Unity万人同屏插件
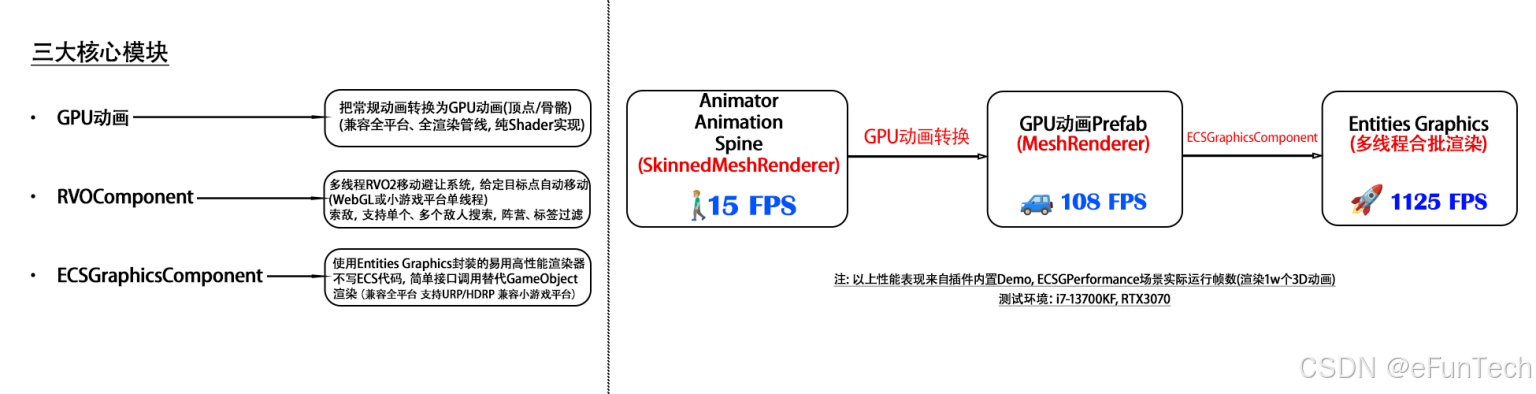 插件核心功能图
插件核心功能图
万人同屏插件是一款通用的Unity性能优化插件,是实现千人同屏、万人同屏的必备插件,直击性能消耗痛点功能,将2D Spine和3D动画性能十倍至百倍提升,Jobs多线程移动避让和索敌算法,以及兼容全平台的高性能渲染器。
万人同屏插件兼容Unity全平台,包括WebGL(2.0),微信/抖音小游戏等平台同样大幅性能翻倍
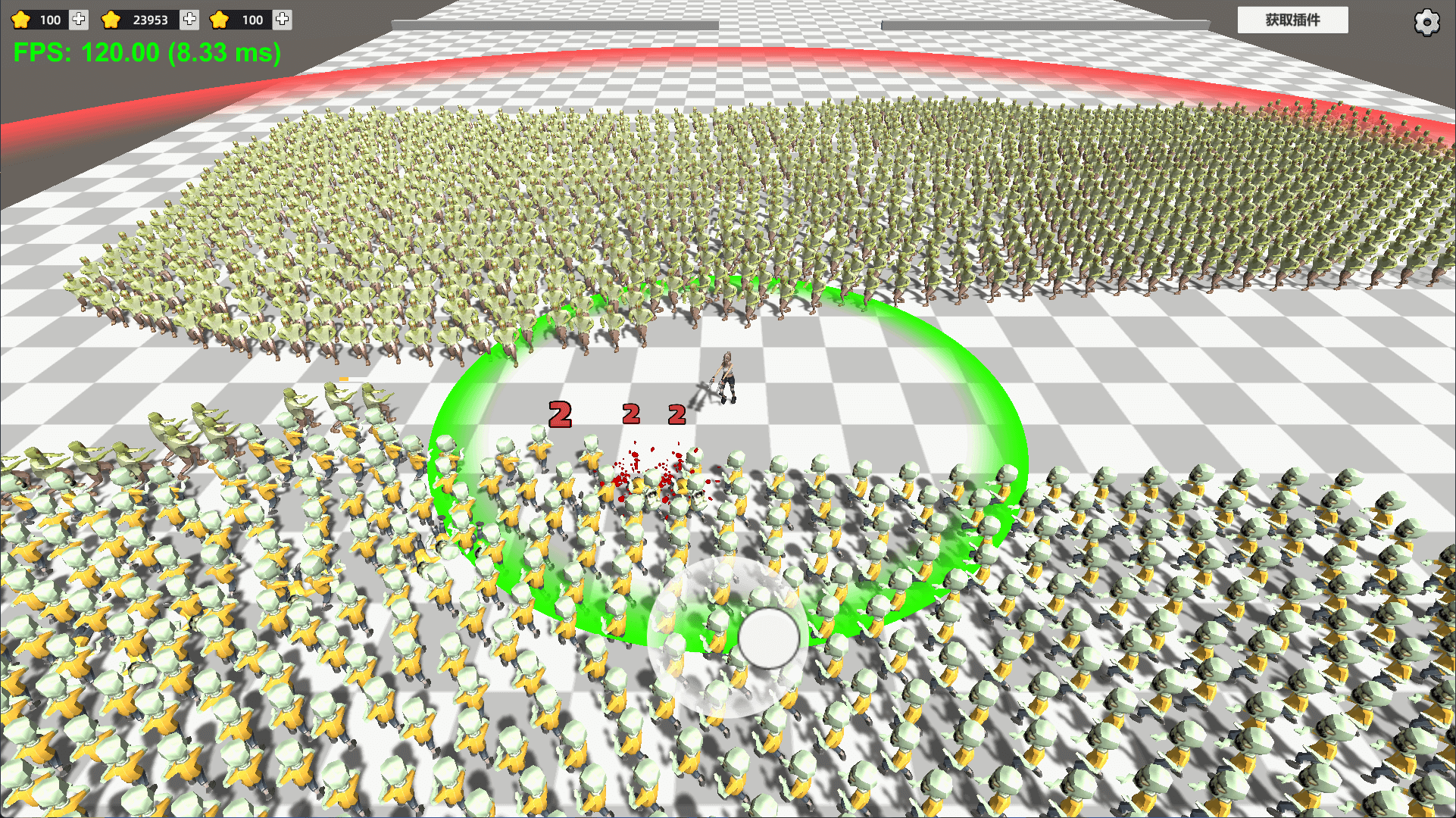
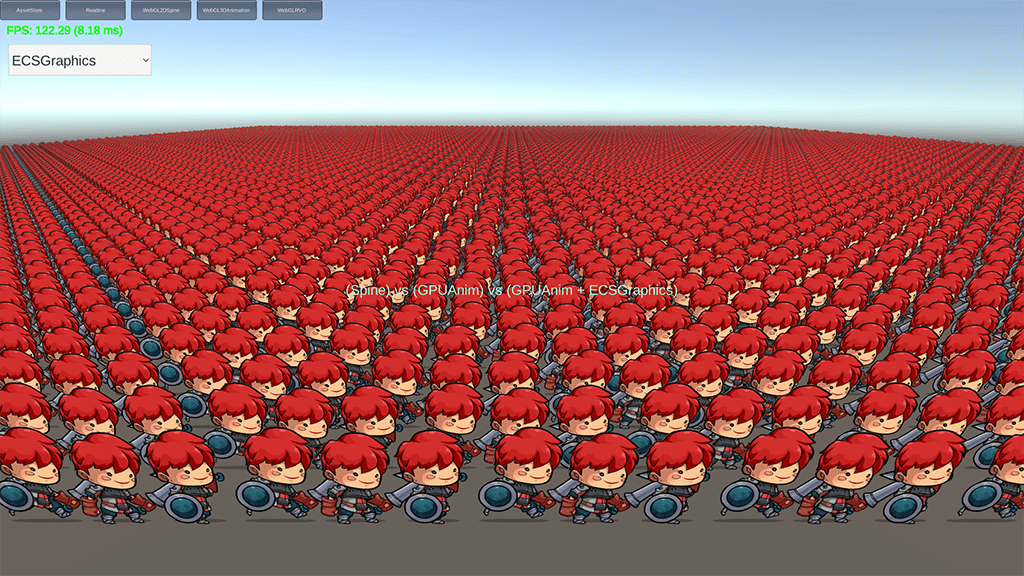
Unity万人同屏插件功能性能演示
Unity万人同屏集成方案Pro 支持微信小游戏![]() https://efunstudio.cn/
https://efunstudio.cn/
性能/功能/红蓝对抗测试Demo Web在线体验![]() https://assets.efunstudio.cn/
https://assets.efunstudio.cn/
十万单位红蓝对抗 多兵种战斗 弹幕游戏项目模板
网页版在线测试性能:
正文
https://www.bilibili.com/video/BV1ZeqwBtESs/
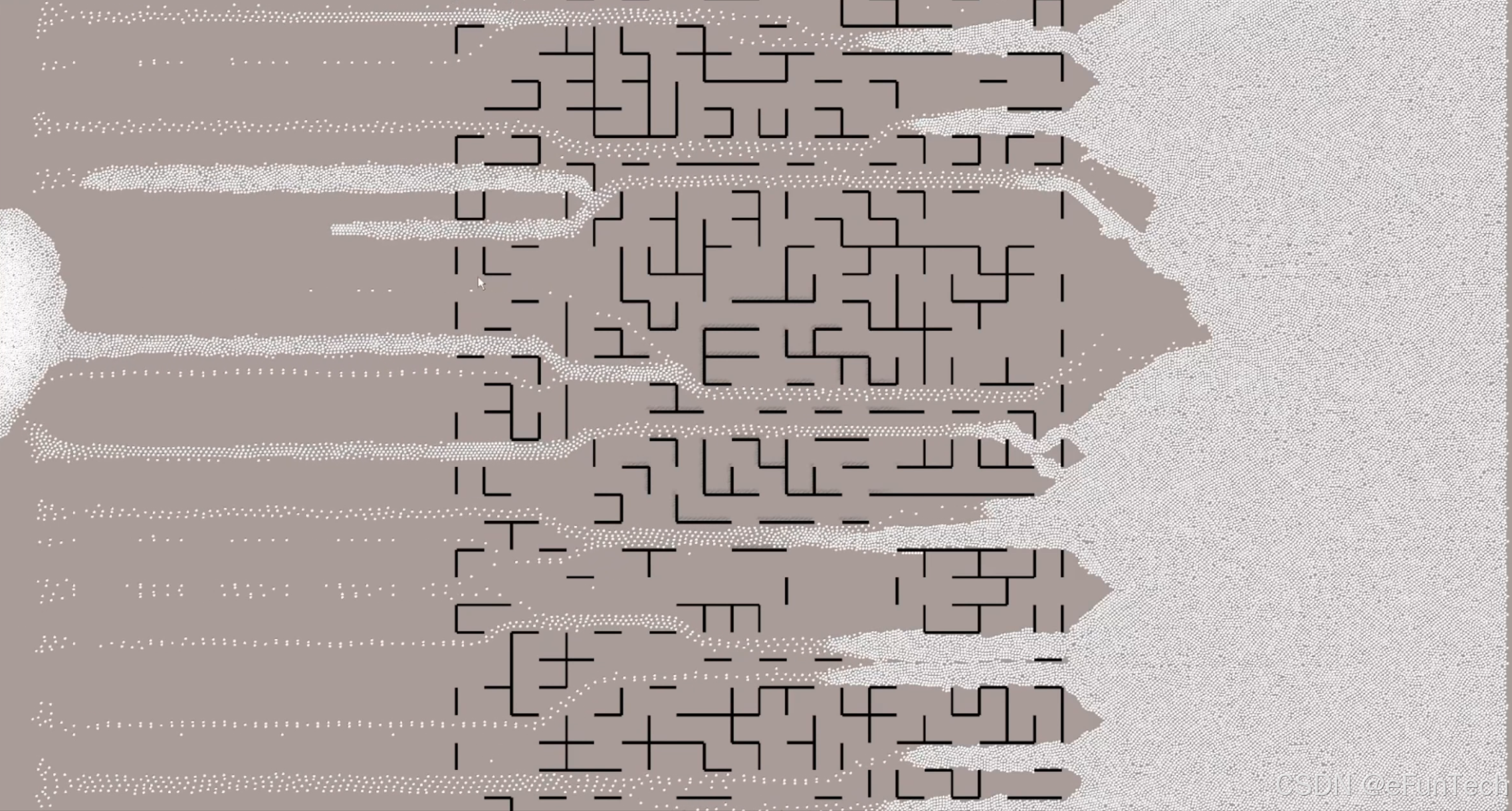
本文聚焦一个明确目标:在Unity中实现"10万人同屏动态避障 + 导航寻路 + 3D地形支持"。核心思路是以多线程Jobs的RVO(局部动态避障)为基础,再引入Jobs并行的跳点寻路(JPS)做批量路径查询,最后扩展RVOAgent使其能沿路径点移动,同时通过高度图把地形高度同步给RVO单位,实现真实3D地形上的行走。
系统流程图
为了更直观地理解数据如何在Jobs中流动,先看一张"文字流程图"。
[宏开关] -> [RVOComponent Awake/Start]
|
+--> [Terrain/Heightmap 采样缓存]
|
+--> [障碍物同步到 RVO + Pathfinding]
|
+--> [收集 AgentData 批量数组]
|
+--> [JPS Jobs 批量寻路]
| |
| +--> [写入共享路径缓冲]
|
+--> [RVO/ORCA Jobs 动态避障]
|
+--> [ORCAApply 回写位置/速度/路径索引]
|
+--> [地形高度同步 + 坡度速度修正]
|
