6DOF模块分为很多种类型,本次主要先介绍基于欧拉角的六自由度模块-6DOF (Euler Angles) 。模块是整个无人机物理仿真模型的绝对核心 。如果你把前面的 Rotor 模块比作无人机的"肌肉"(产生力量),那么这个模块就是"物理定律引擎",将会决定机身如何响应这些力量。该模块专门用于求解刚体六自由度空间运动的 牛顿-欧拉方程。
1.模块输入
模块只有两个输入,力与力矩,两者均为为3维的向量
: 这是当前时刻,无人机在机体坐标系 (Body Frame) 下受到的总合力
。它包含了所有旋翼的推力分量、空气阻尼力,以及重力在机体轴上的投影。
:这是当前时刻,无人机在机体坐标系下受到的总力矩
。它包含了旋翼反扭矩、推力偏置力矩以及气动阻尼力矩。
2. 模块的核心物理引擎
在这个黑盒内部,Simulink 以极高的频率(比如你之前设置的 0.01 秒步长)疯狂求解以下两组非线性微分方程
2.1 平动动力学 (牛顿第二定律扩展版)
解算无人机的三轴线速度倒数
这里面巧妙地包含了 科氏加速度项,这是空间六自由度运动特有的
2.2 转动动力学 (欧拉方程)
解算角加速度
3. 模块输出
模块右侧吐出了一大排数据,这些数据将作为传感器的"真实值",反馈给你的控制算法
3.1 导航与轨迹观测系 (Earth Frame / 惯性系):
:在地球坐标系下的北-东-地 (NED) 速度。这是判断无人机往哪个地理方向飞的依据。
: 在地球坐标系下的绝对位置 \[x, y, z\]。其中 z 通常是负值,代表飞行高度(因为 Z 轴向下)。
3.2 姿态观测系
:欧拉角(滚转角、俯仰角、偏航角)
:方向余弦矩阵 (Direction Cosine Matrix),这是比欧拉角更底层的旋转矩阵,用于在机体坐标系和地球坐标系之间转换向量,能有效避免欧拉角在90度时的"万向节死锁"问题。
3.3 机载传感器反馈系
:机体三轴线速度
。正如我们之前所见,它被反馈给了 Rotor 模块去计算风速。
:机体三轴旋转角速度。它是你内环姿态控制(特征建模)最直接的被控变量,也是陀螺仪量测的真实值。
3.4 加速度反馈
:角加速度
:分别是机体坐标系和地球坐标系下的线加速度。这相当于机载加速度计 (IMU) 读取到的原始数据。
4. 参数设置
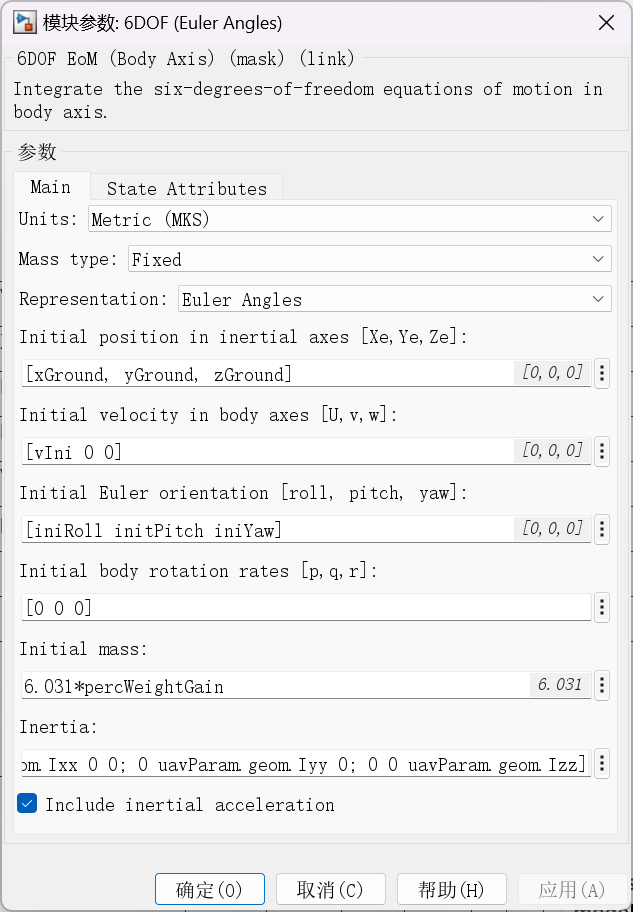
决定了它对推力和力矩的响应有多"迟钝"或多"灵敏"。
Initial Position (初始位置),
Initial Velocity (初始线速度),
Initial Euler Angles (初始欧拉角),
Initial Body Rotation Rates (初始机体角速度),
Initial mass (初始质量)
对角惯量矩阵设计 (Inertia)