摘要:
前面策略一直以表格形式呈现:所有状态的动作概率均存储于表中。
本章将展示策略可通过参数化函数表示,当策略以函数形式表示时,可通过优化特定标量指标来获得最优策略,这种方法称为策略梯度。 策略梯度方法具有诸多优势。例如,它能够更高效地处理大规模的状态/动作空间;具备更强的泛化能力,因而在样本利用率上也更为高效。
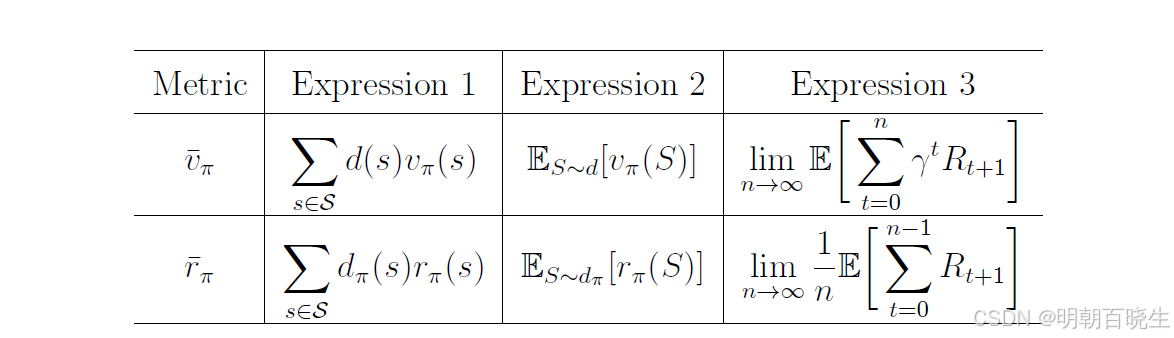
本章核心是掌握下面表格
目录
-
从表格到标量目标函数
-
评估指标 1:Average state value
-
评估指标 2: Average one-step reward
-
关于评估指标(metrics)的几点说明
-
Metric的另一种形式
一. 从表格到标量目标函数
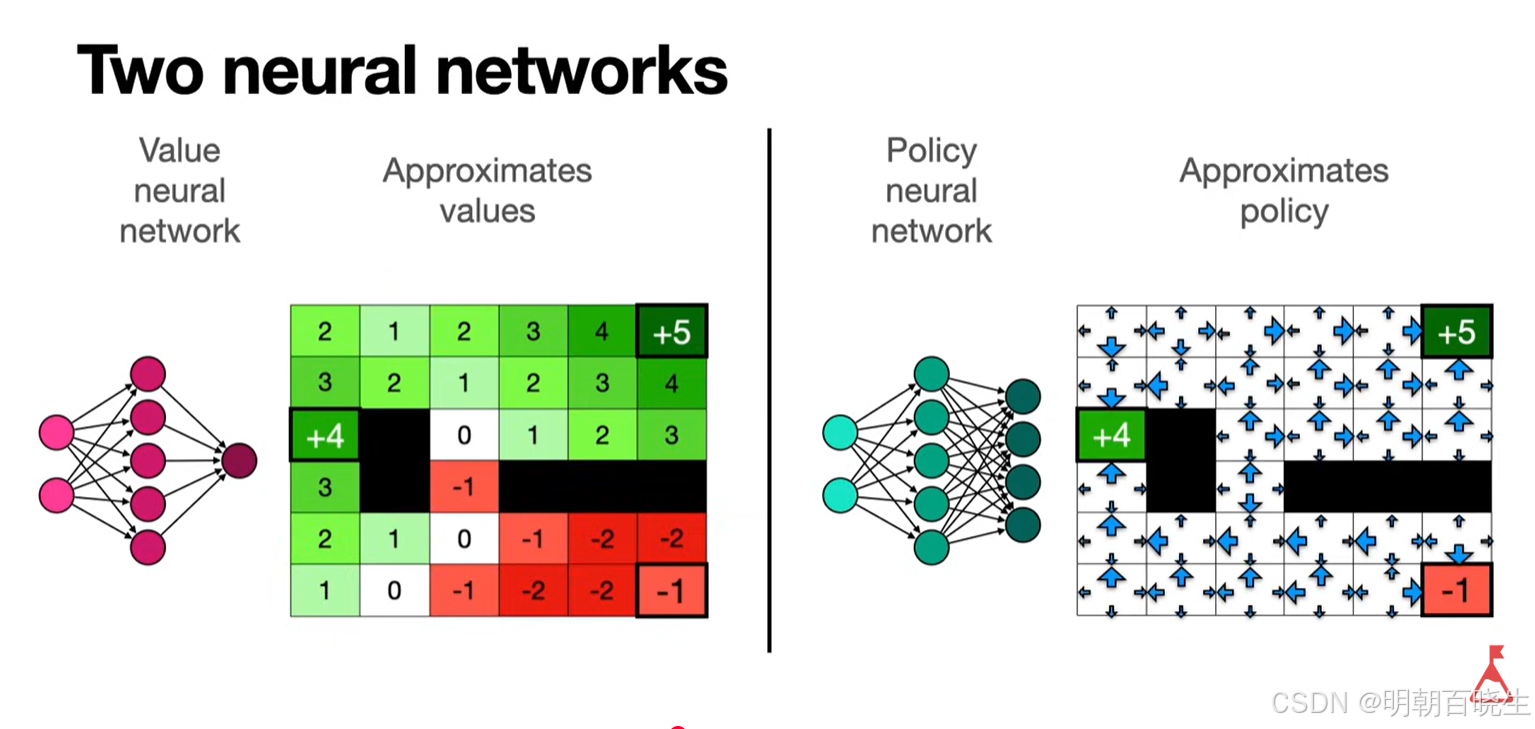
前面学习的 Sarsa 和 Q-learning 均属于表格型强化学习,其中策略直接存储在状态-动作对应的条目中。最优策略被定义为:在所有状态上,其状态价值函数均不劣于其他任何策略的价值函数,这本质上是多个标量间的联合比较。
在函数逼近方法中,策略由参数(如神经网络权重)参数化为 ,策略空间连续且庞大,无法逐一比较各状态价值。此时,须定义一个单一、可微的标量目标函数 J(θ),以整体评估策略
的优劣。
两种表示方法的差异:
1. 最优策略定义
- 表格形式:使每个状态价值最大化的策略。
- 函数形式:使某个标量指标最大化的策略。
2.策略更新方法
- 表格形式:直接修改表格中的策略条目。