+--> [Transform 同步显示]一、总体架构与设计目标
系统分为三层,彼此解耦但在运行时紧密协作:
- 局部避障层(RVO + Jobs):负责高密度单位的动态避让与速度输出,保证"能动、不卡"。
- 全局导航层(JPS + Jobs):负责为每个单位并行计算路径,解决"到哪去、怎么走"的全局可达性问题。
- 地形适配层(Heightmap + Jobs):根据高度图采样,把RVO输出的平面移动映射到真实3D地形高度,并根据地形坡度自动修正移动速度。
这三层组合后,就能达到"10万单位并发移动仍流畅"的目标:JPS并行批量查路,RVO负责局部动态避障,地形层确保落地到3D世界。
二、基于Jobs的RVO动态避障
RVO本质是局部避让,不负责全局路径。它适合处理大量单位在复杂场景中"彼此避让"的问题。通过Jobs并行计算,每帧对海量单位的速度进行更新,使10万级别的动态避障成为可能。
关键点在于:RVO只需要一个"当前目标点",它不关心这个目标点是否被大障碍阻断。因此我们必须将"路径点"喂给RVO单位,才能解决"卡在大障碍物前"的问题。
三、Jobs跳点寻路(JPS)的批量路径查询
为了支持10万人同屏,寻路必须"批量 + 并行"。JPS(Jump Point Search)本身在网格上具备很高效率,而通过Jobs并行化后,就能在同一帧内处理海量查询。
实现上通常采用以下策略:
- 把障碍物栅格化到统一网格中,形成可复用的阻塞缓存。
- 对大量单位的查询请求进行批量打包,一次性提交到Jobs。
- 使用分块(chunk)策略,让每个Job处理一部分单位,从而平衡CPU负载。
这样,JPS可以输出每个单位对应的路径点序列,为后续RVO移动提供全局路径支撑。
四、扩展RVOAgent:让避障单位支持路径移动
要让RVO单位真正"会导航",必须扩展Agent,使其能够根据路径点移动,而不是只对单一目标点进行避让。核心思想是:
- JPS计算结果是"路径点序列"。
- RVOAgent需要在每帧更新时,从路径点序列中选取合适的"当前目标点"。
- 当单位接近当前路径点时,自动切换到下一个路径点。
这样,RVO仍然处理局部动态避障,但导航方向由路径点控制,从而实现"全局可达 + 局部避让"的融合。
五、3D地形支持:高度图同步 + 坡度速度修正
RVO本质运行在平面(X/Z 或 X/Y),而地形是3D曲面。为了让单位贴地移动,需要借助高度图。
地形支持的关键步骤:
- 读取Terrain或Texture2D高度图,构建高度采样缓存。
