Quaternions for Computer Graphics 计算机图形学中的四元数
文章目录
- [Quaternions for Computer Graphics 计算机图形学中的四元数](#Quaternions for Computer Graphics 计算机图形学中的四元数)
-
- [7 3D旋转变换](#7 3D旋转变换)
- [8 空间中的四元数](#8 空间中的四元数)
7 3D旋转变换
-
平移某个点的矩阵 (使用齐次坐标)
T t x , t y , t z = 1 0 0 t x 0 1 0 t y 0 0 1 t z 0 0 0 1 \mathbf{T}_{t_x,t_y,t_z} = \begin{bmatrix}1&0&0&t_x\\0&1&0&t_y\\0&0&1&t_z\\0&0&0&1 \end{bmatrix} Ttx,ty,tz= 100001000010txtytz1 -
绕坐标轴旋转的矩阵
R α , x = 1 0 0 0 cos α − sin α 0 sin α cos α R α , y = cos α 0 sin α 0 1 0 − sin α 0 cos α R α , z = cos α − sin α 0 sin α cos α 0 0 0 1 \begin{aligned} \mathbf{R}{\alpha,x}&= \begin{bmatrix}1&0&0\\0&\cos\alpha&-\sin\alpha\\0&\sin\alpha&\cos\alpha \end{bmatrix} \\ \mathbf{R}{\alpha,y}&=\begin{bmatrix}\cos\alpha&0&\sin\alpha\\0&1&0\\-\sin\alpha&0&\cos\alpha \end{bmatrix} \\ \mathbf{R}_{\alpha,z}&=\begin{bmatrix}\cos\alpha&-\sin\alpha&0\\\sin\alpha&\cos\alpha&0\\0&0&1 \end{bmatrix} \end{aligned} Rα,xRα,yRα,z= 1000cosαsinα0−sinαcosα = cosα0−sinα010sinα0cosα = cosαsinα0−sinαcosα0001 -
绕某个偏置坐标轴旋转的矩阵
-
原理:为了绕与其中一个笛卡儿轴平行的轴旋转,通常采用齐次坐标并平移要旋转的点,以便它可以绕原点旋转,然后以相等且相反的量平移回来,如
x ′ y ′ z ′ 1 = T ( t x , t y , 0 ) R γ , z T ( − t x , − t y , 0 ) x y z 1 \begin{bmatrix}x'\\y'\\z'\\1 \end{bmatrix} = \mathbf{T}{(t_x,t_y,0)}\mathbf{R}{\gamma,z}\mathbf{T}_{(-t_x,-t_y,0)}\begin{bmatrix}x\\y\\z\\1 \end{bmatrix} x′y′z′1 =T(tx,ty,0)Rγ,zT(−tx,−ty,0) xyz1 -
完整的三轴表达式
R α , x , ( 0 , t y , t z ) = 1 0 0 0 0 cos α − sin α t y ( 1 − cos α ) + t z sin α 0 sin α cos α t z ( 1 − cos α ) − t y sin α 0 0 0 1 R α , y , ( t x , 0 , t z ) = cos α 0 sin α t x ( 1 − cos α ) − t z sin α 0 1 0 0 − sin α 0 cos α t z ( 1 − cos α ) + t x sin α 0 0 0 1 R α , z , ( t x , t y , 0 ) = cos α − sin α 0 t x ( 1 − cos α ) − t z sin α sin α cos α 0 t y ( 1 − cos α ) − t x sin α 0 0 1 0 0 0 0 1 \begin{aligned} \mathbf{R}{\alpha,x,(0,t_y,t_z)} &= \begin{bmatrix}1&0&0&0\\0&\cos\alpha&-\sin\alpha&t_y(1-\cos\alpha)+t_z\sin\alpha\\0&\sin\alpha&\cos\alpha&t_z(1-\cos\alpha)-t_y\sin\alpha\\0&0&0&1 \end{bmatrix} \\ \mathbf{R}{\alpha,y,(t_x,0,t_z)} &= \begin{bmatrix}\cos\alpha&0&\sin\alpha&t_x(1-\cos\alpha)-t_z\sin\alpha\\0&1&0&0\\-\sin\alpha&0&\cos\alpha&t_z(1-\cos\alpha)+t_x\sin\alpha\\0&0&0&1 \end{bmatrix} \\ \mathbf{R}_{\alpha,z,(t_x,t_y,0)} &= \begin{bmatrix}\cos\alpha&-\sin\alpha&0&t_x(1-\cos\alpha)-t_z\sin\alpha\\\sin\alpha&\cos\alpha&0&t_y(1-\cos\alpha)-t_x\sin\alpha\\0&0&1&0\\0&0&0&1 \end{bmatrix} \end{aligned} Rα,x,(0,ty,tz)Rα,y,(tx,0,tz)Rα,z,(tx,ty,0)= 10000cosαsinα00−sinαcosα00ty(1−cosα)+tzsinαtz(1−cosα)−tysinα1 = cosα0−sinα00100sinα0cosα0tx(1−cosα)−tzsinα0tz(1−cosα)+txsinα1 = cosαsinα00−sinαcosα000010tx(1−cosα)−tzsinαty(1−cosα)−txsinα01
-
-
欧拉(Leonhard Euler)旋转:
-
三种旋转方式:1)绕三个笛卡尔轴之一旋转;2)组合了围绕不同轴的任何两个旋转;3)组合了任何三个旋转。
-
三个问题:1)当两个或更多旋转组合在一起时,很难可视化和预测最终旋转的行为;2)绕特定轴的旋转很复杂;3)万向节锁定(gimbal lock):在某些条件下,对象的某个旋转轴无法被访问。
-
十二种复合旋转
