examples/:可直接运行的 SLAM 示例脚本docs/:详细的文档和教程(如语义建图、体积重建)thirdparty/:集成的第三方库(如 g2o、DBoW3)
2. 关键特性
- 多相机支持:单目、双目、RGB-D
- 丰富的特征库:SIFT、ORB、SuperPoint、LightGlue 等
- 深度学习集成:支持最新的深度估计和特征提取模型
- 可视化工具:实时位姿和地图可视化
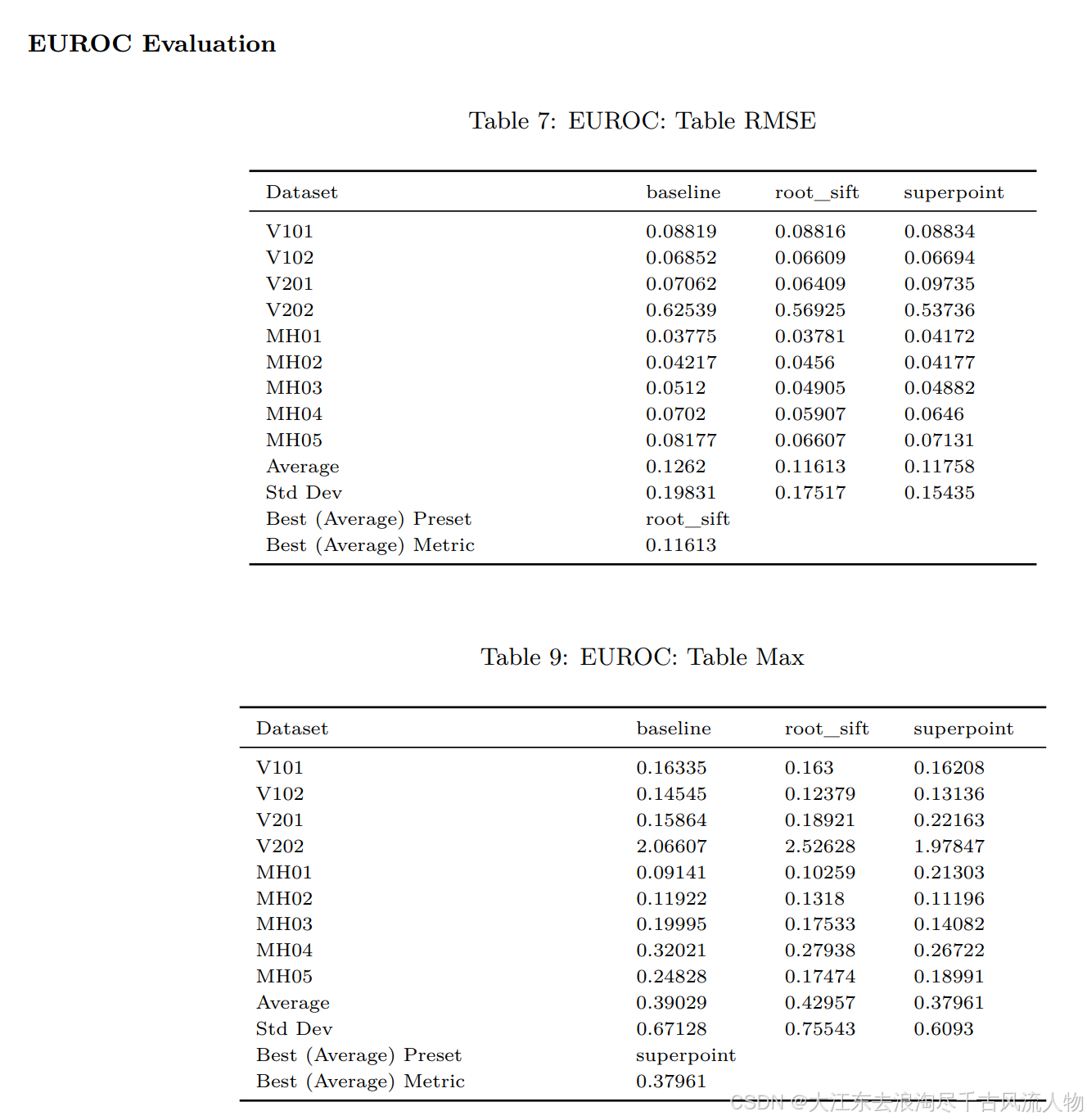
- 评估工具:与 TUM、KITTI 等数据集的评估脚本
3. 快速开始
bash
# 克隆仓库
git clone https://github.com/luigifreda/pyslam.git
cd pyslam
# 安装依赖
./install_dependencies.sh
# 运行单目 SLAM 示例
python main_slam.py --camera_model pinhole --config configs/mono_tum.yaml --dataset_path /path/to/tum_dataset三、总结与展望 ✨
pySLAM 凭借其 Python 的易用性和 C++ 的高性能,成为视觉 SLAM 领域一个极具价值的工具。它不仅降低了研究门槛,也为工程落地提供了灵活的框架。未来,随着更多深度学习模型和传感器的集成,pySLAM 将在空间 AI 领域发挥更大的作用。
如果你需要,我可以帮你整理一份 pySLAM 核心模块的详细技术文档 ,或者生成一个 Windows 环境下的安装和运行指南,方便你直接上手。需要我帮你做吗?