- 在Jobs中对每个单位的当前位置进行高度采样,获取对应Y值。
- 将RVO输出的平面位置映射到真实地形高度,从而实现"贴地移动"。
进一步优化是坡度速度修正:坡度越大,单位移动速度越低。这让单位在上坡、下坡时更符合真实运动感。
六、接口用法(简洁示意)
只展示接口思路,不展开复杂实现:
// 1) 打开功能宏
RVO_PATHFINDING; RVO_TERRAIN; // 可选 AXIS_2D_MODE
// 2) 批量路径查询(JPS + Jobs)
var pathPoints = rvo.FindPathBatch(queryAgents, queryAgents.Length, out results, 64);
// 3) 把路径点喂给RVOAgent
agent.SetMovePath(pathPoints, baseIndex, pointCount);
// 4) 地形高度同步
rvo.SetTerrain(terrain); // 或 rvo.SetTerrain(heightmapTexture);七、性能要点与实践建议
- 不要每帧全量寻路:路径结果可缓存,目标变化时再更新。
- 合理设置网格尺寸与cellSize:越细越精确,但成本更高。
- 路径点数量要有上限,避免缓冲浪费与写入开销。
- 障碍物同步只做一次建模,避免RVO与Pathfinding维护两套障碍。
- 地形高度图分辨率要平衡精度与采样成本。
八、实现原理细节(从数据到算法)
要真正支撑10万人同屏,关键是把"逻辑"变成"数据流"。RVO、JPS与地形同步都是在Jobs中运行,主线程只负责准备数据与发起调度。这样的设计让计算几乎全部在Burst优化的Jobs里完成,减少主线程阻塞。
1)RVO的三段式数据流
RVO的核心流程可以拆成三段:数据准备、速度求解、结果回写。准备阶段把Agent对象打包成可并行处理的结构体数组;求解阶段在ORCA相关Jobs中计算无碰撞速度;回写阶段把结果应用到Agent并更新Transform(可选)。
这套模式的关键是"结构体数组 + NativeArray",避免了面向对象遍历时的性能损耗,也让Burst能够对数据做向量化优化。
2)AgentData / AgentDataResult 的职责划分
AgentData承载输入状态(位置、速度、目标点、半径、速度上限、避让参数等),AgentDataResult承载输出结果(新位置、新速度、是否到达、路径索引等)。这种输入输出分离让Jobs更容易并行,不会在不同线程间出现写冲突。