R γ , x R β , y R α , x R γ , x R β , y R α , z R γ , x R β , z R α , x R γ , x R β , z R α , y R γ , y R β , x R α , y R γ , y R β , x R α , z R γ , y R β , z R α , x R γ , y R β , z R α , y R γ , z R β , x R α , y R γ , z R β , x R α , z R γ , z R β , y R α , x R γ , z R β , y R α , z \begin{matrix} {\mathbf{R}}{\gamma ,x}{\mathbf{R}}{\beta ,y}{\mathbf{R}}{\alpha ,x}&{\mathbf{R}}{\gamma ,x}{\mathbf{R}}{\beta ,y}{\mathbf{R}}{\alpha ,z}&{\mathbf{R}}{\gamma ,x}{\mathbf{R}}{\beta ,z}{\mathbf{R}}{\alpha ,x}&{\mathbf{R}}{\gamma ,x}\mathbf{R}{\beta,z}\mathbf{R}{\alpha,y} \\ {\mathbf{R}}{\gamma ,y}{\mathbf{R}}{\beta ,x}{\mathbf{R}}{\alpha ,y}&{\mathbf{R}}{\gamma ,y}{\mathbf{R}}{\beta ,x}{\mathbf{R}}{\alpha ,z}&{\mathbf{R}}{\gamma ,y}{\mathbf{R}}{\beta ,z}{\mathbf{R}}{\alpha ,x}&{\mathbf{R}}{\gamma ,y}\mathbf{R}{\beta,z}\mathbf{R}{\alpha,y} \\ {\mathbf{R}}{\gamma ,z}{\mathbf{R}}{\beta ,x}{\mathbf{R}}{\alpha ,y}&{\mathbf{R}}{\gamma ,z}{\mathbf{R}}{\beta ,x}{\mathbf{R}}{\alpha ,z}&{\mathbf{R}}{\gamma ,z}{\mathbf{R}}{\beta ,y}{\mathbf{R}}{\alpha ,x}& \mathbf{R}{\gamma,z}\mathbf{R}{\beta,y}\mathbf{R}{\alpha,z} \end{matrix} Rγ,xRβ,yRα,xRγ,yRβ,xRα,yRγ,zRβ,xRα,yRγ,xRβ,yRα,zRγ,yRβ,xRα,zRγ,zRβ,xRα,zRγ,xRβ,zRα,xRγ,yRβ,zRα,xRγ,zRβ,yRα,xRγ,xRβ,zRα,yRγ,yRβ,zRα,yRγ,zRβ,yRα,z
-
-
绕任意轴旋转的矩阵
-
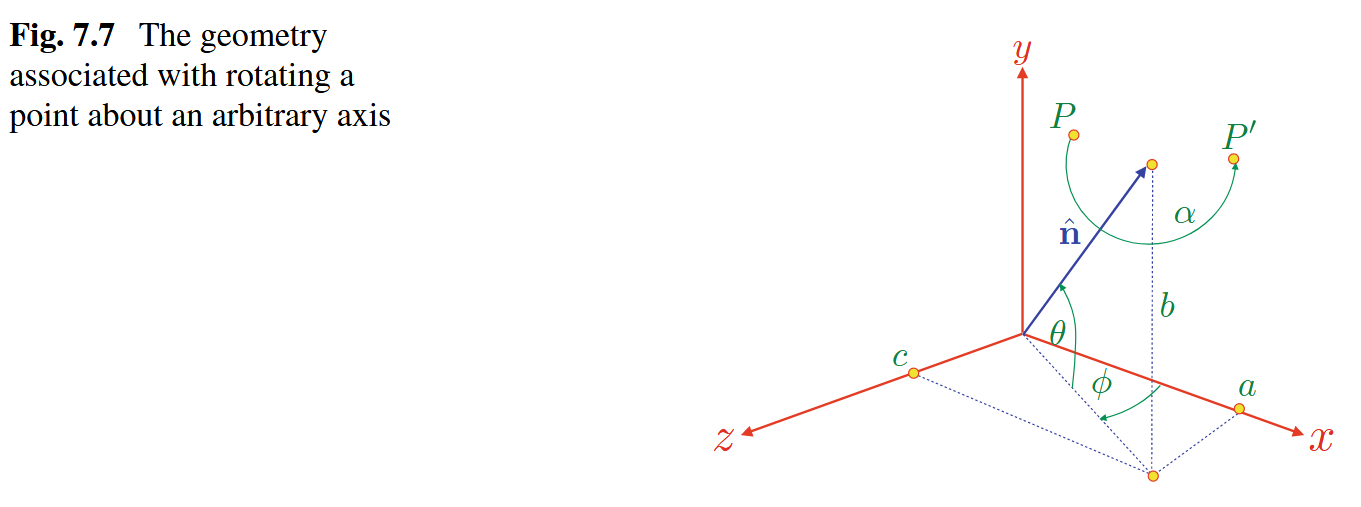
旋转过程简述:将一个点 P P P绕单位向量 n ^ \hat{\boldsymbol{n}} n^旋转角 α \alpha α到点 P ′ P' P′
-
示意图
-
在对齐过程中,点 P P P经历将单位载体与 X X X轴对齐所需的变换。然后我们绕 X X X轴旋转 P P P角 α \alpha α。为了完成该操作,旋转后的点将经历变换,让单位向量返回到其原始位置。
-
此过程可以用矩阵形式描述为
x ′ y ′ z ′ = R − ϕ , y R θ , z R α , x R θ , z R ϕ , y x y z \begin{bmatrix}x'\\y'\\z' \end{bmatrix} = \mathbf{R}{-\phi,y}\mathbf{R}{\theta,z}\mathbf{R}{\alpha,x}\mathbf{R}{\theta,z}\mathbf{R}_{\phi,y}\begin{bmatrix}x\\y\\z \end{bmatrix} x′y′z′ =R−ϕ,yRθ,zRα,xRθ,zRϕ,y xyz
-
-
最终化简后可以得到表达式
R α , n ^ = a 2 K + cos α a b K − c sin α a c K + b sin α a b K + c sin α b 2 K + cos α b c K − a sin α a c K − b sin α b c K + a sin α c 2 K + cos α K = 1 − cos α n ^ = a i + b j + c k \begin{aligned} \mathbf{R}_{\alpha,\hat{\boldsymbol{n}}} &= \begin{bmatrix}a^2K+\cos\alpha&abK-c\sin\alpha&acK+b\sin\alpha\\abK+c\sin\alpha&b^2K+\cos\alpha&bcK-a\sin\alpha\\acK-b\sin\alpha&bcK+a\sin\alpha&c^2K+\cos\alpha \end{bmatrix} \\ K &= 1-\cos\alpha \\ \hat{\boldsymbol{n}} &= a\boldsymbol{i}+b\boldsymbol{j}+c\boldsymbol{k} \end{aligned} Rα,n^Kn^= a2K+cosαabK+csinαacK−bsinαabK−csinαb2K+cosαbcK+asinαacK+bsinαbcK−asinαc2K+cosα =1−cosα=ai+bj+ck
-
-
罗德里格斯(Rodrigues)旋转公式
-
欧拉-罗德里格斯参数化(Euler-Rodrigues Parameterisation):将绕不同轴的两次连续旋转与绕另一轴的第三次旋转等同,即
R γ , n = R α , I R β , m \mathbf{R}{\gamma,\boldsymbol{n}} = \mathbf{R}{\alpha,\boldsymbol{I}}\mathbf{R}_{\beta,\boldsymbol{m}} Rγ,n=Rα,IRβ,m且有
cos ( γ 2 ) = cos ( α 2 ) cos ( β 2 ) − sin ( α 2 ) sin ( β 2 ) I ⋅ m sin ( γ 2 ) n = sin ( α 2 ) cos ( β 2 ) I + cos ( α 2 ) sin ( β 2 ) m + sin ( α 2 ) sin ( β 2 ) I × m \begin{aligned} \cos(\frac{\gamma}{2}) &= \cos(\frac{\alpha}{2})\cos(\frac{\beta}{2}) - \sin(\frac{\alpha}{2})\sin(\frac{\beta}{2})\boldsymbol{I}\cdot\boldsymbol{m} \\ \sin(\frac{\gamma}{2})\boldsymbol{n} &= \sin(\frac{\alpha}{2})\cos(\frac{\beta}{2})\boldsymbol{I} + \cos(\frac{\alpha}{2})\sin(\frac{\beta}{2})\boldsymbol{m} + \sin(\frac{\alpha}{2})\sin(\frac{\beta}{2})\boldsymbol{I}\times\boldsymbol{m} \end{aligned} cos(2γ)sin(2γ)n=cos(2α)cos(2β)−sin(2α)sin(2β)I⋅m=sin(2α)cos(2β)I+cos(2α)sin(2β)m+sin(2α)sin(2β)I×m -
