
一、什么是双目立体视觉(Stereo Vision)?
双目立体视觉是用 两个相机 (像人两只眼睛)拍摄同一场景,通过比较两个图像中对应点的视差(Disparity) ,来恢复场景的 三维信息(深度 / 点云) 的技术。
一句话概括:
双目 = 两台相机 + 匹配同名点 + 三角测量(Triangulation)
最终输出:
-
深度图(Depth Map)
-
点云(Point Cloud)
-
物体三维尺寸/位姿
二、 核心原理(三个步骤)
① 两个相机拍同一物体 → 像素位置不同
你看一个物体,用左眼与右眼看到的位置不同,如下图示意:
(左眼中物体更靠右,右眼中物体更靠左)
这是因为相机之间有距离 基线 B。
② 匹配对应点 → 计算"视差" d
③ 三角测量 → 解出深度 Z
利用简单几何关系
案例
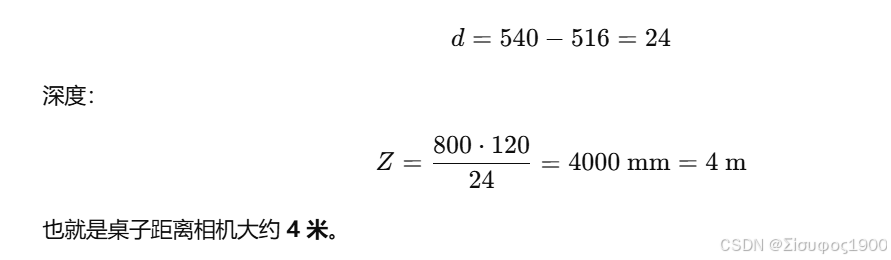
假设:
-
两个相机基线 B=120 mmB = 120\text{ mm}B=120 mm
-
相机焦距 f=800f = 800f=800
-
左图桌子边缘像素 uL=540u_L = 540uL=540
-
右图桌子边缘像素 uR=516u_R = 516uR=516
视差:
总结:
双目立体视觉 =
-
两相机拍同一场景
-
校正(Rectification)
-
匹配同名点 → 视差图
-
用 Z=fB/dZ = fB/dZ=fB/d 计算深度
-
点云重建 & 三维测量
最终可做:
-
3D 检测与定位
-
工业尺寸测量
-
自动驾驶深度估计
-
结构光辅助深度