3)接口引用:RVO调度与路径刷新
在RVO调度前会统一刷新路径写入队列,确保ORCA在读取路径时不会读到"半写状态"。这一点通常在调度入口完成:
public JobHandle Schedule(float deltaTime, JobHandle dependOn = default)
{
FlushPendingMovePathWrites();
return m_Rvo.Schedule(deltaTime, dependOn);
}这种"调度前刷新"的策略既保证了线程安全,也保证了路径数据的可见性。
4)路径缓冲的参数化设计
路径缓冲的容量和步长往往决定了系统的内存占用和路径精度。典型的可配置参数包括:
[SerializeField, Min(1)] private int movePathSlotStride = 64;
[SerializeField, Min(1)] private int movePathInitialSlots = 4096;含义很直观:每个单位最多使用64个路径点,初始化路径槽数量为4096。10万单位时,路径槽会按需增长。这样既避免了"全部预分配"的极端浪费,也能保证高峰期仍然有可用槽位。
5)JPS的核心思想:跳点 + 缓存
JPS是对A*的优化,核心思想是"跳过冗余节点"。在网格上寻路时,大量相邻节点对最终路径没有贡献,JPS通过规则判断"跳点"来减少扩展节点数量。配合缓存的jump table与障碍栅格化,能显著降低路径查询成本。
从工程视角看,JPS还有两个优势:其一,网格结构天然适合并行处理;其二,路径点易于压缩与简化,适合批量存储。
6)批量寻路与分块并行
对10万单位而言,"逐个寻路"是不可接受的。批量化的做法是将查询分为若干chunk,每个chunk在独立的scratch空间里做搜索,这样避免了线程之间共享临时数据。
另一方面,批量查询还可以配合"多帧更新策略":只更新需要重新寻路的单位,其余单位沿旧路径继续行走,整体运动仍然连续且稳定。
7)路径点简化与直线可视性
JPS输出的路径点数量可能较多,如果直接喂给RVO,会造成"路径太密,目标切换过于频繁"。因此通常会进行路径简化,比如去掉连续同向的冗余节点,或者在有直线可视的情况下直接连接首尾节点。
这样做不仅让单位转向更自然,也降低了路径缓冲的占用。
8)路径跟随中的Lookahead与回归路径
RVOAgent跟随路径时,不能仅仅追逐"下一路径点"。更稳妥的做法是:根据当前位置投影到路径段,计算一个"lookahead"目标点,既避免频繁转向,也能让单位在局部避障后顺畅回归路径。