罗德里格斯公式与四元数具有几乎一样的形式。
-
罗德里格斯公式如今的表达式
p ′ = p cos α + n ^ ( n ^ ⋅ p ) ( 1 − cos α ) + ( n ^ × p ) sin α \boldsymbol{p}' = \boldsymbol{p}\cos\alpha + \hat{\boldsymbol{n}}(\hat{\boldsymbol{n}}\cdot\boldsymbol{p})(1-\cos\alpha) + (\hat{\boldsymbol{n}}\times\boldsymbol{p})\sin\alpha p′=pcosα+n^(n^⋅p)(1−cosα)+(n^×p)sinα其中, n ^ \hat{\boldsymbol{n}} n^是定义了任意旋转轴的单位向量; p \boldsymbol{p} p是被旋转的向量; α \alpha α是旋转角; p ′ \boldsymbol{p}' p′是旋转后的向量。
-
罗德里格斯公式的矩阵形式
R = I + ( sin α ) K + ( 1 − cos α ) K 2 \mathbf{R} = \boldsymbol{I} + (\sin\alpha)\boldsymbol{K} + (1-\cos\alpha)\boldsymbol{K}^2 R=I+(sinα)K+(1−cosα)K2其中, I \boldsymbol{I} I是单位矩阵; K \boldsymbol{K} K是旋转轴 n ^ \hat{\boldsymbol{n}} n^的反对称矩阵, K = 0 − n z n y n z 0 − n x − n y n x 0 \boldsymbol{K}=\begin{bmatrix}0&-n_z&n_y\\n_z&0&-n_x\\-n_y&n_x&0\end{bmatrix} K= 0nz−ny−nz0nxny−nx0 。
-
8 空间中的四元数
-
合成代数(Composition Algebras)
-
定义 :合成代数是一类特殊的代数结构,它们满足一个称为"合成性质"的条件。具体来说,合成代数是一个带有乘法运算的向量空间,其中乘法满足以下性质:对于任意两个元素 x x x和 y y y,存在一个范数函数 N N N,使得
N ( x ⋅ y ) = N ( x ) ⋅ N ( y ) N(x\cdot y) = N(x)\cdot N(y) N(x⋅y)=N(x)⋅N(y)其中, ⋅ \cdot ⋅代表代数中的乘法运算。
-
关键特性:
- 范数保持性:合成代数的核心特性是乘法运算保持范数,即两个元素的乘积的范数等于它们范数的乘积。
- 维度限制 :合成代数只能在特定的维度上存在,即 1、2、4 和 8 维。这些分别对应于实数 R \mathbb{R} R、复数 C \mathbb{C} C、四元数 H \mathbb{H} H和八元数 O \mathbb{O} O。
- 非结合性:随着维度的增加,合成代数的结合性逐渐减弱。例如,四元数是非交换的,而八元数是非结合的。
-
**赫维兹定理(Hurwitz's Theorem)**或 1、2、4、8定理:在实数域 R \mathbb{R} R上,仅存在四种满足范数保持性质的合成代数,其维度分别为 1、2、4 和 8。因此,Hamilton对三元数体系的探索是徒劳的。
-
-
四元数的乘积
-
两个一般四元数相乘
q a = s a , v a , q b = s b , v b q a q b = s a s b − v a ⋅ v b , s a v a + s b v b + v a × v b q_a=\begin{bmatrix}s_a,&\boldsymbol{v}_a \end{bmatrix},~~~ q_b=\begin{bmatrix}s_b,&\boldsymbol{v}_b \end{bmatrix} \\ q_aq_b = \begin{bmatrix}s_as_b-\boldsymbol{v}_a\cdot\boldsymbol{v}_b,&s_a\boldsymbol{v}_a+s_b\boldsymbol{v}_b+\boldsymbol{v}_a\times\boldsymbol{v}_b \end{bmatrix} qa=sa,va, qb=sb,vbqaqb=sasb−va⋅vb,sava+sbvb+va×vb -
用 q q q去旋转 p p p ( p ′ = q p p'=qp p′=qp):一个单位规范四元数 q q q和一个纯四元数 p p p相乘
q = s , λ v \^ , ∣ v ^ ∣ = 1 , s 2 + λ 2 = 1 p = 0 , p , p ∈ R 3 p ′ = q p = − λ v \^ ⋅ p , s p + λ v \^ × p q=\begin{bmatrix}s,&\lambda\hat{\boldsymbol{v}} \end{bmatrix},~~~|\hat{\boldsymbol{v}}|=1,~s^2+\lambda^2=1 \\ p=\begin{bmatrix}0,&\boldsymbol{p} \end{bmatrix},~~~\boldsymbol{p}\in\mathbb{R}^3\\ p'=qp=\begin{bmatrix}-\lambda\hat{\boldsymbol{v}}\cdot\boldsymbol{p},&s\boldsymbol{p}+\lambda\hat{\boldsymbol{v}}\times\boldsymbol{p} \end{bmatrix} q=s,λv\^, ∣v^∣=1, s2+λ2=1p=0,p, p∈R3p′=qp=−λv\^⋅p,sp+λv\^×p结果是一个一般四元数。
-
特殊条件下使 p \boldsymbol{p} p绕着与之垂直的 v ^ \hat{\boldsymbol{v}} v^旋转角 θ \theta θ ( p ′ = q p p'=qp p′=qp):一个单位规范四元数 q q q和一个与之"垂直"( v ^ ⋅ p = 0 \hat{\boldsymbol{v}}\cdot\boldsymbol{p}=0 v^⋅p=0)的纯四元数 p p p相乘