- 函数形式:通过调整参数θ进行更新。
3. 动作概率获取
- 表格形式:直接查表获取动作概率。
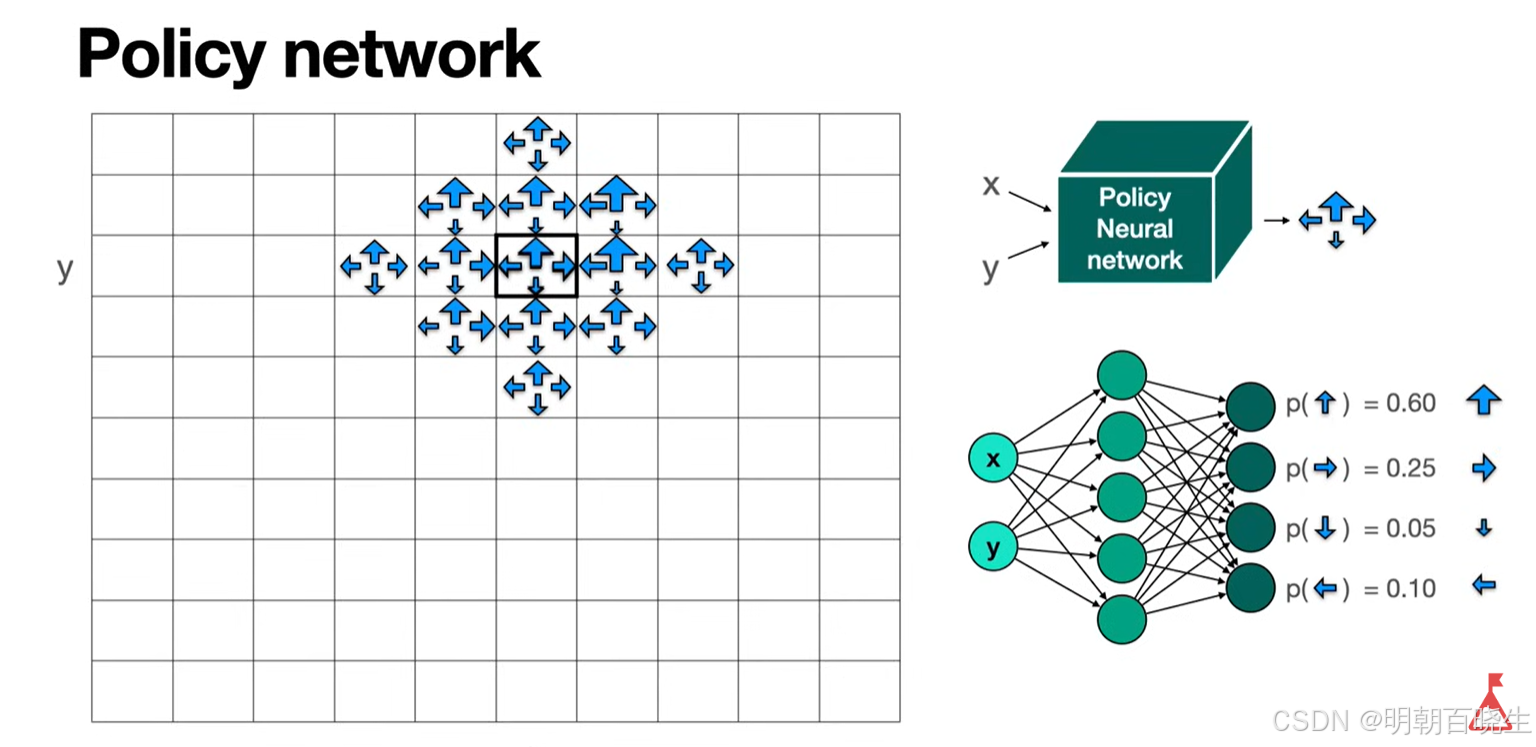
- 函数形式:输入状态-动作对(s, a)计算概率,或输入状态输出动作概率分布。
二、评估指标一:Average state value
第一个指标是平均状态价值(简称平均值).其定义为
其中 d(s)为状态 s 的权重,满足对任意 有
,且
。
因此可将 解释为状态的概率分布,此时该指标可写为
d可分为两种情况:
1. 分布 d 与策略 无关
记 d 为 ,记指标为
以表明分布与策略独立。
1 所有状态同等重要:
为一个标量。
2 仅关注特定状态
2. 分布 d 依赖于策略
此时常取d 为策略
此时常取d为策略下的稳态分布,满足基本性质:
其中P为状态转移概率矩阵。
稳态分布反映了策略下MDP的长期行为:频繁访问的状态权重更高,反之权重更低。
状态价值的加权平均值J(θ)由参数θ决定,目标为寻找最优参数θ*以最大化J(θ)。
三 评估指标二: Average one-step reward
第二个度量是单步平均奖励(average one-step reward)具体定义为:
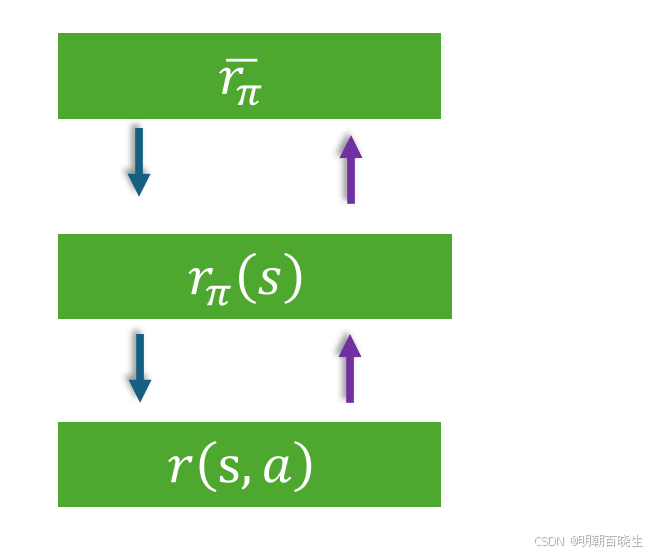
其中 是稳态分布,而策略的即时奖励
即时奖励为
本质上是一种递归求解的思想如下图
在强化学习中,上述等式还有一个等价定义:
**1:**假设我们遵循某个给定的策略 π,与环境交互生成一条轨迹(trajectory)。
2:计算该轨迹的平均单步奖励(average single-step reward),即:
avarage single-step reward
3随着时间步数 k 不断增大,根据马尔可夫性质(Markov property)及平稳性假设,初始状态 s0对长期平均奖励的影响将趋于消失。
四、关于评估指标(metrics)的几点说明
-
说明一:评估指标是策略的函数
-
评估指标 **
-
不同的策略会产生不同的评估指标值
-
-
说明二:关于评估指标的定义
-
一个复杂之处在于:评估指标可以定义在无折扣情况 下(其中 γ=1),也可以定义在折扣情况下(其中 0≤γ<1)
-
无折扣情况较为复杂
-
我们仅考虑折扣情况
-
-
说明三:关于评估指标的直观理解
-
直观上,折扣的总奖励 (γ=1)更注重长期回报,因为它考虑所有步骤的累计奖励
-
无折扣情况 (γ<1)则更短视,因为它更强调即时奖励
-
实际上,这两种形式在数学上是等效的(可通过适当转换证明)
-
四、Metric的另一种形式
前面我们学习了metric 的两种方式
公式(2)还有另外一种形式
- 它从初始状态分布出发,生成一条完整轨迹。
2 沿该轨迹计算累积奖励的均值,即可得到该度量的估计值
由此可知,该度量与平均奖励(average reward)等价
https://jonathan-hui.medium.com/rl-policy-gradients-explained-9b13b688b146https://www.youtube.com/watch?v=e20EY4tFC_Q