当单位偏离路径过远时,逻辑会优先把目标指向投影点,先"回到路径",再继续前进。这种策略能显著降低"偏航漂移"的问题。
九、数据流与并行架构(Jobs管线视角)
为了支撑10万规模,关键不是"单个算法有多快",而是"数据如何在多线程里流动"。整体上可以理解为一条流水线:
- 主线程收集/刷新Agent状态(位置、目标点、速度等),打包为可并行的NativeArray。
- ORCA相关Jobs并行计算局部避障后的速度与下一步位置。
- Pathfinding相关Jobs并行查询路径点序列,形成"全局导航参考"。
- 应用阶段统一回写结果(位置、朝向、路径索引),并在必要时同步Transform。
这条管线中最重要的原则是"批量化":所有昂贵的事情都在批量中做,而不是逐个Agent做。这样才能让Jobs真正发挥并行优势,避免线程切换与调度开销反噬性能。
十、共享路径缓冲:让10万条路径可用且可控
如果给每个Agent都维护一份路径数组,10万单位会迅速把内存和复制成本拖垮。因此需要"共享路径缓冲"的设计:
- 路径点存放在一块连续的NativeArray中,通过"slot + stride"定位。
- 每个Agent只记录slot、路径长度与当前索引,路径点本身集中存储。
- 路径写入采用批量写入队列,在调度前统一Flush,减少随机写。
这样一来,无论是JPS输出的路径点,还是RVOAgent的路径跟随,都不会产生过多临时分配。路径长度受上限限制,可以通过参数控制内存占用与精度之间的平衡。
十一、障碍物同步机制:一次建模,双系统可用
动态避障与寻路都依赖障碍物。如果两套系统维护两份障碍数据,成本很高且容易出错。更合理的做法是"统一障碍输入",在RVO与JPS之间做同步:
- 场景障碍物组件在启用时同时注册到RVO与Pathfinding。
- 当宏开启后,障碍的顶点会被同步到寻路系统中参与栅格化。
- 边界障碍可用Edge模式,封闭多边形可用Polygon模式。
这样可以保证"避障看到的障碍"和"寻路看到的障碍"是一致的,避免路径规划通过但RVO无法穿越的情况。
十二、3D地形支持的关键细节
在地形场景中,RVO通常只计算平面运动(X/Z)。为了把平面移动映射到真实地形,需要高度图采样与速度缩放:
- 高度图采样使用双线性插值,保证高度变化平滑。
- 将平面位置映射到采样高度,写回Agent的Y值。
- 根据坡度变化计算速度缩放因子,上坡变慢、下坡更快。