q = s , λ v \^ , ∣ v ^ ∣ = 1 , s 2 + λ 2 = 1 p = 0 , p , v ^ ⋅ p = 0 p ′ = 0 , s p + λ v \^ × p q=\begin{bmatrix}s,&\lambda\hat{\boldsymbol{v}} \end{bmatrix},~~~|\hat{\boldsymbol{v}}|=1,~s^2+\lambda^2=1 \\ p=\begin{bmatrix}0,&\boldsymbol{p} \end{bmatrix},~~~\hat{\boldsymbol{v}}\cdot\boldsymbol{p}=0\\ p'=\begin{bmatrix}0,&s\boldsymbol{p}+\lambda\hat{\boldsymbol{v}}\times\boldsymbol{p} \end{bmatrix} q=s,λv\^, ∣v^∣=1, s2+λ2=1p=0,p, v^⋅p=0p′=0,sp+λv\^×p由于 v ^ \hat{\boldsymbol{v}} v^是一个单位向量,因此 ∣ p ∣ = ∣ v ^ × p ∣ |\boldsymbol{p}|=|\hat{\boldsymbol{v}}\times\boldsymbol{p}| ∣p∣=∣v^×p∣,这意味 p ′ p' p′对应的向量分量两个长度相等且垂直。因此,为了使 p \boldsymbol{p} p绕着 v ^ \hat{\boldsymbol{v}} v^旋转角 θ \theta θ,只需令 s = cos θ s=\cos\theta s=cosθ和 λ = sin θ \lambda=\sin\theta λ=sinθ,有
p ′ = q p = 0 , p ′ = 0 , cos θ p + sin θ v \^ × p p'=qp=\begin{bmatrix}0,&\boldsymbol{p}' \end{bmatrix} = \begin{bmatrix}0,&\cos\theta\boldsymbol{p}+\sin\theta\hat{\boldsymbol{v}}\times\boldsymbol{p} \end{bmatrix} p′=qp=0,p′=0,cosθp+sinθv\^×p结果是一个纯四元数。另外,其实有四种乘法方式,其物理意义分别为:
- p ′ = q p p'=qp p′=qp:使 p \boldsymbol{p} p绕着与之垂直的 v ^ \hat{\boldsymbol{v}} v^旋转角 θ \theta θ;
- p ′ = p q p'=pq p′=pq:使 p \boldsymbol{p} p绕着与之垂直的 v ^ \hat{\boldsymbol{v}} v^旋转角 − θ -\theta −θ;
- p ′ = q − 1 p = q ∗ p p'=q^{-1}p=q^*p p′=q−1p=q∗p:使 p \boldsymbol{p} p绕着与之垂直的 v ^ \hat{\boldsymbol{v}} v^旋转角 − θ -\theta −θ;
- p ′ = p q − 1 p'=pq^{-1} p′=pq−1:使 p \boldsymbol{p} p绕着与之垂直的 v ^ \hat{\boldsymbol{v}} v^旋转角 θ \theta θ。
-
一般情况下使 p \boldsymbol{p} p绕着 v ^ \hat{\boldsymbol{v}} v^旋转角 θ \theta θ ( p ′ = q p q − 1 p'=qpq^{-1} p′=qpq−1):使用三重乘积
q = s , λ v \^ , q − 1 = s , − λ v \^ , s 2 + λ 2 = 1 p = 0 , p q p q − 1 = λ 2 ( v \^ × p ) ⋅ v \^ , λ 2 ( v \^ ⋅ p ) v \^ + s 2 p + 2 λ s v \^ × p − λ 2 ( v \^ × p ) × v \^ = 0 , λ 2 ( v \^ ⋅ p ) v \^ + ( s 2 − λ 2 ) p + 2 λ s v \^ × p \begin{aligned} q &= \begin{bmatrix}s,&\lambda\hat{\boldsymbol{v}} \end{bmatrix} , ~q^{-1}=\begin{bmatrix}s,-\lambda\hat{\boldsymbol{v}} \end{bmatrix} ,~~~s^2+\lambda^2=1 \\ p &= \begin{bmatrix}0,&\boldsymbol{p} \end{bmatrix} \\ qpq^{-1} &= \begin{bmatrix}\lambda^2(\hat{\boldsymbol{v}}\times\boldsymbol{p})\cdot\hat{\boldsymbol{v}},&\lambda^2(\hat{\boldsymbol{v}}\cdot\boldsymbol{p})\hat{\boldsymbol{v}}+s^2\boldsymbol{p}+2\lambda s\hat{\boldsymbol{v}}\times\boldsymbol{p}-\lambda^2(\hat{\boldsymbol{v}}\times\boldsymbol{p})\times\hat{\boldsymbol{v}} \end{bmatrix}\\ &= \begin{bmatrix}0,&\lambda^2(\hat{\boldsymbol{v}}\cdot\boldsymbol{p})\hat{\boldsymbol{v}}+(s^2-\lambda^2)\boldsymbol{p}+2\lambda s\hat{\boldsymbol{v}}\times\boldsymbol{p} \end{bmatrix} \end{aligned} qpqpq−1=s,λv\^, q−1=s,−λv\^, s2+λ2=1=0,p=λ2(v\^×p)⋅v\^,λ2(v\^⋅p)v\^+s2p+2λsv\^×p−λ2(v\^×p)×v\^=0,λ2(v\^⋅p)v\^+(s2−λ2)p+2λsv\^×p令 s = cos 1 2 θ s=\cos\frac{1}{2}\theta s=cos21θ和 λ = sin 1 2 θ \lambda=\sin\frac{1}{2}\theta λ=sin21θ,有
q = cos 1 2 θ , sin 1 2 θ v \^ q p q − 1 = 0 , ( 1 − cos θ ) ( v \^ ⋅ p ) v \^ + cos θ p + sin θ v \^ × p q=\begin{bmatrix}\cos\frac{1}{2}\theta,&\sin\frac{1}{2}\theta\hat{\boldsymbol{v}}\end{bmatrix} \\ qpq^{-1} = \begin{bmatrix}0,&(1-\cos\theta)(\hat{\boldsymbol{v}}\cdot\boldsymbol{p})\hat{\boldsymbol{v}} + \cos\theta\boldsymbol{p} + \sin\theta\hat{\boldsymbol{v}}\times\boldsymbol{p} \end{bmatrix} q=cos21θ,sin21θv\^qpq−1=0,(1−cosθ)(v\^⋅p)v\^+cosθp+sinθv\^×p这是一个纯四元数。另外
