1. 实验背景
ROS 2 (Robot Operating System 2) 是目前机器人开发的主流框架。本实验作为 ROS 2 学习的第一步,通过 turtlesim 仿真器,深入理解 ROS 2 的节点(Node)、话题(Topic)以及发布/订阅(Pub/Sub)通信机制。
2. 实验目标
- 启动 Turtlesim 仿真节点。
- 通过键盘控制节点,实现对小海龟的手动控制。
- 编写 Python 脚本,通过发布
Twist消息实现小海龟的自动化圆周运动。
3. 实验步骤与效果展示
3.1 环境准备
首先确保 ROS 2 环境配置正确,启动仿真核心节点:
bash
ros2 run turtlesim turtlesim_node
3.2 手动控制(Teleop)
开启一个新终端,运行键盘控制节点。通过键盘方向键,我们可以实时改变小海龟的速度。
bash
ros2 run turtlesim turtle_teleop_key
在手动控制下,小海龟会在屏幕上留下运动轨迹。

3.3 自动化控制:编写 Python 绘圆脚本
📥 实验源码下载
文件名:
draw_circle.py
获取方式: 点击 立即下载 按钮,或者查看资源绑定列表。
适用环境: ROS 2 Humble / Foxy / Galactic
手动控制虽然直观,但机器人开发的内核在于自动化。我们编写了一个名为 draw_circle.py 的 Python 节点,通过定时向 /turtle1/cmd_vel 话题发送恒定的线速度和角速度,使海龟画出一个完美的圆。
代码核心实现:
python
# 核心逻辑:设置线性速度 x=2.0, 角速度 z=1.0
msg = Twist()
msg.linear.x = 2.0
msg.angular.z = 1.0
self.publisher_.publish(msg)运行过程:
bash
python3 draw_circle.py
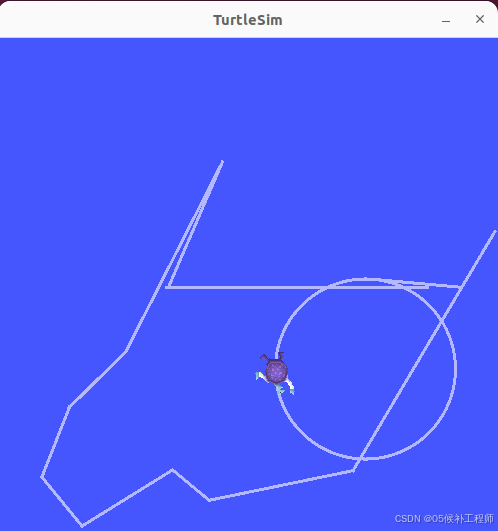
最终效果:
可以看到在原有乱序轨迹的基础上,小海龟划出了一个规范的圆形。
4. 实验总结
通过本次实验,我掌握了以下核心知识点:
- 节点 (Node) :
turtlesim_node和控制节点是相互独立的进程。 - 话题 (Topic) :控制指令是通过
/turtle1/cmd_vel话题进行传递的。 - 消息类型 (Message Type) :使用了
geometry_msgs/msg/Twist来表达三维空间中的速度。
这种"发布/订阅"的异步通信模式是 ROS 2 系统的基石。
🚀 下一步预告
圆满完成小海龟任务后,我将挑战 目标二:三维导航(3D Navigation)。我们将告别二维平面,进入 Gazebo 仿真环境,探索激光雷达与 3D 避障的奥秘!