地形支持必须放在Jobs里批量执行,否则单线程采样会成为瓶颈。通过"高度图缓存 + 并行采样",地形适配成本可以被摊薄到每个Agent。
十三、路径写回与Agent扩展细节
让RVO单位"沿路径走"有三个关键点:路径数据如何写入、路径索引如何维护、路径目标如何动态更新。
在接口层面,RVOAgent提供了SetMovePath用于接收路径点序列。典型调用方式如下:
agent.SetMovePath(pathPoints, beginIndex, pointsCount);SetMovePath内部会把路径写入共享缓冲,并初始化路径索引。路径点数量为1时会走快速通道,直接把终点设为目标;如果路径过长,系统会根据stride做裁剪,防止写入溢出。
路径跟随逻辑中,当前路径索引会在Jobs里更新,并在回写阶段同步到Agent。这样即使单位在避障过程中偏离路径,也能在下一帧重新找到合适的路径段。
十四、JPS批量寻路的调用与结果处理
JPS提供两种常用接口:一种返回路径点数组并同时给出结果索引;另一种允许你自带缓冲区,减少临时分配。常见用法如下:
var pathPoints = rvo.FindPathBatch(queryAgents, queryAgents.Length, out results, 64);
// 或
rvo.FindPathBatchInto(queryAgents, queryAgents.Length, outPathPoints, outResults, 64);每个Agent对应的路径点在数组中按"固定步长"排列,步长就是perAgentMaxPathPoints。结果结构体里通常包含PathPointCount与Success字段,用来判断路径是否有效。
当路径点数量小于2时,RVO会把目标点作为直达目标;当路径点较多时,RVO会按路径进行跟随,直到到达终点。
十五、3D地形采样的实现要点
地形采样核心是"世界坐标 → 高度图UV → 双线性插值"。在Jobs中实现时,会先把世界坐标转换到高度图坐标系,再通过四个相邻采样点插值出平滑高度。典型逻辑可以概括为:
// worldXZ -> (u, v) -> (x0,x1,z0,z1) -> bilinear
float sampledY = SampleHeight(worldXZ);
agent.worldPosition = new float3(x, sampledY, z);采样完成后,还会根据坡度计算速度缩放。坡度越大,速度越低,既保证了"贴地"效果,也避免单位在陡坡上出现不真实的高速移动。