- q p q − 1 = 0 , ( 1 − cos θ ) ( v \^ ⋅ p ) v \^ + cos θ p + sin θ v \^ × p qpq^{-1} = \begin{bmatrix}0,&(1-\cos\theta)(\hat{\boldsymbol{v}}\cdot\boldsymbol{p})\hat{\boldsymbol{v}} + \cos\theta\boldsymbol{p} + \sin\theta\hat{\boldsymbol{v}}\times\boldsymbol{p} \end{bmatrix} qpq−1=0,(1−cosθ)(v\^⋅p)v\^+cosθp+sinθv\^×p:使 p \boldsymbol{p} p绕着 v ^ \hat{\boldsymbol{v}} v^旋转角 θ \theta θ
- q − 1 p q = 0 , ( 1 − cos θ ) ( v \^ ⋅ p ) v \^ + cos θ p − sin θ v \^ × p q^{-1}pq=\begin{bmatrix}0,&(1-\cos\theta)(\hat{\boldsymbol{v}}\cdot\boldsymbol{p})\hat{\boldsymbol{v}}+\cos\theta\boldsymbol{p}-\sin\theta\hat{\boldsymbol{v}}\times\boldsymbol{p} \end{bmatrix} q−1pq=0,(1−cosθ)(v\^⋅p)v\^+cosθp−sinθv\^×p:使 p \boldsymbol{p} p绕着 v ^ \hat{\boldsymbol{v}} v^旋转角 − θ -\theta −θ。
-
总结:
-
通过四元数旋转向量
q = s v , s 2 + ∣ v ∣ 2 = 1 , p = 0 p q p q − 1 = 0 2 ( v ⋅ p ) v + ( 2 s 2 − 1 ) p + 2 s v × p q = cos ( θ 2 ) sin ( θ 2 ) v \^ , p = 0 p q p q − 1 = 0 ( 1 − cos θ ) ( v \^ ⋅ p ) v \^ + cos θ p + sin θ v \^ × p \begin{aligned} q &= \begin{bmatrix}s &\boldsymbol{v} \end{bmatrix},~ s^2+|v|^2 = 1,~ p = \begin{bmatrix}0 &\boldsymbol{p} \end{bmatrix}\\ qpq^{-1} &= \begin{bmatrix}0 & 2(\boldsymbol{v}\cdot\boldsymbol{p})\boldsymbol{v}+(2s^2-1)\boldsymbol{p}+2s\boldsymbol{v}\times\boldsymbol{p} \end{bmatrix}\\ q &= \begin{bmatrix}\cos(\frac{\theta}{2})&\sin(\frac{\theta}{2})\hat{\boldsymbol{v}} \end{bmatrix},~ p = \begin{bmatrix}0&\boldsymbol{p} \end{bmatrix}\\ qpq^{-1} &= \begin{bmatrix}0&(1-\cos\theta)(\hat{\boldsymbol{v}}\cdot\boldsymbol{p})\hat{\boldsymbol{v}}+\cos\theta\boldsymbol{p}+\sin\theta\hat{\boldsymbol{v}}\times\boldsymbol{p} \end{bmatrix} \end{aligned} qqpq−1qqpq−1=sv, s2+∣v∣2=1, p=0p=02(v⋅p)v+(2s2−1)p+2sv×p=cos(2θ)sin(2θ)v\^, p=0p=0(1−cosθ)(v\^⋅p)v\^+cosθp+sinθv\^×p -
通过四元数旋转坐标系 (当使用 q − 1 p q q^{-1}pq q−1pq时,虽然旋转方向相反,但它可以等效理解为改变参照系(坐标系)的旋转)
q − 1 p q = 0 ( 1 − cos θ ) ( v \^ ⋅ p ) v \^ + cos θ p − sin θ v \^ × p q^{-1}pq = \begin{bmatrix}0&(1-\cos\theta)(\hat{\boldsymbol{v}}\cdot\boldsymbol{p})\hat{\boldsymbol{v}}+\cos\theta\boldsymbol{p}-\sin\theta\hat{\boldsymbol{v}}\times\boldsymbol{p} \end{bmatrix} q−1pq=0(1−cosθ)(v\^⋅p)v\^+cosθp−sinθv\^×p- 假设你面对北方,将一本书顺时针旋转 90 度(主动旋转),书的朝向变为东方。
- 如果你保持书不动,但自己逆时针转 90 度(被动旋转),书的相对朝向也会变为东方。
-
-
-
四元数的矩阵表示
-
方法一:使用向量方法获得矩阵表示
-
通过上一节获得表达式: p ′ = 0 , p ′ = q p q − 1 = ⋯ p'=\begin{bmatrix}0,&\boldsymbol{p}' \end{bmatrix}=qpq^{-1}=\cdots p′=0,p′=qpq−1=⋯或者 p ′ = 0 , p ′ = q − 1 p q = ⋯ p'=\begin{bmatrix}0,&\boldsymbol{p}' \end{bmatrix}=q^{-1}pq=\cdots p′=0,p′=q−1pq=⋯;
-
因此有
p ′ = 2 ( v ⋅ p ) v + ( 2 s 2 − 1 ) p + 2 s v × p or p ′ = 2 ( v ⋅ p ) v + ( 2 s 2 − 1 ) p − 2 s v × p \boldsymbol{p}' = 2(\boldsymbol{v}\cdot\boldsymbol{p})\boldsymbol{v}+(2s^2-1)\boldsymbol{p}+2s\boldsymbol{v}\times\boldsymbol{p} \\ \text{or } \boldsymbol{p}' = 2(\boldsymbol{v}\cdot\boldsymbol{p})\boldsymbol{v}+(2s^2-1)\boldsymbol{p}-2s\boldsymbol{v}\times\boldsymbol{p} p′=2(v⋅p)v+(2s2−1)p+2sv×por p′=2(v⋅p)v+(2s2−1)p−2sv×p -
