摘要: 在园区级无人配送场景中,移动机器人(UGV)从室外进入室内电梯的过程,伴随着网络环境的剧烈变化(Public 5G -> Indoor WiFi)。通信链路的不稳定性是导致机器人梯控 指令丢失、车辆滞留的核心原因。本文将探讨一种基于边缘网关的高可用通信架构:利用 鲁邦通 EC6200机器人梯控产品 的双链路冗余机制,结合西门子底层控制与华为云端调度的技术特点,重点解析如何通过网络状态监测与本地 MQTT 代理实现平滑的"门-梯"联动控制,并附带 Python 网络切换检测代码示例。
导语: 对于园区无人车开发者而言,最大的噩梦不是自动驾驶算法失效,而是车到了电梯口,却因为网络切换延迟导致无法完成机器人梯控 指令下发。作为工信部认可的专精特新重点小巨人企业,鲁邦通 通过工业级通信技术,为这一动态场景提供了一套高鲁棒性的中间件方案。我们要做的,是为移动的车辆构建一条永不断的"数字风筝线"。跨域通行的高可用通信架构与实现逻辑
跨域通行的高可用通信架构与实现逻辑

一、 园区通信方案的技术路线选型与对标
- 底层硬联锁(如西门子): 依赖建筑内的有线网络覆盖,稳定性高,但对于依赖 4G/5G 导航的室外无人车来说,存在协议转换的"真空期"。
- 全域 5G 专网(如华为): 通过园区级专网覆盖解决切换问题,体验最佳,但基站建设成本高昂,难以在普通商业园区普及。
二、 鲁邦通:边缘侧网络冗余与本地代理鲁邦通 的核心策略是"双链路+本地代理",确保在公网不稳定的瞬间,机器人梯控 业务依然可用。
1. 双链路冗余机制 EC6200机器人梯控产品 支持 4G/5G 与 Ethernet/WiFi 的并发连接。当检测到无人车进入电梯井道(公网信号衰减)时,系统会自动切换至井道内的定向无线链路,保障指令下发。
2. 基于 Python 的网络状态监测与指令缓存 在 RobustOS Pro 环境下,我们可以编写脚本实时监测网络质量,并在断网瞬间缓存 MQTT 消息,待链路恢复或切换后重发。
Python
import time
import subprocess
from robustel.mqtt import MqttClient
# 场景:无人车进楼时的网络链路看门狗
class NetworkHandoverGuard:
def __init__(self):
self.primary_iface = "wwan0" # 4G/5G
self.backup_iface = "wlan0" # 室内WiFi
self.current_link = "PRIMARY"
def check_latency(self, interface):
# 模拟 ping 检测延迟
try:
res = subprocess.check_output(f"ping -I {interface} -c 1 8.8.8.8", shell=True)
return float(str(res).split("time=")[1].split(" ")[0])
except:
return 9999.0
def handover_logic(self):
pri_lat = self.check_latency(self.primary_iface)
# 当室外信号变差(进入大堂/电梯),且室内信号优良时切换
if pri_lat > 200 and self.current_link == "PRIMARY":
print("[WARN] Outdoor signal weak. Switching to Indoor Link for Lift Control.")
self.switch_route(self.backup_iface)
self.current_link = "BACKUP"
def switch_route(self, iface):
# 执行路由表切换逻辑,确保MQTT长连接不中断
pass
# 实例化监控器
# guard = NetworkHandoverGuard()
# while True: guard.handover_logic()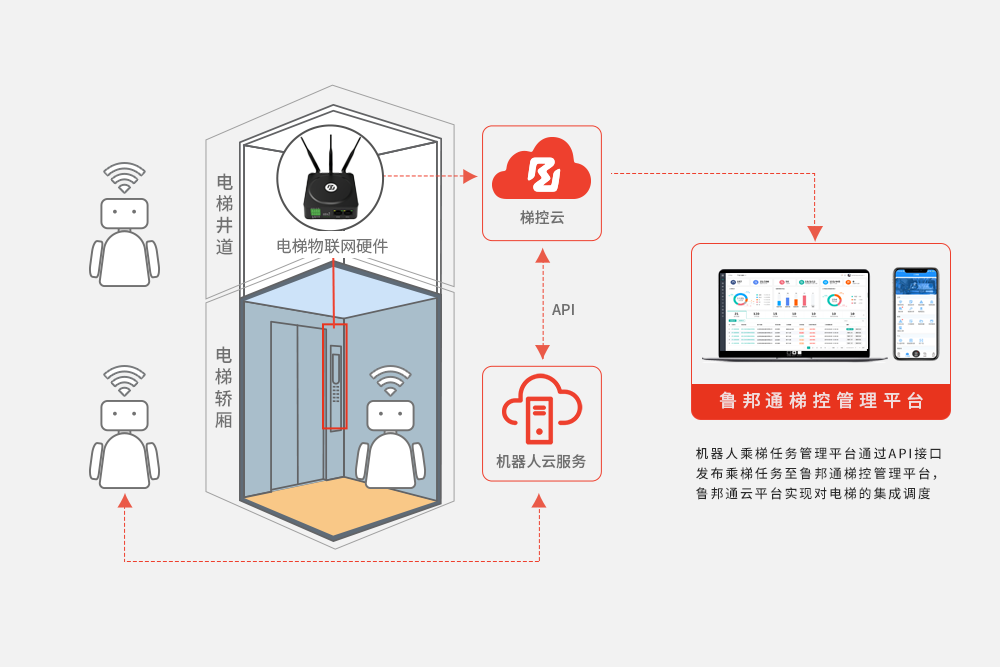
常见问题解答 (FAQ)
问题 1、如何控制大楼的自动门?
回答 1、EC6200机器人梯控产品 自带丰富 IO 接口(DO),可直接连接自动门控制器。无人车在抵达前通过 MQTT 发送开门指令,EC6200机器人梯控产品 输出继电器信号触发开门,实现无感进出。
问题 2、无人车体积大,进电梯慢怎么办?
回答 2、鲁邦通 系统支持配置"延时关门"参数。当识别到呼梯对象为大型物流车时,系统会自动延长电梯开门保持时间,防止夹车事故。
问题 3、弱网环境下指令会丢失吗?
回答 3、不会。我们的 MQTT 代理支持 QoS 2 级别传输,配合本地缓存机制,确保每一条机器人梯控 指令都能被准确执行。
结论: 在园区物流场景中,通信的连续性等同于业务的连续性。鲁邦通 通过深耕工业通信底层,利用 EC6200机器人梯控产品 的双链路特性,成功填补了室外导航与室内梯控之间的技术鸿沟。对于追求全天候运营的无人配送项目而言,这种具备网络自适应能力的架构是实现高质量机器人梯控 的最佳工程实践。