十六、宏开关与构建策略
大规模系统最怕"功能全开带来的无谓开销"。通过宏开关,可以把不需要的功能在编译期裁剪掉:
- RVO_PATHFINDING:启用路径系统、共享路径缓冲与路径跟随逻辑。
- RVO_TERRAIN:启用地形高度同步与坡度速度修正。
- AXIS_2D_MODE:切换2D空间(X/Y)或3D地平面(X/Z)。
在需要极致性能的场景中,可以只开启RVO,关闭路径与地形;在需要完整导航能力时,再开启路径和地形宏。
十七、从工程角度看路径与避障的融合策略
很多项目会在"路径规划"和"避障"之间摇摆:路径太"理想化",避障太"局部化"。这个系统的关键价值在于把两者合并成"路径驱动的避障"。
具体策略可以总结为:
- 路径负责"要去哪里",避障负责"如何去"。
- 路径点不会直接控制速度,而是作为RVO的目标输入。
- 当避障产生偏移时,路径提供回归约束,避免漂移。
这种融合方式非常适合高密度单位,因为避障不需要关心全局,只需要在局部保持流畅。
十八、典型场景配置建议
以下是三个常见场景的参数思路,供参考:
- RTS大规模战斗:网格分辨率中等,cellSize 1~2;路径点上限64;每帧只更新部分路径。
- 塔防/固定路线:路径点可以提前生成并缓存,RVO只做局部避让。
- 迷宫/复杂障碍:适当降低cellSize提高精度,同时控制路径点上限与障碍安全膨胀。
十九、更多代码引用(接口层)
为了便于定位实现位置,这里列出几个关键接口的"签名级引用",帮助你快速找到实现:
public NativeArray FindPathBatch(..., out NativeArray pathResults, int perAgentMaxPathPoints = 64)
public void FindPathBatchInto(..., NativeArray outPathPoints, NativeArray outResults, int perAgentMaxPathPoints = 64)
public void SetTerrain(Terrain terr)
public void SetTerrain(Texture2D heightmap)
public void SetMovePath(NativeArray pathPoints, int beginIndex, int pointsCount)这些接口覆盖了"路径查询、路径写回、地形同步"的最核心能力,也是你在项目中最常调用的API。
二十、性能测试方法与验证流程