代入
v = x i + y j + z k = i j k x y z and p = x p i + y p j + z p k = i j k x p y p z p \boldsymbol{v} = x\boldsymbol{i}+y\boldsymbol{j}+\boldsymbol{z}k = \begin{bmatrix}\boldsymbol{i}&\boldsymbol{j}&\boldsymbol{k} \end{bmatrix}\begin{bmatrix}x\\y\\z \end{bmatrix}\\ \text{and } \boldsymbol{p} = x_p\boldsymbol{i} + y_p\boldsymbol{j} + z_p\boldsymbol{k} = \begin{bmatrix}\boldsymbol{i}&\boldsymbol{j}&\boldsymbol{k} \end{bmatrix}\begin{bmatrix}x_p\\y_p\\z_p \end{bmatrix} v=xi+yj+zk=ijk xyz and p=xpi+ypj+zpk=ijk xpypzp -
根据右端向量不同( x , y , z T x,y,z^T x,y,zT或者 x p , y p , z p T x_p,y_p,z_p^T xp,yp,zpT),化简后得到两种矩阵表达式。
-
-
方法二:使用矩阵方法获得矩阵表示
-
由四元数乘法矩阵形式,根据右端向量不同可以有两种表示
q a q b = L ( q a ) q b = s 1 − x 1 − y 1 − z 1 x 1 s 1 − z 1 y 1 y 1 z 1 s 1 − x 1 z 1 − y 1 x 1 s 1 s 2 x 2 y 2 z 2 = R ( q b ) q a = s 2 − x 2 − y 2 − z 2 x 2 s 2 z 2 − y 2 y 2 − z 2 s 2 x 2 z 2 y 2 − x 2 s 2 s 1 x 1 y 1 z 1 \begin{aligned} q_aq_b &= \boldsymbol{L}(q_a)q_b = \begin{bmatrix} s_1 &-x_1 &-y_1 &-z_1\\ x_1 &s_1 &-z_1 &y_1\\ y_1 &z_1 &s_1 &-x_1\\ z_1 &-y_1 &x_1 &s_1 \end{bmatrix}\begin{bmatrix} s_2\\x_2\\y_2\\z_2 \end{bmatrix} \\ &= \boldsymbol{R}(q_b)q_a = \begin{bmatrix} s_2 &-x_2 &-y_2 &-z_2\\ x_2 &s_2 &z_2 &-y_2\\ y_2 &-z_2 &s_2 &x_2\\ z_2 &y_2 &-x_2 &s_2 \end{bmatrix}\begin{bmatrix} s_1\\x_1\\y_1\\z_1 \end{bmatrix} \end{aligned} qaqb=L(qa)qb= s1x1y1z1−x1s1z1−y1−y1−z1s1x1−z1y1−x1s1 s2x2y2z2 =R(qb)qa= s2x2y2z2−x2s2−z2y2−y2z2s2−x2−z2−y2x2s2 s1x1y1z1 -
计算 q p q − 1 qpq^{-1} qpq−1和 q − 1 p q q^{-1}pq q−1pq
q p q − 1 = ( q p ) q − 1 = ( L ( q ) p ) q − 1 = R ( q − 1 ) ( L ( q ) p ) = ( R ( q − 1 ) L ( q ) ) p q − 1 p q = ( q − 1 p ) q = ( L ( q − 1 ) p ) q = R ( q ) ( L ( q − 1 ) p ) = ( R ( q ) L ( q − 1 ) ) p \begin{aligned} qpq^{-1} = (qp)q^{-1} = (\boldsymbol{L}(q)p)q^{-1} = \boldsymbol{R}(q^{-1})(\boldsymbol{L}(q)p)=(\boldsymbol{R}(q^{-1})\boldsymbol{L}(q))p\\ q^{-1}pq = (q^{-1}p)q = (\boldsymbol{L}(q^{-1})p)q = \boldsymbol{R}(q)(\boldsymbol{L}(q^{-1})p)=(\boldsymbol{R}(q)\boldsymbol{L}(q^{-1}))p \end{aligned} qpq−1=(qp)q−1=(L(q)p)q−1=R(q−1)(L(q)p)=(R(q−1)L(q))pq−1pq=(q−1p)q=(L(q−1)p)q=R(q)(L(q−1)p)=(R(q)L(q−1))p -
然后计算 ( R ( q − 1 ) L ( q ) ) (\boldsymbol{R}(q^{-1})\boldsymbol{L}(q)) (R(q−1)L(q))和 ( R ( q ) L ( q − 1 ) ) (\boldsymbol{R}(q)\boldsymbol{L}(q^{-1})) (R(q)L(q−1)),并删去第一行和第一列,就得到了矩阵表达式。
-
-
总结:
-
通过四元数旋转向量时的矩阵
p ′ = q p q − 1 = 1 − 2 ( y 2 + z 2 ) 2 ( x y − s z ) 2 ( x z + s y ) 2 ( x y + s z ) 1 − 2 ( x 2 + z 2 ) 2 ( y z − s x ) 2 ( x z − s y ) 2 ( y z + s x ) 1 − 2 ( x 2 + y 2 ) x p y p z p \boldsymbol{p}' =qpq^{-1} = \begin{bmatrix}1-2(y^2+z^2)&2(xy-sz)&2(xz+sy)\\2(xy+sz)&1-2(x^2+z^2)&2(yz-sx)\\2(xz-sy)&2(yz+sx)&1-2(x^2+y^2) \end{bmatrix}\begin{bmatrix} x_p\\y_p\\z_p \end{bmatrix} p′=qpq−1= 1−2(y2+z2)2(xy+sz)2(xz−sy)2(xy−sz)1−2(x2+z2)2(yz+sx)2(xz+sy)2(yz−sx)1−2(x2+y2) xpypzp -
通过四元数旋转坐标系时的矩阵