想要验证"10万人同屏",需要一套稳定的测试方法,否则容易被偶发因素干扰:
- 固定场景规模与障碍分布,保证测试条件一致。
- 分离"寻路性能"和"避障性能",分别测量不同阶段耗时。
- 记录每帧路径查询数量、RVO调度耗时、地形采样耗时。
- 关注峰值与平均值,避免只看平均帧率。
对于大规模单位来说,"稳定性"比"极限帧率"更重要,尤其是在多人同屏场景下,帧时间波动会直接影响体验。
二十一、性能评估与调参流程
想要稳定达到10万人同屏,需要用"预算"思维来规划性能:
- 每帧预算:RVO避障要保证实时性,路径查询可以分帧或按需执行。
- 网格尺寸与cellSize:越细路径越精确,但JPS成本更高。
- 路径点上限:限制单条路径点数,避免超长路径导致缓冲爆炸。
- 障碍安全膨胀:适当增大可以减少局部卡死,但过大可能导致路径绕行过度。
实践中建议把路径查询拆为"增量批次",让每帧只处理部分单位更新路径,其余单位沿旧路径继续移动,整体流畅性会更好。
二十二、常见问题与排查思路
- 单位卡在障碍边缘:检查路径点是否过稀或ObstacleSafetyInflation过小。
- 路径更新后单位跳动:确认路径点写入与RVO调度顺序,避免帧内冲突。
- 地形高度抖动:检查高度图分辨率与采样精度,必要时做平滑处理。
- 内存占用过高:缩小每个Agent的路径点上限或降低网格尺寸。
- 性能不稳定:避免每帧全量寻路,改为"目标变化时更新"。
二十三、可扩展方向
当基础系统稳定后,还可以进一步增强:
- 群体目标:对同一目标点可结合流场或局部编队逻辑。
- 分层寻路:远距离用粗网格,近距离用细网格,提高效率。
- 动态代价:根据地形类型或战斗区域动态改变格子权重。
- 多层移动:空中单位、地面单位使用不同通行规则。
二十四、总结:为何这套方案能扩展到10万单位
从工程角度来看,这套系统的可扩展性来自三个关键点:
- 所有重计算都在Jobs中批量处理,避免主线程成为瓶颈。
- 路径与避障解耦但可融合,路径提供全局约束,RVO提供局部流畅。
- 共享路径缓冲与高度图缓存让内存与数据拷贝成本可控。
当这些设计同时成立时,10万单位的同屏移动不再是"理论极限",而是可工程化落地的实际能力。
结语
通过"RVO动态避障 + JPS批量寻路 + 高度图地形同步"的组合,我们可以在Unity中实现10万人同屏的导航寻路系统。RVO保证局部流畅避让,JPS提供全局路径指引,地形采样让单位真正移动在3D世界表面。这是一套可以落地在RTS、塔防、战争模拟等大规模项目中的工程化方案。