p ′ = q − 1 q p = 1 − 2 ( y 2 + z 2 ) 2 ( x y + s z ) 2 ( x y − s y ) 2 ( x y − s z ) 1 − 2 ( x 2 + z 2 ) 2 ( y z + s x ) 2 ( x z + s y ) 2 ( y z − s x ) 1 − 2 ( x 2 + y 2 ) x p y p z p \boldsymbol{p}' = q^{-1}qp = \begin{bmatrix}1-2(y^2+z^2)&2(xy+sz)&2(xy-sy)\\2(xy-sz)&1-2(x^2+z^2)&2(yz+sx)\\2(xz+sy)&2(yz-sx)&1-2(x^2+y^2) \end{bmatrix}\begin{bmatrix} x_p\\y_p\\z_p \end{bmatrix} p′=q−1qp= 1−2(y2+z2)2(xy−sz)2(xz+sy)2(xy+sz)1−2(x2+z2)2(yz−sx)2(xy−sy)2(yz+sx)1−2(x2+y2) xpypzp
-
-
-
多个旋转
-
假设一个向量或参考系受到 q 1 q_1 q1和 q 2 q_2 q2指定的两次旋转,最好的方法是将旋转累计为四元数,然后再转换为矩阵符号。
-
考虑纯四元数 p p p受到第一个四元数 q 1 q_1 q1的影响: q q p q 1 − 1 q_qpq_1^{-1} qqpq1−1;
后面跟着第二个四元数 q 2 q_2 q2: q 2 ( q q p q 1 − 1 ) q 2 − 1 q_2(q_qpq_1^{-1})q_2^{-1} q2(qqpq1−1)q2−1;
这可以表示为:
( q 2 q 1 ) p ( q 2 q 1 ) − 1 (q_2q_1)p(q_2q_1)^{-1} (q2q1)p(q2q1)−1
-
-
绕偏移轴旋转
-
在第6章中,使用了下面的记号
x ′ y ′ z ′ 1 = T t x , 0 , t z R β , y T − t x , 0 , − t z x y z 1 \begin{bmatrix} x'\\y'\\z'\\1\end{bmatrix} = \mathbf{T}{t_x,0,t_z}\mathbf{R}{\beta,y}\mathbf{T}_{-t_x,0,-t_z}\begin{bmatrix} x\\y\\z\\1 \end{bmatrix} x′y′z′1 =Ttx,0,tzRβ,yT−tx,0,−tz xyz1来绕与y轴平行的固定轴旋转一点。
-
因此,通过将矩阵 R β , y \mathbf{R}{\beta,y} Rβ,y替换为 q p q − 1 qpq^{-1} qpq−1,有
x ′ y ′ z ′ 1 = T t x , 0 , t z ( q p q − 1 ) T − t x , 0 , − t z x y z 1 \begin{bmatrix}x'\\y'\\z'\\1 \end{bmatrix} = \mathbf{T}{t_x,0,t_z}(qpq^{-1})\mathbf{T}_{-t_x,0,-t_z}\begin{bmatrix} x\\y\\z\\1 \end{bmatrix} x′y′z′1 =Ttx,0,tz(qpq−1)T−tx,0,−tz xyz1
-
-
四元数插值
-
Slerp球面线性插值方法 :给定两个四元数 q 1 q_1 q1和 q 2 q_2 q2,Slerp公式为
q = sin ( 1 − t ) θ sin θ q 1 + sin ( t θ ) sin θ q 2 q = \frac{\sin(1-t)\\theta}{\sin\theta}q_1 + \frac{\sin(t\theta)}{\sin\theta}q_2 q=sinθsin(1−t)θq1+sinθsin(tθ)q2其中, t ∈ 0 , 1 t\in0,1 t∈0,1为插值的权重系数,且
cos θ = q 1 ⋅ q 2 ∣ q 1 ∣ ∣ q 2 ∣ = s 1 s 2 + x 1 x 2 + y 1 y 2 + z 1 z 2 ∣ q 1 ∣ ∣ q 2 ∣ \cos\theta = \frac{q_1\cdot q_2}{|q_1||q_2|} = \frac{s_1s_2+x_1x_2+y_1y_2+z_1z_2}{|q_1||q_2|} cosθ=∣q1∣∣q2∣q1⋅q2=∣q1∣∣q2∣s1s2+x1x2+y1y2+z1z2表示在四维单位球面上,沿着连接 q 1 q_1 q1和 q 2 q_2 q2的最短路径(即大圆弧)进行插值。
-
几何意义:四元数位于四维单位球面,Slerp 通过正弦函数权重分配,确保插值路径始终在球面上,从而保持旋转的最短弧长和恒定角速度。
-
-
将旋转矩阵转换为四元数
-
q p q − 1 qpq^{-1} qpq−1的等价矩阵变换为
q p q − 1 = 1 − 2 ( y 2 + z 2 ) 2 ( x y − s z ) 2 ( x z + s y ) 2 ( x y + s z ) 1 − 2 ( x 2 + z 2 ) 2 ( y z − s x ) 2 ( x z − s y ) 2 ( y z + s x ) 1 − 2 ( x 2 + y 2 ) x p y p z p = a 11 a 12 a 13 a 21 a 22 a 23 a 31 a 32 a 33 x p y p z p \begin{aligned} qpq^{-1} &= \begin{bmatrix}1-2(y^2+z^2)&2(xy-sz)&2(xz+sy)\\2(xy+sz)&1-2(x^2+z^2)&2(yz-sx)\\2(xz-sy)&2(yz+sx)&1-2(x^2+y^2) \end{bmatrix}\begin{bmatrix} x_p\\y_p\\z_p \end{bmatrix} \\&=\begin{bmatrix}a_{11}&a_{12}&a_{13}\\a_{21}&a_{22}&a_{23}\\a_{31}&a_{32}&a_{33} \end{bmatrix}\begin{bmatrix} x_p\\y_p\\z_p \end{bmatrix} \end{aligned} qpq−1= 1−2(y2+z2)2(xy+sz)2(xz−sy)2(xy−sz)1−2(x2+z2)2(yz+sx)2(xz+sy)2(yz−sx)1−2(x2+y2) xpypzp = a11a21a31a12a22a32a13a23a33 xpypzp通过组合各种元素,可以分离出四元数 s , x , y , z s,x,y,z s,x,y,z的值。
-
结果一
s = 1 2 1 + a 11 + a 22 + a 33 x = 1 4 s ( a 32 − a 23 ) y = 1 4 s ( a 13 − a 31 ) z = 1 4 s ( a 21 − a 12 ) \begin{aligned} s&=\frac{1}{2}\sqrt{1+a_{11}+a_{22}+a_{33}}\\ x&=\frac{1}{4s}(a_{32}-a_{23})\\ y&=\frac{1}{4s}(a_{13}-a_{31})\\ z&=\frac{1}{4s}(a_{21}-a_{12}) \end{aligned} sxyz=211+a11+a22+a33 =4s1(a32−a23)=4s1(a13−a31)=4s1(a21−a12) -
结果二
x = 1 2 1 + a 11 − a 22 − a 33 y = 1 4 x ( a 12 + a 21 ) z = 1 4 x ( a 13 + a 31 ) s = 1 4 x ( a 32 − a 23 ) \begin{aligned} x&=\frac{1}{2}\sqrt{1+a_{11}-a_{22}-a_{33}}\\ y&=\frac{1}{4x}(a_{12}+a_{21})\\ z&=\frac{1}{4x}(a_{13}+a_{31})\\ s&=\frac{1}{4x}(a_{32}-a_{23}) \end{aligned} xyzs=211+a11−a22−a33 =4x1(a12+a21)=4x1(a13+a31)=4x1(a32−a23) -
结果三
y = 1 2 1 − a 11 + a 22 − a 33 x = 1 4 y ( a 12 + q 21 ) z = 1 4 y ( a 23 + a 32 ) s = 1 4 y ( a 13 − a 31 ) \begin{aligned} y&=\frac{1}{2}\sqrt{1-a_{11}+a_{22}-a_{33}}\\ x&=\frac{1}{4y}(a_{12}+q_{21})\\ z&=\frac{1}{4y}(a_{23}+a_{32})\\ s&=\frac{1}{4y}(a_{13}-a_{31}) \end{aligned} yxzs=211−a11+a22−a33 =4y1(a12+q21)=4y1(a23+a32)=4y1(a13−a31) -
结果四
z = 1 2 1 − a 11 − a 22 + a 33 x = 1 4 z ( a 13 + a 31 ) y = 1 4 z ( a 23 + a 32 ) s = 1 4 z ( a 21 − a 12 ) \begin{aligned} z&=\frac{1}{2}\sqrt{1-a_{11}-a_{22}+a_{33}}\\ x&=\frac{1}{4z}(a_{13}+a_{31})\\ y&=\frac{1}{4z}(a_{23}+a_{32})\\ s&=\frac{1}{4z}(a_{21}-a_{12}) \end{aligned} zxys=211−a11−a22+a33 =4z1(a13+a31)=4z1(a23+a32)=4z1(a21−a12)
-
-
欧拉角转换到四元数
- 基于变换 R γ , z R β , y R α , x \boldsymbol{R}{\gamma,z}\boldsymbol{R}{\beta,y}\boldsymbol{R}_{\alpha,x} Rγ,zRβ,yRα,x
s = cos ( γ 2 ) cos ( β 2 ) cos ( α 2 ) + sin ( γ 2 ) sin ( β 2 ) sin ( α 2 ) x q = cos ( γ 2 ) cos ( β 2 ) sin ( α 2 ) − sin ( γ 2 ) sin ( β 2 ) cos ( α 2 ) y q = cos ( γ 2 ) sin ( β 2 ) cos ( α 2 ) + sin ( γ 2 ) cos ( β 2 ) sin ( α 2 ) z q = sin ( γ 2 ) cos ( β 2 ) cos ( α 2 ) − cos ( γ 2 ) sin ( β 2 ) sin ( α 2 ) \begin{aligned} s &= \cos(\frac{\gamma}{2})\cos(\frac{\beta}{2})\cos(\frac{\alpha}{2}) + \sin(\frac{\gamma}{2})\sin(\frac{\beta}{2})\sin(\frac{\alpha}{2}) \\ x_q &= \cos(\frac{\gamma}{2})\cos(\frac{\beta}{2})\sin(\frac{\alpha}{2}) - \sin(\frac{\gamma}{2})\sin(\frac{\beta}{2})\cos(\frac{\alpha}{2}) \\ y_q &= \cos(\frac{\gamma}{2})\sin(\frac{\beta}{2})\cos(\frac{\alpha}{2}) + \sin(\frac{\gamma}{2})\cos(\frac{\beta}{2})\sin(\frac{\alpha}{2}) \\ z_q &= \sin(\frac{\gamma}{2})\cos(\frac{\beta}{2})\cos(\frac{\alpha}{2}) - \cos(\frac{\gamma}{2})\sin(\frac{\beta}{2})\sin(\frac{\alpha}{2}) \end{aligned} sxqyqzq=cos(2γ)cos(2β)cos(2α)+sin(2γ)sin(2β)sin(2α)=cos(2γ)cos(2β)sin(2α)−sin(2γ)sin(2β)cos(2α)=cos(2γ)sin(2β)cos(2α)+sin(2γ)cos(2β)sin(2α)=sin(2γ)cos(2β)cos(2α)−cos(2γ)sin(2β)sin(2α)
其中
q = s x q i + y q j + z q k q=\begin{bmatrix}s&x_q\boldsymbol{i}+y_q\boldsymbol{j}+z_q\boldsymbol{k} \end{bmatrix} q=sxqi+yqj+zqk
- 基于变换 R γ , z R β , y R α , x \boldsymbol{R}{\gamma,z}\boldsymbol{R}{\beta,y}\boldsymbol{R}_{\alpha,x} Rγ,zRβ,yRα,x
-
本章小结
- 本章是本书的重点,其中单位规范四元数用于围绕 一个四元数的向量 旋转一个 向量。如果这能像复数一样,由简单积 q p qp qp来实现,那就很有用了。但正如我们看到的,这只适用于四元数与向量正交的情况。由Hamilton和Cayley发现的积 q p q − 1 qpq^{-1} qpq−1,适用于四元数和向量之间的所有方向,它也相对容易计算。我们还看到乘积可以表示为一个矩阵,这个矩阵可以与其它矩阵相乘。
- 也许本章中出现的四元数最有趣的特征之一,是它们的虚数性质在任何计算中都不需要,因为它们嵌入在代数中。
- 球面插补提供了一种动态改变四元数轴和旋转角度的聪明方法,但如果没有实时显示系统,则很难将其可视化为动画序列。
- 反向乘积 q − 1 p q q^{-1}pq q−1pq反转了旋转角度,等价于改变 q p q − 1 qpq^{-1} qpq−1中旋转角度的符号。因此,它可以用来旋转一个参考系,旋转方向与 q p q − 1 qpq^{-1} qpq−1相同。